我国探月工程三期再入返回飞行试验获得圆满成功
2014-12-25宗河
2014年10月24日,我国在西昌卫星发射中心用长征-3C改二型运载火箭成功发射了我国探月工程三期再入返回飞行试验器(又称嫦娥-5飞行试验器,简称试验器)以及卢森堡-4M小卫星,把试验器准确送入近地点209km、远地点413000km的地月转移轨道。该试验器的主要用途是突破和掌握探月航天器再入返回的关键技术,为嫦娥-5任务提供技术支持。卢森堡-4M小卫星主要用于验证卫星长效电池工作情况。11月1日,试验器在内蒙古四子王旗预定区域顺利着陆,它标志着我国探月工程三期首次再入返回飞行试验获得圆满成功。这是我国航天器第一次在绕月飞行后再入返回地球,使我国成为继苏联和美国之后,成功回收探月航天器的第三个国家,表明我国已全面突破和掌握了航天器以接近第二宇宙速度的高速再入返回关键技术,为确保嫦娥-5任务顺利实施和探月工程持续推进奠定了坚实的基础。
链接:
为了不被地球引力拉回来,试验器飞往月球时必须以接近第二宇宙速度飞出去,返回时的速度和飞出去的速度基本一样。所以,如果返回器在从月球返回地球时直接再入大气层着陆很容易摔毁。因为再入速度太快,大气层的气动阻力不足以抵消这个高速返回的试验器。采用跳跃式返回方式,由于增加了返回器在大气层的“一出一入”,所以可延长试验器在大气层飞行的轨迹,消耗掉返回器的部分能量,并能减小着陆速度,以便选择降落区域。苏联和美国探月时也曾利用过类似原理着陆,但其航程没有我国的长,而着陆场比我国的大。由于我国的人口密度大,适合充当降落区的地点有限,这对返回器的降落精度也提出了更高的要求。
1 任务背景
2013年12月,嫦娥-3任务圆满完成后,我国探月工程全面进入“绕、落、回”三步走发展规划的第三期,计划于2017年前后执行嫦娥-5任务,实现月球无人自动采样返回。为了突破和掌握月球探测器再入返回地球的关键技术,我国决定先期实施再入返回飞行试验,即发射试验器飞抵月球附近后自动返回,在到达地球大气层边缘时(距地面约120km),以接近第二宇宙速度和半弹道跳跃式再入,最终在内蒙古中部地区以伞降形式着陆。跳跃式再入是指航天器进入大气层后,依靠升力再次冲出大气层,以便降低速度,然后再次进入大气层。本次试验任务以获取相关数据为主要目的,首次采用了半弹道跳跃式再入返回技术,用于对未来嫦娥-5返回的相关关键技术进行试验验证。
与“神舟”飞船返回舱以大约7.9km/s的第一宇宙速度返回不同,未来嫦娥-5的返回器将以接近11.2km/s的第二宇宙速度返回。考虑到我国内陆着陆场等各方因素,为实现长航程、低过载的返回,嫦娥-5的返回器将采用半弹道跳跃式再入返回地球。通过这种特殊的返回轨道可以降能减速,因为采用半弹道式再入返回有利于控制,使落点精确;而通过跳跃式弹起然后再入,可以拉长试验器再入距离,达到减速的目的,确保返回器返回顺利。但它对控制精度提出了极高要求,如果返回器“跳”得过高,飞行器会偏离落区;如果返回器“跳”不起来,则可能会直接坠入大气被烧毁。由于距地面60~90km的高层大气变化无穷,受到昼夜、太阳风、地磁场等多种因素影响,大气变化误差很大,所以需要返回器的制导、导航与控制系统具备很大的包容性。
