载人航天器放电调节器稳定性研究
2014-12-28
(中国空间技术研究院载人航天总体部,北京 100094)
1 引言
保持航天器一次电源母线电压的稳定是保证航天器平台安全、获得良好电磁兼容性(EMC)、维持各类负载可靠工作的基础和前提。放电调节器(BDR)是载人航天器一次电源系统的重要组成部分,其功能是在阴影区控制蓄电池放电,以保证一次电源母线电压稳定,因而研究影响放电调节器稳定性的关键因素是十分有必要的[1-3]。
在某载人航天器在轨飞行进入阴影时,航天器一次电源母线电压开始由BDR 控制蓄电池供电,此时母线电压存在振荡的不稳定现象。本文以采用太阳电池阵-蓄电池联合供电体制下全调节母线控制方式、混合型功率调节技术的载人航天器为例,对放电调节器进行稳定性研究。影响放电调节器稳定性的因素有很多,其中功率参数和控制参数的设计受到系统功能要求、品质要求等约束条件的限制,一次电源的运行环境因素受到航天器轨道、器件材料等多方面限制,无法轻易更改。本文在首先建立放电调节器稳定性分析模型的基础上,着重研究系统响应延迟对于放电调节器稳定性的影响,以为载人航天器放电调节器的设计提供参考依据。
2 载人航天器放电调节器稳定性建模
放电调节器由控制部分和功率部分组成[4-5],控制方法为经采样母线电压,采样信号与参考电压比较,其误差由比例积分控制器(PI控制器)进行积分放大形成放电控制信号,控制脉宽调制器(PWM)的占空比,经功率部分控制蓄电池放电,调节母线电压,构成反馈控制回路。某载人航天器放电调节器采用推挽升压式拓扑结构,其结构图如图1所示。
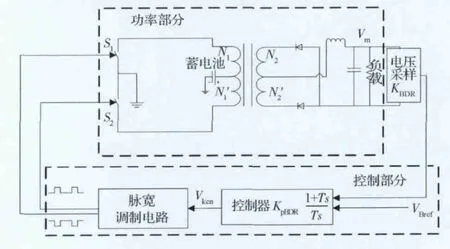
图1 放电调节器拓扑结构Fig.1 Component of BDR regulator
由放电调节器工作原理可知,放电控制信号Vkcn为

式中:KpBDR为PI控制器的比例增益;KBDR为母线采样系数;Vm为母线电压、VBref为参考电压。根据图1可以得出放电调节器的控制框图,如图2所示。
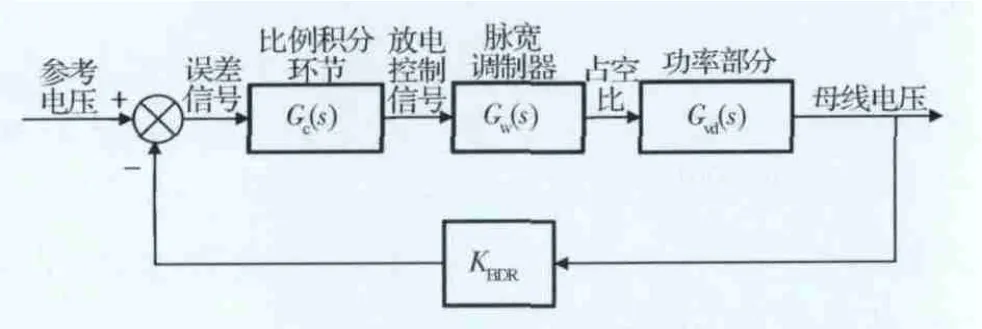
图2 BDR 控制框图Fig.2 Control block diagram of BDR
图中:Gc(s)为PI控制器的传递函数;GW(s)为从驱动电压到占空比的脉宽调制器的传递函数;Gvd(s)为从占空比到输出电压的功率部分的传递函数;KBDR为母线采样系数,s为拉氏变换中的复数变量。
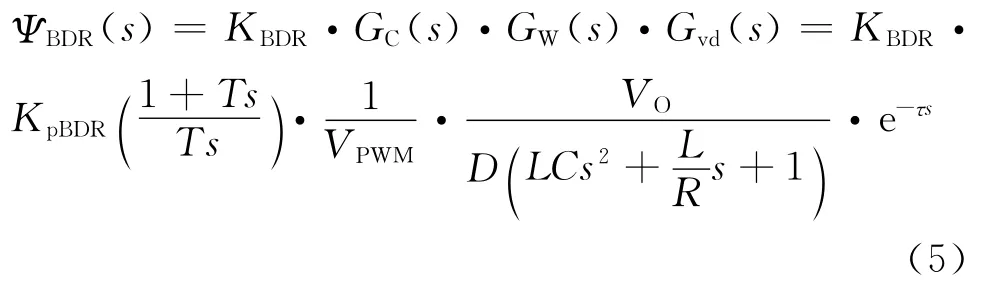
