应急保障中部队车队高速行进的安全距离研究
2014-12-25范精明钱立峰
汪 欣,孟 朔,范精明,钱立峰,周 伟
(1.军事交通学院 研究生管理大队,天津300161;2.军事交通学院 训练部,天津300161;3.军事交通学院 学员旅,天津300161)
非战争军事行动具有任务突发性、地域难以预知性、规模不确定性以及任务延续性的特点,尤其是抗洪抢险、抗震救灾、道路抢修等针对自然灾害的抢险救灾行动[1],对部队应急保障的机动性能方面有很高的要求。然而,部队车队在应急保障行进时,高速的行驶必然引发安全隐患。部队车队在高速运行时,前后车之间存在一定的距离,并随着车速、路况和驾驶员状态等的改变而改变,这个距离既不能太大而影响进行速度,又不能太小而影响安全,需要按照一定的安全距离行驶。
1 跟驰特性分析
1.1 车辆跟驰特性
在应急保障时,在限制超车的单车道上行驶车队中相邻两车之间相互作用而形成跟驰状态,跟驰车队中的车辆有如下特性。
(1)制约性。即跟随车的车速不能长时间大于前导车的车速,并且前后车之间必须保持一个安全距离。
(2)传递性。前导车的运动状态变化会引起跟驰车的相应行为,一旦第1 辆车改变运行状态,它的效应将会向后传递至最后1 辆。
(3)延迟性。前后车运行状态的改变不是同步的,后随车运行状态的改变滞后于前车。
通过分析各车辆逐一跟驰的方式,可以建立应急保障中的部队车队驾驶员微观行为与交通流宏观现象之间的联系,车辆跟驰状态如图1 所示。图中,vi表示第i辆车的速度,hi表示两辆跟驰车之间的距离。
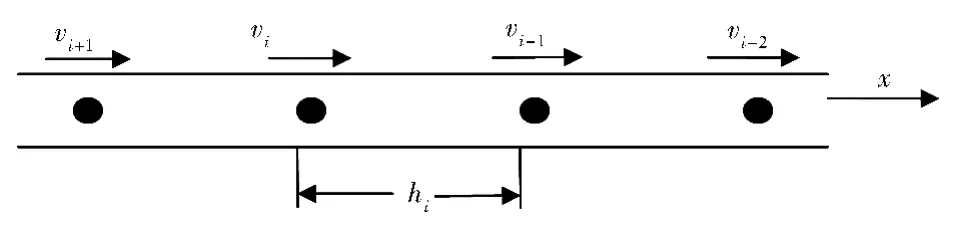
图1 车辆跟驰状态示意
1.2 驾驶员特性
车辆跟驰行为其本质是驾驶员实行一系列连续控制行为的过程。通过分析可以发现,车辆跟驰中驾驶员作为车辆跟驰的控制者,具有3 种不确定性[2]。
(1)驾驶员做出决策和反应的过程中不是精确的,即驾驶员并不能完全地具有任何确定性的行为。
(2)驾驶任务安排与注意力的分配具有“间断性”,这个“间断性”即表现为不同驾驶员驾驶技能的差异。
(3)对前车的加速和减速行为,后车驾驶员随之做出的反应是非对称的。例如,前车加速度以1.5 m/s2时由30 m/s 减至15 m/s 后,又以同样加速度恢复车速为保证跟驰安全,后车驾驶员会将更多注意力集中在减速上,而对于反应的刺激驾驶员的反应是非对称的。即对于对称的刺激,驾驶员做出的反应并不是十分符合实际需求的。
2 安全距离模型
2.1 模型假设
应急保障的部队车队在高速进行中,假设车队满足以下基本条件。
(1)不存在超车行为。一条车道的交通流中,在车间距处于10 ~125 m 的相邻车辆之间存在着可以定量描述的影响关系。
(2)前后车之间有排斥。前车会对跟驶车产生排斥,这种排斥与前车速度、跟车速度以及两车间距有关系。
(3)实际速度的选择。在跟驰状态下,跟驰车辆驾驶员决定他的实际行车速度。
2.2 跟驰的稳定性
在实际情况下,车队在行进过程中前车的车间距偏差会沿着车队繁衍到后车而使后车的车间间距偏差增加。考虑到这种情况的出现,需要加入队列稳定性约束,队列稳定性是为了防止首车的速度变化对跟驰的后车的速度影响,从而会引起整个车队的稳定性。文中,将跟驰的车队看作一个线性反馈系统,引入相应的控制理论概念,对于这个系统的稳定性,采用Routh 判据方法来进行分析[3]:
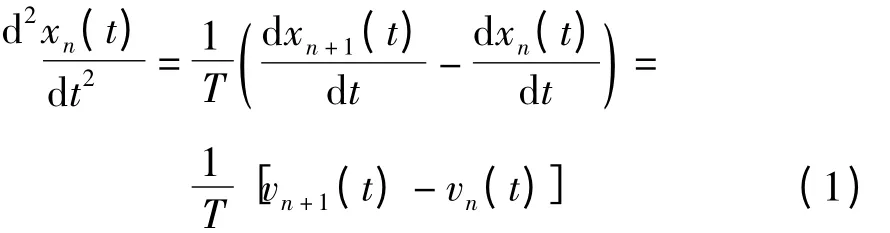
式中:xn(t)为t时刻第n辆车的位置;xn+1(t)为t时刻第n辆车的前面第n+1 车辆的位置;vn+1(t)为前车的速度(系统输入);vn(t)为后车的速度(系统输出),则为t时刻第n辆车的加速度;T为后驾驶员对前车刺激的反应时间。
对式(1)进行拉普拉斯变化,得到跟驰系统的传递函数为