如果采用弹道式再入返回,返回器的再入角较大,从而导致高过载和高热流,这不仅会对返回器的结构强度和防热层提出更高的要求,而且超出了人类的过载承受能力,无法用于将来实现载人登月后的返回。采用跳跃式再入不但能将过载减小,防止高热流,而且还可以改变再入轨迹,延长再入路径。对于以接近第二宇宙速度进入地球大气层的航天器来说这种方法最为合适,可以减少发热和着陆点误差等。此外,如果主着陆场遭遇天气突变,需要临时调整着陆场,也能通过这种再入方式调整再入路径,让返回器落到备用着陆场。

试验器在轨飞行示意图
返回器采用半弹道跳跃式再入返回示意图
不过,即便采用半弹道跳跃式飞行的特殊降落轨迹,返回器的“回家之路”仍有很多未知因素。以第二宇宙速度返回地球是未来嫦娥-5月面采样、月面上升、月球轨道交会对接、再入返回四大关键技术中最难的一项。因为其他三项可通过在地面上做模拟试验的方法来验证可靠性,而高速再入返回的过程无法通过地面模拟得到充分验证。比如,在地面难以模拟11.2km/s左右的飞行速度,模拟高层大气的真空度和化学反应也十分不易。从距地面约120km高进入大气层时,这个高度的大气非常稀薄,不是连续的气流,而是分子气层,所以会产生一系列特殊的气体效应。此外,在大气层中超高速飞行会对返回器产生烧蚀,其程度也比以往要高得多。目前,我国从单纯的地面实验积累的对地球大气特性的认识还不充分,对返回器高速返回条件下的气动、热防护、高速返回的制导导航与控制系统物理模型和数学模型掌握的也不完全,所以风险很大。
再有,我国现有的载人飞船和返回式卫星的着陆模式都无法满足需求。由于返回器返回地球时的速度会越来越快,不但进入大气层时的姿态需要精确调整,而且对再入角控制的精度要求也非常高。
因此,针对探月三期月面自动采样返回任务中返回再入速度高、航程长、峰值热流密度高、总加热时间长和总加热量大等特点,为了确保嫦娥-5任务的成功,这次我国先通过试验器进行真实飞行,开展返回再入飞行试验,验证跳跃式返回再入这一关键技术,获取月球探测高速再入返回地球的相关轨道设计、气动、热防护,以及制导导航与控制等关键技术数据,从而对此前的研究、分析、设计和制造等工作进行检验,为嫦娥-5执行无人月球取样返回积累经验,为探月三期正式任务奠定基础。
本次任务技术新、难度大、风险高,需要攻克气动力、气动热、防热,以及半弹道式制导导航与控制系统等关键技术。气动力和气动热是返回器的关键问题之一,因为研究表明,再入的速度提高1倍,再入热量就将提高8~9倍,以第二宇宙速度再入大气层时摩擦会产生巨大的热能,所以必须做好返回器的热防护设计。
2 器舱组合
此次试验任务由试验器、运载火箭、发射场、测控与回收四大系统组成。其中试验器由中国空间技术研究院研制,它包括结构、机构、热控、数据管理、供配电、测控数传、天线、工程参数测量、服务舱推进、回收,以及制导导航与控制11个分系统。
试验器由服务舱和返回器两部分组成,总质量为2t多,返回器安装在服务舱上部。其服务舱以嫦娥-2绕月探测器平台为基础进行适应性改进设计,具备留轨开展科研试验功能;返回器为新研制产品,采用钟罩侧壁加球冠大底构型,质量约330kg,具备返回着陆功能,与探月三期正式任务中返回器的状态基本一致。
试验器有六方面的创新,即轨道设计和控制、新型的热控技术、气动、高精度的返回制导导航与控制,以及设备的轻小型化和回收技术。