其中,根据PWM 控制原理可以得出其传递函数[6]

式中:VPWM为PWM 三角波峰峰值。
功率部分的传递函数[7-8]为

式中:VO为输出电压值,即设定的母线电压值;为输入电压值,即蓄电池输出电压值;为脉宽调制器占空比;D为脉宽调制器所能输出的最大占空比;L为功率部分滤波电路电感值;C为滤波电路电容与母线电容并联等效电容值;R为所接负载。
放电调节器的控制器为PI控制器,其的传递函数为

式中:KpBDR为PI控制器的比例增益;T为PI控制器的积分时间常数。
由于系统中存在相应延迟,相当于在控制回路中串联了一个延迟环节e-τs,(τ为延迟时间)根据以上得到放电调节器的开环传递函数为
3 系统延迟对放电调节器稳定性的影响
功率、控制参数、系统延迟时间长短以及运行环境都会影响放电调节器的稳定性,其中功率参数和控制参数因素受到品质、系统功能要求等约束条件的限制,运行环境因素受到航天器轨道、器件材料等多方面限制,无法轻易更改,而减小系统响应延迟相对容易,另外,当系统延迟过长时,会严重降低放电调节器的稳定裕度,甚至导致不稳定。因此,在所建模型基础上,须讨论系统延迟对放电调节器稳定性的影响。
3.1 稳定性分析
对于航天器一次电源系统,除了系统中所用的器件本身因响应速度的问题存在延迟,以及控制回路存在控制延迟外,当航天器从阳照区进入到阴影区,从分流域切换到放电域两域切换时,由于被控量变化还存在域间切换响应延迟,如果放电调节器、PWM 控制器的外围电路设计不当,则会造成实际升压信号响应时间远远落后于PWM 控制信号,此时系统延迟可达16ms以上。
本文采用对放电调节器开环传递函数进行频率特性分析的方法分析其稳定性,根据经典控制理论,系统的幅频特性、相频特性分别为各串联环节的对数幅频特性之和、各环节相频特性相加。延迟环节e-τs的频率特性为:当频率从0趋近正无穷时,幅频特性一直为0dB,相频特性从0°趋近负无穷,且τ越大相频特性趋近负无穷越快,即当系统中串联有延迟环节e-τs时,系统的幅频特性较原系统保持不变,相频特性会随着频率的增加而减小。所以,当系统中的响应延迟变大时,由于幅频特性不变,则剪切频率不变,而相频特性的变化使系统高频部分的相频特性降低,最后导致相角裕度减小。由此得出结论,系统中存在的延迟越大,系统的稳定裕度越低。
为验证此结论,以一次电源系统阴影区放电调节器PWM 控制信号与升压信号之间响应速度为变量,其他参数维持不变,分别绘制阴影区系统响应时间τ为20ms、15ms、5ms和0.5ms时的开环频率响应曲线,模型参数按照某载人飞船实际参数设置,详见表1,结果如图3所示。
