自动跟踪:让目标无可遁形
2014-12-31陈乾
文/陈乾
传统的视频监控一直是把摄像机作为一种视频采集工具,对特定区域发生的事件进行监视、记录,而对于发生事件的判断依然需要人来处理,这需要时刻有安保人员对实况画面进行查看。但在一个监控系统中,摄像机的数量往往成百上千,安保人员基本不可能做到对每个摄像机画面进行查看,往往是待事件发生之后对摄像机的录像进行回溯追查线索,这与人们想要的能实现“事前预判”与“事中告警”的视频监控系统存在偏差。

不仅要看清,能在录像中查到事件发生时的蛛丝马迹,更要能看懂,在事件发生前或者事件发生时发出告警提醒监控人员,这个需求推动了智能监控时代的到来。
球机是前端监控产品中比较特殊的一个系列,它有两个最重要的两个组件:一体化机芯和电机部件。一体化机芯确保球机能进行变倍变焦的灵活调节,适应各种距离监控;电机部件确保球机能在水平0~360°、垂直0~90°范围内转动,实现全方位监控。其实从球机的这两个关键组件中可以看出,球机产品是带有“智能基因”的,它的视野并不固定,可以根据用户的需要来灵活调整监控范围。比如,平时球机可以设置成广角,获取大范围视野,进行全局监控,一旦有可疑目标出现,可以第一时间变倍、操作云台,进行局部放大并对可疑目标进行跟踪,获取清晰的大图。可是这种跟踪还是摆脱不了人的操作,所以很多时候我们看到的是左图的现象:把球机当枪机使用。随着前端智能技术的发展,使得球机看懂画面中正在发生的事情成为可能,真正的自动跟踪才成为现实。
所谓自动跟踪,是指在球机的看守位画面内设定一个敏感区域,一旦球机识别到有移动目标进入该区域, 能自动控制镜头变倍,对移动目标放大,并控制云台对该目标跟踪,使目标一直处于画面中央,自动跟踪一直持续到设定跟踪时间结束或者直到目标消失,球机回到看守位准备下一次跟踪。该跟踪大致流程如下图所示:
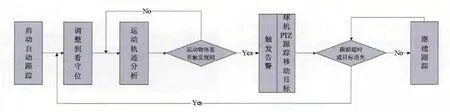
不同的厂家在各自的自动跟踪球上增加了一些特色业务,使得上面的流程更加多样化,如宇视科技的自动跟踪球增加了智能抓拍业务,在球机PTZ跟踪过程中,当目标放大到最清晰的时候能抓拍一张图片存储,并把该图片与本次跟踪告警事件关联,方便事后检索。但目前业界对自动跟踪的认识基本保持一致,对于目前的现状以及进一步的发展可以归结为以下两点。
支持枪球联动,实现多目标跟踪
从前文的自动跟踪流程中可以发现一个问题:当出现移动目标之后,球机对该目标放大跟踪,这时候如果再出现一个新目标,球机是无法检测到的。即多目标出现时,单个自动跟踪球只能对第一个触发规则的目标进行跟踪,而随后的多个目标都可能丢失,这在一些重要区域是绝对不允许发生的,如何解决这个问题呢?
最常见、也是最有效的一个方法就是枪球联动。在重要监控点设置一个枪机与一个球机,进行坐标关联,枪机监控全局,在画面重要位置设定禁区或者绊线,一旦发现移动目标触发规则后告知球机该目标的坐标,球机对该目标进行跟踪,这时候如果再出现新的目标,枪机依然能够检测到并告知球机新目标的坐标,球机能立即响应,开始跟踪新的目标。
对于大多数场景,一枪一球的配置已经足够,但部分人流量比较大的重点区域,很可能出现球机刚启动一个目标的跟踪时就需要切换到下一个目标的跟踪。球机会一直处于云台及变倍操作中,从而抓不到有效跟踪画面,而一枪多球可以有效解决这个问题,根据人流量设置相应的球机数量,枪机既做全局监控又做跟踪任务分配,每出现一个新目标后告知一个空闲的球机来跟踪,从而既不会遗漏目标,又能保证每个球机都能记录有效跟踪画面。
增加目标判断,实现接力跟踪
在一些管理严格的园区、监狱、军工企业、部队等地方,要求是对进入管控区域后的指定目标保持持续跟踪,而这个管控区域往往超出了一个摄像机的覆盖范围,这时候就需要多个设备之间能实现指定目标的接力跟踪。但是目前自动跟踪球机基本都是通过禁区、拌线来判断跟踪目标的,这种判断标准无法识别目标的身份,从而也就无法实现多设备之间的接力跟踪了。
要实现接力跟踪就需要增加目标身份识别的环节。在这些管控区域,主要的跟踪目标是人和车,而对应的智能身份识别的方式分别为人脸识别和车牌识别,似乎只要在自动跟踪球上增加这两个智能算法就能实现接力跟踪了,但其实不然。
以车牌识别为例,虽然在卡口、电警等设备上的车牌识别率已经达到了90%以上,但这高准确率是基于严格的安装标准的,其中最重要的一点就是设备必须得安装在车道正上方,正面对着来车方向。如果自动跟踪球也如此安装,一方面,球机的背面完全成为一个死角,背面来车不能第一时间启动跟踪响应;另一方面,即使是正面来车,由于球机一开始都在最广角的看守位,车牌在画面中的像素太小,不能第一时间识别出车辆身份,而当车牌能够识别时往往车辆已经离球机很近,再变倍放大启动跟踪也没有太大意义;同时,正面来车在到达球机正下方时,球机需要做自动翻转才能继续反向上仰进行跟踪,而这个动作很容易丢失目标。
球机最合适的安装点,应该是在警戒区附近的制高点,能覆盖整个区域,同时最好能垂直于目标移动轨迹,从而使移动目标的检测准确率更高。但是这些制高点位置由于角度及距离原因,是不能做人脸识别或者车牌识别的,那么需要怎样识别身份呢?
宇视科技在今年年中推出的“要人保卫”功能,是基于GPS来实现对指定目标的接力跟踪。平台通过手机或其他工具的GPS信息获取到目标的精确位置,实时查找该位置附近的球机,通过计算调整球机的云台角度,实现对目标的跟踪,目标离开该球机视野后,平台重新计算查找下一个合适的球机,进行跟踪接力。虽然该功能需要平台来统一调度,但前端普通球机也能实现对指定目标的跟踪,而且在地图上能呈现指定目标的移动轨迹,并实时弹出正在启动跟踪的球机画面,在用户体验上效果更好。
除了GPS之外,RFID、蓝牙等技术在不断发展,在身份识别上有其独到之处,且能快速集成到其他终端上,相信能很快应用在视频监控领域。

自动跟踪球机是在原有球机的基础上,利用图像分析技术,增强了产品功能,使操作人员的工作变得简单。更最重要的一点是一旦出现可疑目标,自动跟踪技术能第一时间通知到安保人员,使得“事前预判”与“事中告警”成为现实,而放大可疑目标查看细节并跟踪记录整个过程,使得“事后查证”更有价值。虽然还存在一些不足,但瑕不掩瑜,新技术的应用与普及必定会经历这一阶段,从整体来看,自动跟踪技术是智能监控时代的一个缩影,而这个时代正在缓缓而来。