在质量、体积大幅减少的情况下,试验器性能不降反升,这是由于它广泛使用了大量高智能化、高集成度、小型化产品。比如,新开发的小型星敏感器是一款“会思考、能自主决策”的高智能产品。依托嵌入在产品中小型智脑,该星敏感器能把提取的星图与智脑中存储的海量数据进行比对、分析,从而在苍茫的宇宙中找准自己的位置、坐标,对试验器在太空的自由驰骋进行姿态控制。除了“智商”高之外,该星敏感器的“情商”也不低。它能自如地应对太阳光、星体反射光等恶劣空间环境的挑战,快速做出一系列应急响应,在精度控制上更是达到了国际领先水平。

试验器进行热真空试验
在8天的“地月之旅”中,绝大部分时间服务舱载着返回舱前进。只有最后的约40min,返回器再入返回地球。所以,服务舱一路上不仅要“开车”,还负责给返回器供电、供暖、数据传输和通信保障等。舱器分离就是剪断连接舱器之间的一捆电线,4个爆炸螺栓炸开,服务舱要用力把返回器推到再入返回走廊,而自己也要避让。
服务舱装有5台相机,用于对试验器的地月之旅进行拍照。相机采用了新材料以实现轻小型化,质量最大的有4.1kg,最小的只有200g。它们有的是技术试验相机,有的是鱼眼镜头相机。这些相机也可拍视频,为便于传输,一段连续视频不超过30s。其上的第二代CMOS相机是把轻量化做到极致的一款产品,每台相机只有巴掌大小,质量不及一个苹果重,却集光、机、电、热等多项先进技术于一身,具有长寿命、高可靠、自动拍摄、实时图像压缩,能应付恶劣太空辐射、温度环境,能承受发射时的强烈冲击和振动等高强本领。
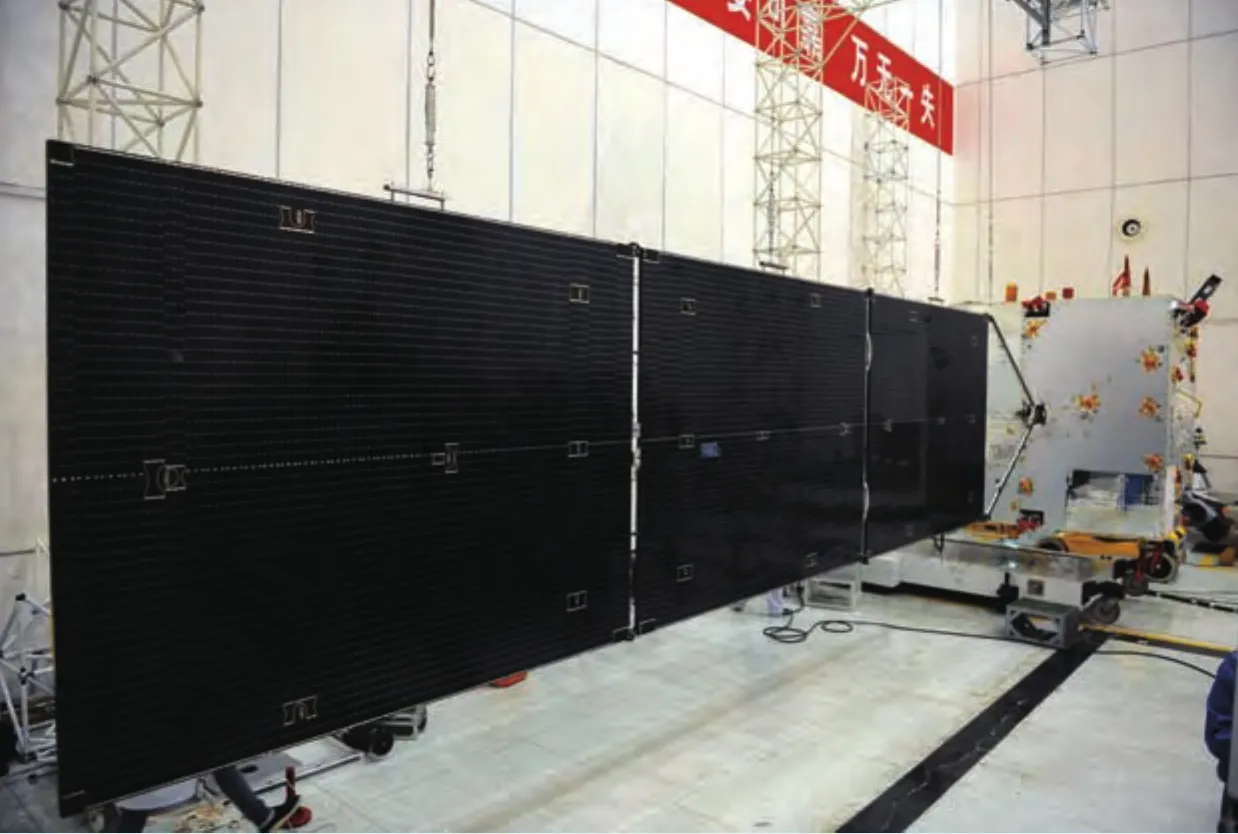
服务舱进行太阳电池翼展开试验
试验器的返回器虽然比“神舟”飞船的返回舱小许多,但是它“麻雀虽小五脏俱全”,其法兰和焊缝的数量一点不比飞船返回舱少,因而难度要高出好几个量级。一般情况下,每颗卫星只进行一次整星热试验,而此次返回器的热试验总数量不下10余次。
返回器在返回大气层时受到气动作用,会产生各种各样的力和力矩。为了使返回器自身的气动特性具有稳定性,气动专家做了很复杂的计算,进行了大量的风洞实验,最后根据这些实验数据,选择了钟鼎形作为返回器的外形设计。
返回器的造型比较独特,是一个底面直径和高度都只有1.25m的锥形体,其小小的“身躯”在热试验中的加热分区有多达32个。由于它分区多,接口多,而且构型不规则,所以给红外加热笼的设计制造带来很大难度。加热笼与舱体之间的安全距离需精确把握,如果离得太远,加热笼带条加电后辐射温度难以满足高温要求,达不到预期试验效果;如果离得太近,舱体部分位置可能超出温度承受上限,容易造成表面损伤。为此,采取了三维设计与热分析仿真相结合的方式,用5片红外加热笼拼合包裹大底、5片红外加热笼拼合覆盖侧壁的方案,从而顺利完成了返回器红外加热笼的量身定做,确保了热试验有效进行。
返回器上首次应用了国产宇航级环路热管。目前,世界上拥有同类核心技术的只有美国、俄罗斯和法国。在返回器外部还包覆一层特殊材料,它可以把摩擦产生的热量隔绝掉,不让它灌入舱内。
由于返回器降落时的速度非常快,不可能依靠地面遥控来指挥。为此,专门开发了半弹道跳跃式飞行的制导导航与控制系统技术,让返回器能自主控制,这是再入飞行的关键。返回器在降落过程中的微小变动都可能带来影响,例如,在第一次进入大气层时,返回器表面会因为高温烧蚀使其外形和质量发生改变,因此在第二次进入大气层时,返回器就必须考虑到这些因素进行自动调整。