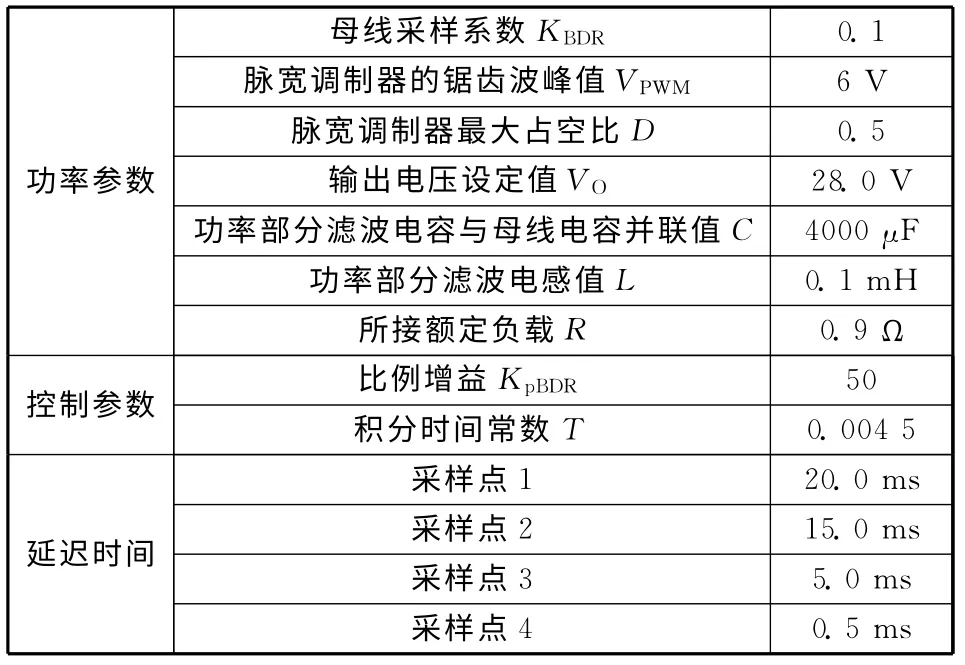
表1 仿真参数Table 1 Simulation parameters of BDR
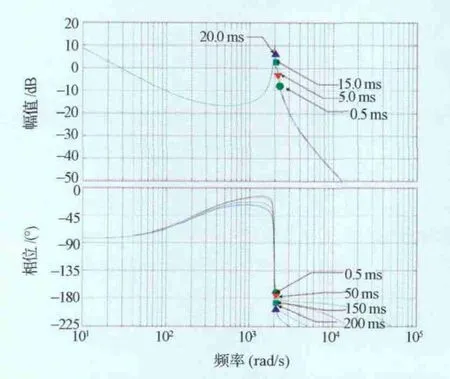
图3 系统延迟对放电调节器稳定性的影响Fig.3 Effect of system response delay on BDR’s stability
当放电调节器PWM 控制信号与升压信号之间响应速度从20ms减小到0.5ms时,系统的幅频特性没有变化,相频特性由于τ的减小产生了上抬,导致系统的相角裕度从-18.8°增大到9.57°,幅值裕度从-6.05dB增大到7.87dB,系统从不稳定变得稳定。
由图3还可以看出,当放电调节器负载1 W 且系统延迟达到5ms时,放电调节器的相角裕度和幅值裕度分别为0.15°和0.07dB,此时系统已达到临界稳定,即响应延迟为5ms是保证放电调节稳定的最低要求,从稳定性角度出发设计放电调节器时,应使系统的响应延迟减小到5ms以下。
3.2 电路仿真验证
为了验证3.1节稳定性分析的正确性,用Saber软件对整船一次电源进行仿真,分别对放电调节器不存在延迟时和存在20ms延迟时的进影过程进行仿真,母线电压波形如图4所示。
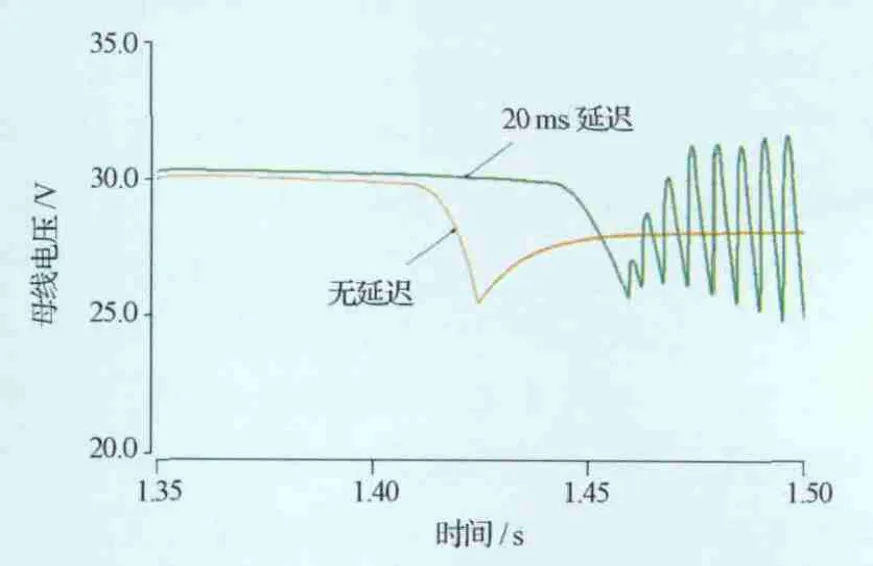
图4 系统延迟对一次电源系统稳定性的影响Fig.4 Effect of system response delay on BDR’s stability
由图4可见,当放电调节器无延迟时,阴影区母线电压稳定在28.3V;当延迟达到20ms,航天器进入阴影区放电调节器开始工作后,系统出现不稳定,母线电压出现25~32V 的大幅振荡。仿真结果与所得的结论一致,综上,过长的系统响应延迟会使放电调节器的稳定裕度降低,因此在进行航天器一次电源稳定性设计时应尽量降低放电调节器运行时的响应延迟。
4 地面验证情况
某载人航天器在轨组合体飞行时,当航天器进影时,太阳翼电平归零,母线电压出现27~33V 的大幅波动,如图5所示,绿色曲线为航天器母线电压,红色曲线为升压信号,蓝色曲线为PWM 信号。
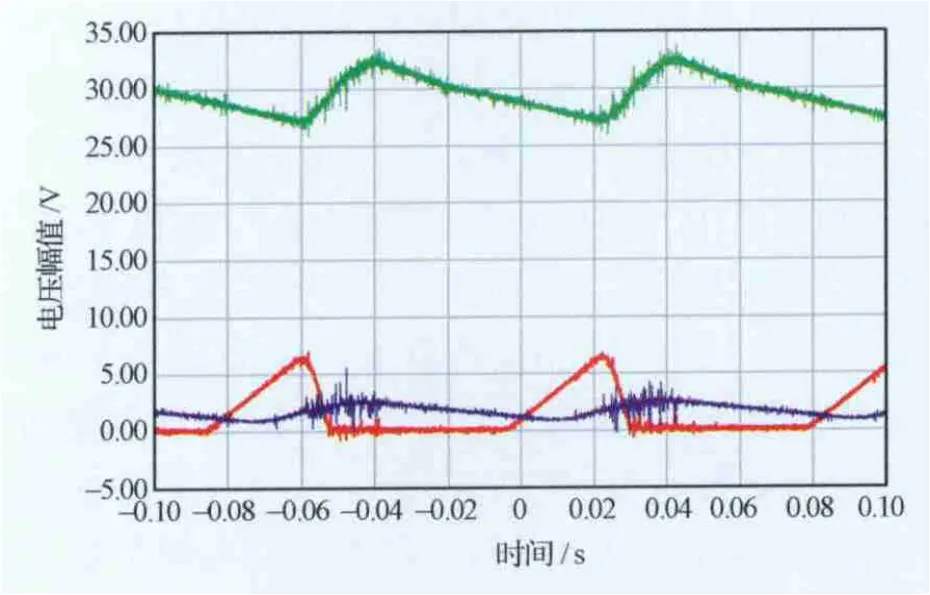