式中s为拉氏变换中的复变量。
为便于分析系统稳定性,现引入一个特例:假设该应急保障的车队中有5 辆车,以第1 辆车的速度作为该系统的输入,以第5 辆车的速度作为系统的输出,由式(2)可通过迭代得,进而递推出表达式:

由此得到闭环传递函数和特征方程分别为

因此可以得到Routh 矩阵见表1。
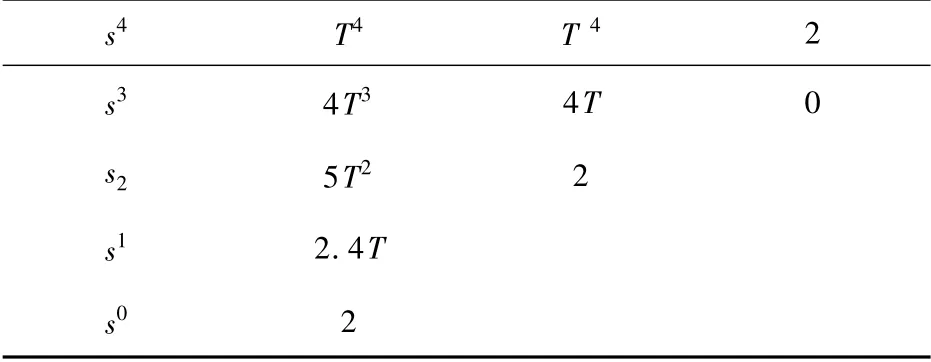
表1 Routh 矩阵
系统稳定的条件是各幂次的系数皆大于0,且Routh 矩阵第1 列皆大于0,解得第5 辆车系统稳定的条件是:T>0。
设第1 辆车按速度v0行驶,为便于分析其速度变化,即可得第5 辆车的输出响应及拉式逆变换形式:

由式(6)可以看出:
(1)当跟驶车辆的期望车速接近前车的均衡速度(即跟驶车辆的均衡车速)时,交通流趋向均衡状态,即会形成稳定流;相反,当跟驶车辆的期望车速与前车的均衡车速相差很大时,交通流将不稳定。即相对较高的前后车速度比使得跟驰更稳定,相对较低的前后车速度比则相反。
(2)车队应该以一定的高速度行驶才能保持车队的整体稳定性。
2.3 驾驶员的影响
在车辆行驶中,驾驶员动视力随车速的提高而下降,车速越快,目标物距离越近,目标出现在驾驶员视野内的时间越短,驾驶员越不容易感知目标,从而使视距变短。
大量的研究证明,驾驶员通过模糊推理控制后车的速度,后车能够以安全距离跟随前车安全行驶[4]。基于驾驶员的实践经验,可发现车辆跟驰中速度的控制实际上是个模糊的过程:如果驾驶员认为相对距离远大于安全距离,而且相对速度大,则驾驶员会以适当大的加速度加速行驶,尽量使相对距离与安全距离的差值为零。驾驶员感知和控制制动的过程如图2 所示。
分析车辆制动过程,可发现由于驾驶员的生理因素,车辆制动过程实际上是由驾驶员的制动反应时间tr、车辆制动协调时间tb和持续制动时间tc组成[5]。这3 个时间的确定方法:tr可根据试验取为560 ms[6],tb由车辆制动系统的性能来确定,tc由车辆的制动力参数求出。因此驾驶员的制动时间可表示为