制导导航与控制系统的任务是把返回器准确带回着陆场。制导是根据当前飞行情况找到一条路径;导航是准确知道位置;控制就是让返回器怎么走到这条路径上来。在返回器“回家”的整个控制过程中,最大的困难就是大气环境的不确定性。高空大气密度变化范围有±80%,低空大气密度变化范围是20%~40%。进入大气层后,制导导航与控制系统要实时对气动参数、大气密度进行辨识、仿真、计算。这些必须在极短的时间内完成,制导、导航与控制系统经受了极大考验。
返回器的防热设计也是这次试验的重要科目。为了应对与大气层超高速摩擦带来的高温问题,专家们已开发了多项热防护技术。此外,返回器的特殊需求也为热防护技术带来了难题。例如,在太空时,返回器内部的电子设备工作会产生大量废热,需要被及时排出;而再入大气层时正好相反,返回器外壁与空气摩擦产生的上千度高温需要隔绝。这些难题均已通过新型防热材料和结构克服了。
在此次任务实施中,月地返回、半弹道跳跃式高速再入返回、返回器气动外形设计、返回器防热设计,以及验证半弹道跳跃式再入制导、导航与控制和轻小型化回收着陆技术等六大技术难点是决定任务成败的关键。这次飞行任务验证了探月三期的六项关键技术。
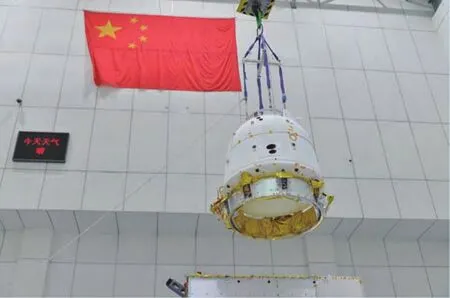
吊运返回器
一是验证了返回器气动外形设计技术。利用飞行试验获取的数据对返回器气动设计的正确性进行了验证,通过数据分析比对,修正了返回器气动设计数据库。
二是验证了返回器防热技术。通过飞行过程中防热结构温度变化历程,对防热结构设计进行了评估,提高了热分析的准确性,测量了返回器热蚀情况。
三是验证了返回器半弹道跳跃式高速再入制导、导航与控制系统技术。
四是验证了月地返回及再入返回地面测控支持能力。针对返回器高动态、散布范围大、跟踪捕获难等特点,综合开展了总体设计、分析和试验。
五是验证了返回器可靠着陆技术。利用返回器内侧、外侧、遥测和气象数据,对返回器可靠着陆技术进行了验证。
六是验证了返回器可靠回收技术。通过返回器搜索回收,验证了空地协同搜索回收工作方法,同时具备了地面独立搜索能力。
3 飞行过程
试验器采用绕月自由返回轨道,在经过了发射段、地月转移段、月球近旁转向段、月地转移段、返回再入段和回收着陆段6个阶段,飞行大约8.4×105km,时间长达8天4h30min的飞行过程后,在内蒙古四子王旗着陆。在任务实施期间,我国远望号测量船队、国内外陆基测控站,以及北京飞行控制中心和西安卫星测控中心,共同组成了航天测控通信网,为任务提供了持续跟踪、测量与控制。这次任务的完成实现了四大技术突破:高速的气动力、气动热技术;高热量、大热流的热防护技术;高精度、高动态的制导导航与控制技术;长距离、大范围的再入回收测控技术。
发射段
发射段是指从运载火箭起飞开始到器箭分离为止的飞行阶段。2014年10月24日02:00,试验器在西昌卫星发射中心发射,通过运载火箭直接送入绕月自由返回轨道入口点,进入地月转移轨道。

试验器飞行的6个阶段示意图
地月转移段
地月转移段是指从器箭分离开始到试验器到达距月球约6×104km的影响球边界为止的飞行阶段。