图5 实测放电调节器小负载工作时的母线电压、升压信号、PWM 信号Fig.5 Curve of bus voltage,control signal and PWM signal before equipment improvement
当航天器进影时,太阳电池翼不能供电,此时放电调节器控制蓄电池供电,但处于小负载工作模式。PWM 控制信号与升压控制信号之间存在16ms的延迟,即放电调节器存在过长的延迟。参考上一节分析结果,大响应延迟的存在会严重影响放电调节器的稳定性,导致系统不稳定。为解决这一问题,根据分析结果,将放电调节器中存在的响应延迟时间缩短,将PWM 控制信号与升压信号之间响应时间降低到5ms以内。电路更改后,地面测试时航天器进影后母线电压如图6所示,稳定在28.42V,使母线电压大幅振荡的问题得到解决,系统恢复稳定状态。
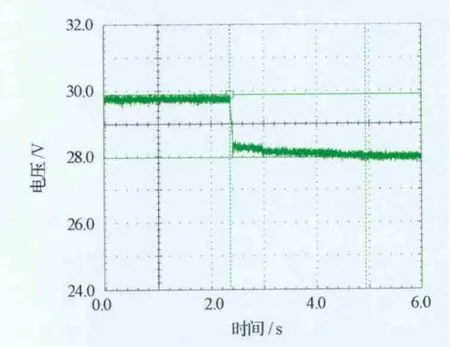
图6 单机更改后放电调节器工作时母线电压Fig.6 Curve of bus voltage after equipment improvement
地面验证进一步验证了在进行航天器一次电源放电调节器的设计时,应将系统中存在的响应延迟降低到5ms以下,以保证其稳定工作。
5 结束语
本文就某载人航天器在轨飞行进影时母线电压存在振荡的不稳定这一现象,推导了用于分析放电调节器稳定性的数学模型。在此前提上,进行了载人航天器放电调节器稳定性的分析。分析得出,系统中存在过大的延迟会降低航天器放电调节器的稳定性,系统响应延迟时间小于5ms是保证放电调节器稳定工作的最低要求,此分析结果通过某载人航天器地面测试得到了验证,可为其他航天器放电调节器的稳定性设计提供参考。
(References)
[1]Ly J H;Truong C.Stability analysis of the International Space Station electrical power system[C]//Proceedings of the 1999IEEE International Conference.New York:IEEE,1996:62-633
[2]帕特尔.航天器电源系统[M].韩波,译.北京:中国宇航出版社,2010.8:60-70 Patel M R.Spacecraft power systems[M].Han Bo,translated.Beijing:China Astronautics Press,2010:60-70(in Chinese)