2.4 安全距离的确定
安全间距随着行车速度、反应时间及前、后车的制动等因素的变化而变化。当跟随车驾驶员及时发现引导车制动信息灯亮,随之制动,直至停车。通过分析跟驰的过程,可得出高速行驶时车队的安全距离为

式中:vm为跟随车制动前的初速度,这里可以认为等同于跟驰车队行驶的速度;L为停车后前导车与跟随车间的安全距离;af为跟随车的制动加速度;al为前导车的制动加速度。
在这里,跟随车制动前的初速度vm等同于跟驰车队行驶的速度,受到整个车队稳定性的影响,应有一定的取值范围,至少为60 km/h。这个范围既要保证高速行驶,又要保证前后车之间的相对稳定,也即是稳定性对安全距离的影响所在。
3 安全距离计算
3.1 理论值
按高速公路车道标明的行驶速度,最高车速不得超过120 km/h,最低车速不得低于60 km/h。通过车队高速行驶时的安全距离式(8),可以计算高速行驶中的不同速度条件下(60 ~120 km/h)对应的安全距离。
例如,当车队行驶速度按100 km/h 行驶时,根据式(8),vm取2.67 m/s,tr取0.5 s,tb取0.15 s,tc取0. 25 s,L取3 m,af取6. 86 m/s2,al取6.50 m/s2,可以得到安全距离Hs=55.57 m。
依此类推,其结果归纳见表2。

表2 高速行驶中前后车之间的安全距离
3.2 与实际值的对比
参考有关部队机动的行车手册[7],例如高速行驶时,车速超过80 km/h 时,一般应控制在30 ~40 m。将本文的计算值与规定中的不同行驶速度下的距离值与对比,如图3 所示。

图3 安全距离的求解值与规定值对比
由图3 可以看出,在车速低于90 km/h 的速度段,规定值明显大于本文的求解值,而高于90 km/h 速度段,规定值小于本文的求解值。主要原因:在车速低于90 km/h 时,跟驰车队应侧重于稳定性,此速度下通过判据所得到的距离相对于规定值较小;而在超过90 km/h 的高速行驶中,应考虑到有关环境因素,如大雾天、下雪天、路面结冰、暴风骤雨、夜晚行驶等行驶条件,此条件下由于驾驶员反应时间的影响,造成实际制动时间增加,从而制动距离变大,因此实际行驶中应在规定的基础上,适当增加车辆间的距离,以确保安全。
3.3 车队编队的最佳规模
根据相关规定[7],高速行驶时,整个车队之间的距离应掌握在1 ~3 km。假设在不利于行驶的特定条件下,整个车队距离取最大值3 km,运送应急物资的车辆平均长度5 m,根据研究可以发现,应急保障中,部队车队高速进行中的车队编配数目存在一个最佳规模值,这个值可以按照如下思路计算:最佳辆数= 车队距离最大值/(该速度下车辆间的安全距离+车辆长度)+1 。通过计算,不同速度对应的车队最佳规模见表3。

表3高速行驶中前后车之间的安全距离
4 结 语
应急保障的特点是输送距离远,运送量大,车队高速行驶中的安全控制很重要。本文将反映前后车传递性的稳定性用于跟驰模型,引入Routh 判据的方法来分析前车状态变化对后车的影响,进而分析了系统的稳定性,然后结合驾驶员的影响因素,得到了高速行驶中的车队安全距离计算方法,并进行了实例分析,得到了特定条件下车队编队的最佳规模,对应急保障中部队车队的管控有一定的参考价值。
[1] 周超.联勤分部利用高速公路组织部队实施快速机动应注意把握五个问题[J].汽车运用,2007(12):24-25.
[2] 王文清,王武宏,钟永刚,等.基于模糊推理的跟驰安全距离控制算法及实现[J].交通运输工程学报,2003,3(1):72-73.
[3] 吕长乐,贾立功. Routh-Hurw itz 稳定性判据在车辆动力学分析中的应用[J].铁道车辆,2002,40(5):14-15.
[4] 何平,王鸿绪.模糊控制器的设计及应用[M].北京:科学出版社,1997.
[5] 徐杰,杜文,孙宏.跟随车安全距离的分析[J]. 交通运输工程学报,2002,2 (1):101-104.
[6] 张殿业.驾驶员驾驶行为测试技术及安全可靠性研究报告[R].成都:西南交通大学,1999:1-24.
[7] 总后勤部,总参谋部. 部队摩托化机动运输保障规定[M].北京:总后勤部,总参谋部,2006.