10月24日16:18~16:29,在北京航天飞行控制中心的精确控制下,对距地球约1.3×105km的试验器成功实施了地月转移轨道的首次中途修正。这是因为在飞行过程中,试验器会受到入轨偏差、万有引力、宇宙环境等因素影响,所以需要实施中途修正、校正航向。通过认真分析和精确计算,北京航天飞行控制中心研究确定了再入返回飞行试验任务的首次中途修正控制策略,并成功向试验器注入控制参数,顺利实施了首次中途修正,为试验器顺利到达月球近旁奠定了基础。在这次中途修正前,北京航天飞行控制中心控制试验器携带的相机,拍摄了试验器远离地球的飞行场景。
10月25日16:18~16:29,对试验器实施了第2次中途修正。经过2次中途修正后,已经把火箭入轨偏差的影响消除了,达到了要求的轨道精度,所以取消了原定的第3、第4次中途修正。
10月27日11:30,试验器飞抵距月球6.0×104km附近,进入月球引力影响球,结束地月转移轨道段的飞行,开始月球近旁转向段的飞行。
月球近旁转向段
月球近旁转向段是指从试验器进入月球影响球开始到试验器飞出月球影响球为止的飞行阶段。试验器在该段借助月球引力改变自身相对地球的轨道倾角,环绕月球进行转向飞行。
10月28日03:00,试验器到达距月面约1.2×104km的近月点。随后,在北京航天飞行控制中心控制下,试验器系统启动多台相机对月球、地球进行多次拍摄,获取了清晰的地球、月球和地月合影图像。
拍摄地月合影绝非想象的那么简单。地球和月球之间本身相隔3.8×105km。此外,地球和月球二者之间大小也相差悬殊。要想拍出好的地月合影,要充分考虑到2个夹角和相应的匹配关系,一是太阳、地球和试验器的夹角以及太阳、月球和试验器的夹角;二是相机的视场角与太阳、地球也要有相应的匹配关系。
为了找到最美拍摄角,拍出地球、月球比例“般配”的“全身照”,试验器要先飞到月球,再往远离地球、月球的方向飞出去约1.0×104km,然后要避开太阳光直射,最后选好一个合适角度,才能按下快门。为了能拍出这组大片,专家们可是下了不少功夫,对历史上地月合影的相关资料进行搜索整理,并根据此次任务试验器的飞行路线,反复计算,优中选优,从而选定了最佳拍照角度和拍照时间。

试验器拍摄的月地合影
拍摄地月合影的相机有3台:1台只有2个火柴盒大小的微型CMOS相机、1台巴掌大小的CMOS相机,以及1台足球般大小的双分辨率相机。这3台相机总质量不及1台“长枪”单反相机重,但都是集光、机、电、热等多项先进技术于一身,具有长寿命、高可靠、自动拍摄、实时图像压缩,能应付恶劣太空辐射、温度环境,能承受发射时的强烈冲击和振动等高强本领。特别是双分辨率相机,它可在同一时刻、同一位置拍出两张不同分辨率的照片,即按下一次快门的同时得到一张全景照、一张特写照。
为了确保试验器不错过“最美”景色,专家们准备了两套拍摄方案。第一套方案是在测算地月光亮程度的基础上,取二者所需曝光度的中间值进行拍摄;另外一套方案则是用相机分别对地球和月球进行成像,再进行后期组合,最终得到一张清晰的地月合影。双管齐下,可确保“最美”地月合影完美呈现。
10月28日19:40,试验器完成月球近旁转向飞行,离开月球引力影响球,进入月地转移轨道,飞向地球。
月地转移段
月地转移段是指试验器从飞出月球影响球开始到舱器分离(舱器分离点距地面约5000km)的飞行阶段。试验器在该段根据需要完成中途修正,同时完成返回器与服务舱分离的准备工作。
10月30日,在原定第5次中途修正的位置进行了第3次中途轨道修正。
返回再入段
返回再入段是指返回器从距地面约5000km分离后到返回器弹射开伞的飞行阶段。