[3]李国欣.航天器电源系统技术概论[M].北京:中国宇航出版社,2008:137-148,1049-1085 LI Guoxing.Spacecraft power system technology[M].Beijing:China Astronautics Press,2008:137-148,1049-1085(in Chinese)
[4]胡寿松.自控控制原理[M].第5 版.北京:科学出版社,2007:40-61,206-217 HU Shousong.Automatic control theory[M].5edition.Beijing:Science Press,2007:40-61,206-217(in Chinese)
[5]裴润,宋申民.自控控制原理[M].哈尔滨:哈尔滨工业大学出版社.2006:11-16 Pei Run,Song Shenmin.Automatic control theory[M].Harbin:Harbin Institute of Technology Press,2006.5:11-16(in Chinese)
[6]徐德鸿.电力电子系统建模及控制[M].北京:机械工业出版社,2005:43-45 XU Dehong.Modeling and control of power electronic system[M].Beijing:China Machine Press,2005:43-45(in Chinese)
[7]张兴,马先奎,张崇巍.推挽式DC/DC 开关电源的设计与校正[J].合肥工业大学学报(自然科学版),2000,23(6):957-961 Zhang Xing,Ma Xiankui,Zhang Chongwei.Design and correction of push-pull DC/DC switching power supply[J].Journal of Hefei University of Technology,2000,23(6):957-961(in Chinese)
[8]Temkin D,Butler M,Dakermainji G.Stability analysis of the STEREO satellite power system[C]//4th International Energy Conversion Conference and Exhibit(IECEC).Washington D.C.:AIAA,2006:26-29