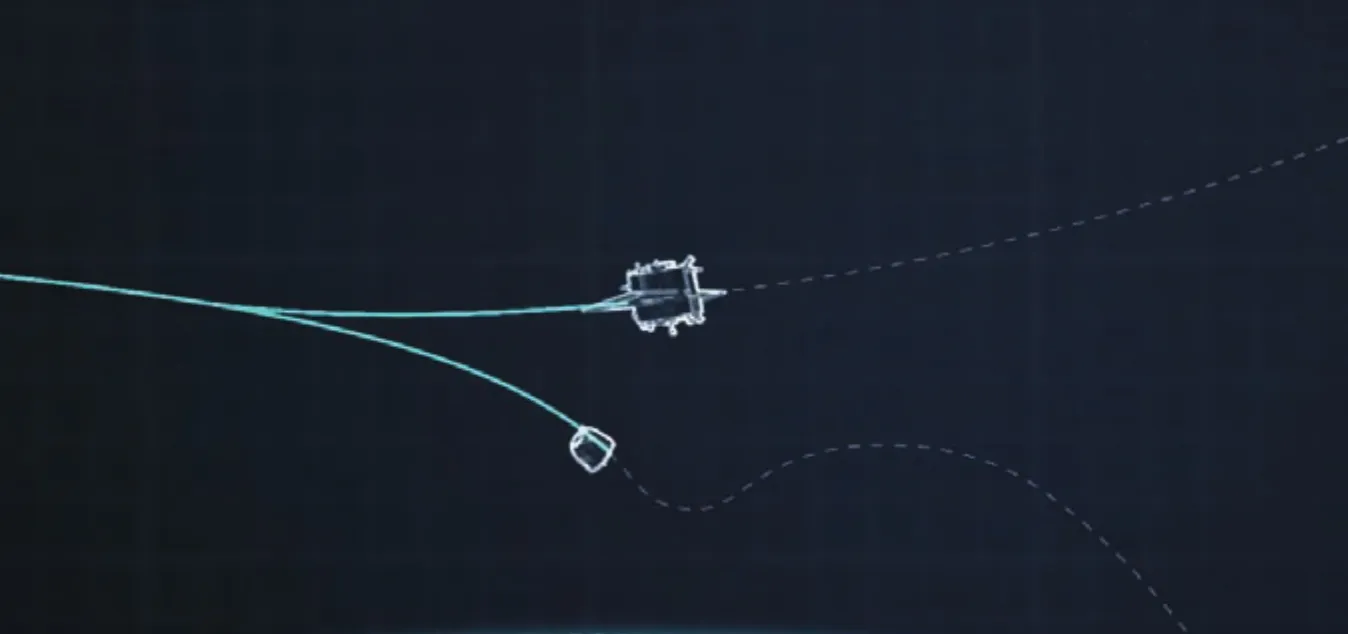
返回器在轨飞行示意图
11月1日05:00,北京航天飞行控制中心通过地面测控站向试验器注入导航参数。05:53,服务舱与返回器在距地面高约5000km处正常分离。在分离过程中,服务舱照明灯开启,服务舱的监视相机A、B对分离过程进行拍照监视。舱器分离后,服务舱上的490N发动机点火进行规避机动。返回器在该阶段首先滑行飞行,06:13,以再入姿态和接近第二宇宙速度进入大气层,实施初次气动减速。下降至预定高度后,返回器向上跃起,“跳”出大气层,到达跳出最高点后开始逐渐下降。接着,返回器再次进入大气层,实施二次气动减速。在降至距地面约10km高度时,返回器降落伞顺利开伞,在预定区域顺利着陆。担负搜索回收任务的搜索分队及时发现目标,迅速到达返回器着陆现场实施回收。其具体过程如下:
1)滑行段。舱器分离约3min后,为确保返回器安全,服务舱按照地面科技人员预设程序开始调姿,约8min后开启发动机,进行了规避飞行。这是因为舱器分离时的速度达10.8km/s,接近第二宇宙速度,而且服务舱在返回器之前,如果不实施规避机动,可能会发生碰撞,对返回器造成巨大威胁。接着,返回器进入了自由飞行状态,它飞过南大西洋,从印度洋上空沿着预定轨道向着祖国大陆飞来。
2)初次再入段。06:11,返回舱建立返回再入姿态。06:13,在距离地面约120km高处,返回器进入初次再入段飞行,返回器自主完成制导导航与控制,实施初次气动减速。
3)自由飞行段。06:17,返回器“跳”出大气,以惯性姿态自由飞行。
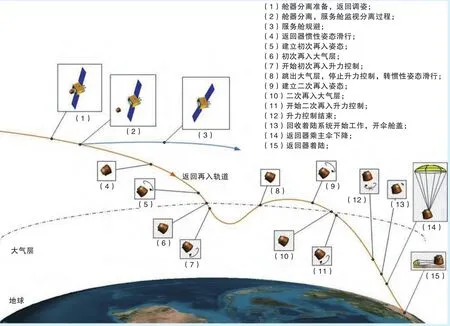
试验器返回再入段和回收着陆段示意图
4)二次再入段。06:23,返回器再次进入大气,自主完成制导导航与控制,实施再次气动减速。06:27,返回器第二次飞出黑障区,建立开伞姿态。06:31,在距地面10km处,升力控制结束,压力高度控制器接通开伞信号,弹开了伞舱盖。
与嫦娥-1、2、3发射后就瞄准月球轨道不同,对试验器的测控从一开始就瞄准了11月1日再入返回地球这一核心任务。为控制轨道精度,北京航天飞行控制中心对星敏感器、返回器惯性测量单元进行了若干次标定。
这是我国航天器首次采取半弹道跳跃式返回,试验器返回着陆区时对飞行测控的要求非常高。由于受运载能力和航程所限,所以对返回器再入点参数精度要求非常高。如果把地球比作一个篮球,返回器再入角就相当于一张薄纸,返回器必须穿过薄纸这样的缝隙,才能安全返回地球。由于返回再入走廊非常窄,再入角只能有±0.2°的误差。如果再入角过小,试验器就不能返回地球;如果再入角过大,不能实现第一次的弹出,会越过既定的防护设计,所以大于或小于这个角度,都不能正常返回,这就要求对轨道的控制能力必须很高才行。
采用半弹道跳跃式再入返回,弹道误差一般比一次性返回的误差大,返回时一方面需要高精度的控制返回器准确进入返回走廊,另一方面要实时预报返回弹道,引导地面站及时有效地捕获返回器。
返回器两次高速进入大气层都会产生“黑障”现象。高速摩擦会使返回器表面气化,产生等离子鞘,屏蔽返回器与地面的联系。虽然在“黑障”过程中天地通信会中断,但返回器不会失控,因为一些重要指令在进入“黑障”之前就已经注入返回器,返回器可以按照预设内容来执行指令。
回收着陆段
回收着陆段是指返回器从弹射开伞开始到着陆并成功回收为止的飞行阶段。
06:42,返回器安全着陆。科研人员将对回收后的返回器及此次再入返回飞行试验获得的数据进行深入研究,为优化完善嫦娥-5任务设计提供技术支撑,服务舱将继续在太空飞行,并开展一系列拓展试验。
4 其他亮点
运载火箭
这次发射试验器的长征-3C改二型火箭采用了“天基测量”技术,即通过数据中继卫星向地面技术人员传输火箭飞行过程的实时遥测数据,这种新技术相当于给火箭配备了“实时问诊器”,可对飞行中的火箭进行全程实时测控。此发火箭还首次采用了最新的高码率传输技术,它如同“宽带传输”,可增加测量点、提高数据传输速度、增大数据传输量(由2Mbit/s提升到5Mbit/s),进一步降低测控盲区;它与“实时问诊器”一起,可保证地面技术人员即时掌握火箭的飞行动态。此次发射对运载火箭有两大考验:一是入轨精度要求高,火箭要将试验器准确送到绕月自由返回轨道“入口”;二是在试验器与末级火箭分离后,末级火箭也会跟着试验器进入绕月自由返回轨道,并再入返回地球,末级火箭再入速度快、落点散布大,会给末级残骸的落点预报和安全防护带来极大困难。为此,返回首次利用火箭剩余能量实现了末级轨道修正,在确保试验器安全的基础上,将火箭末级由绕月自由返回轨道机动到一条绕地飞行的大椭圆轨道上,解决了末级再入地球可能带来的安全问题,同时也达到了火箭末级钝化的目的。

长征-3C改二型火箭发射试验器
长征-3C改二型是长征-3C增强型火箭的首次亮相出征。与长征-3C基本型相比,它还有一些改进、创新。例如,首次在长征-3C火箭上使用双激光惯组+卫星导航复合制导的技术。事实表明,在双激光惯组的基础上,增加卫星导航修正装置,能够保证试验器入轨精度的万无一失。从外形上看,它的第一级芯级火箭增高了1.5m,2个助推器加长了0.8m,运载能力由原来的3.8t提高到3.9t。同时,火箭第二级发动机采用了我国可靠性最高的长征-2F运载火箭第二级的发动机,为此次试验任务提供了更为强劲的运载能力和更高的飞行可靠性。
测控回收
这次任务对飞行控制最根本的要求是确保试验器安全再入返回,得到完整的实验数据;最大的挑战之一是完成对试验器的精确控制;最核心的难题之一是试验器半弹道跳跃式再入返回轨道的控制与应急处置。为确保这次飞行试验飞控任务的顺利完成,北京航天飞行控制中心应用三站联合接力跟踪测量,新建的深空干涉测量中心也首次实时参加任务,从而满足了再入返回时高精度轨道的要求;先后完成了76套各类方案、预案的研制工作;突破和掌握了高精度的绕月自由返回轨道定轨及预报、高精度的轨道控制、跳跃式返回过程预报与引导,以及高密度测控协同与动态规划调整等多项关键技术。北京航天飞行控制中心有针对性地开发了“任务计划智能编辑系统”和“双目标计划自动拼接软件”,有效解决了指令计划编辑困难、易出错和多目标指令编排交叉重叠的问题。有了这两个智能“小帮手”的帮助,为试验器安排工作就变得既安全可靠,又高效快捷。
这次探月任务大大小小的故障预案多达144个。为此,北京航天飞行控制中心有一个叫做“故障快速诊断系统”的软件,用于试验器快速“体检”。这套“体检”系统包含遥测快速处理、信息快速监控和故障快速诊断3个软件,快速、高效是它们的最大特点。相比以往任务,这次任务“体检”进入了快时代。
在这次任务中,北京航天飞行控制中心顺利实现了4项关键技术的突破,航天测控能力有了新的提高。
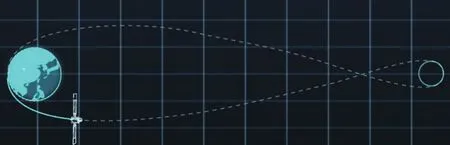
试验器采用“8”字形的绕月自由返回轨道
一是高精度的绕月自由返回轨道定轨及预报技术。由于采用了全新的绕月自由返回轨道,所以对定轨和预报精度的要求很高,而且这次任务轨道控制次数多、姿态机动频繁,影响轨道测量精度的因素复杂。北京航天飞行控制中心模拟了各类误差进行仿真打靶分析,设计制定了适用于各个阶段的数据使用原则和定轨策略;研究制定了利用圣地亚哥、玛斯帕拉玛斯和纳米比亚三站接力跟踪、联合测轨的实施方案,实现了定轨和预报的高精度要求。
二是高精度的轨道控制技术。在这次任务中,3次中途修正控制均瞄准再入点,其控制策略、轨控模式、约束条件等,均较以往任务变化较大。对此,北京航天飞行控制中心研究设计了以瞄准再入点参数为目标的全新中途修正算法,制定了通过组合修正实现航程调整、入轨异常等情况下的应急控制策略,设计了抬高服务舱轨道近地点等规避方案,解决了基于绕月自由返回轨道的策略规划和应急控制这一难题。
三是跳跃式再入返回过程预报与引导技术。由于实施半弹道跳跃式再入返回,所以返回器上的制导控制方法复杂,气动影响预测难度大,产生风险的因素很多。为此,北京航天飞行控制中心结合返回器制导原理,利用返回器气动参数制定了落点预报与引导实施方案;并与试验器研制单位密切协作,开发了弹道预报的计算方法和软件,确保了返回预报和引导的顺利实施。
四是高密度测控协同与动态规划调整技术。由于这次任务发令密集、控制频繁、环环相扣,所以需实现快速灵活的飞控任务动态规划,以确保两器之间、天地之间的高度协同控制。北京航天飞行控制中心通过对各次关键控制的飞控计划、测控资源及实施流程进行了统筹和优化,对各类关键指令设计了预备计划发送和人工判发的备保措施,并利用自动追赶发令、双目标修正发令、多源遥测比判等手段,实现了飞控快速应变和动态规划能力。
在此次飞行试验中,由于返回器目标小、再入速度快、落点散布范围广,所以给着陆场搜索回收带来了很多新的考验,特别是此次试验无气象备份着陆场。试验器发射升空后,回收时间随即确定。即使回收任务当天着陆场区气象条件不满足直升机起飞条件,无法实现“空地联合搜索”,也要由地面分队独立完成搜索回收任务。
为了确保返回器搜索回收任务圆满完成,从今年8月开始,着陆场区前置雷达站、地面测控站、气象台人员就陆续进场展开工作,先后4次组织综合搜索回收演练,熟练掌握了返回器回收处置的各种技能。在试验器再入返回时,着陆场区的跟踪测量、搜索回收、通信保障、气象保障等系统装备工作正常。
5 多个第一
这次任务实现了我国航天的多个“首次”。首次让航天器从月球回到地球;首次成功采用半弹道跳跃式再入返回技术;首次突破了第二宇宙速度再入情况下的一些防热技术;首次验证了在大范围内的小目标搜索能力,因为返回器的体积只有“神舟”飞船返回舱的1/8;首次采用了“8”字形的绕月自由返回轨道,这种特殊设计巧妙地利用了地球和月球引力,使试验器飞抵月球附近后能绕半圈自动改变轨道方向、轨道倾角向地球飞来,从而节省了中途轨道修正所需的推进剂,借助月球引力完成转弯并返回地球;首次应用了深空探测可视化系统,等等。
首次再入返回飞行试验的圆满成功,为全面完成探月工程“绕、落、回”三步走战略目标打下了坚实基础,对我国月球及深空探测乃至航天事业的持续发展具有重大意义。
