印度将于2017年执行第二次月球任务
2014-12-25李虹琳中国航天系统科学与工程研究院
李虹琳(中国航天系统科学与工程研究院)
印度2008年首次成功发射月船-1后,着手实施月船-2月球探测任务,现计划于2017年前后发射月船-2探测器。月船-2由轨道器、着陆器和月面巡视器组成,由印度独立研发、印度空间研究组织(ISRO)负责管理,将采用印度地球静止轨道卫星运载火箭(GSLV)发射。月船-2探测任务为期2年,预计成本约9000万美元。
1 任务背景和目标
印度在实施月船-1月球探测任务的同时,已着手开展月船-2任务。2007年11月12日,印度空间研究组织与俄罗斯联邦航天局签署了共同开发月船-2任务的协议;2008年9月18日,印度政府批准了该项月球探测任务。按照该任务原定计划,印度空间研究组织提供运载火箭、轨道器和月面巡视器,俄罗斯联邦航天局提供着陆器,2013年完成探测器的研制和发射。
在月船-2任务实施期间,由于俄罗斯未能按时研发着陆器,使该任务不断推迟。2012年,俄罗斯宣布“火卫一-土壤”火星探测任务失败,由于月船-2的着陆器采用了“火卫一-土壤”探测器的部分技术,因而俄罗斯联邦航天局重新评估用于月船-2着陆器的相关技术,并向印方提议修改技术方案以提高着陆器硬件的可靠性。修改方案将导致着陆器质量增加,迫使印度空间研究组织在保证可靠性的前提下降低巡视器质量,这一提议使月船-2任务的技术方案变动较大,印度未接受俄方提议。
2012年5月,印度对自主研制月球着陆器开展了可行性研究,所得结论认为印度能够利用2~3年时间开发出月球着陆器,随后印度空间研究组织对月船-2任务进行了综合评审。2013年8月14日,印度宣布停止与俄罗斯联邦航天局原定的合作,确定自主完成第二次月球探测任务。
月船-2工程目标是验证月面软着陆能力及相关技术。月船-2科学目标是分析月球的起源和演变;通过分析月球土壤/岩石了解月球的化学组成;分析月球大气组成等。
2 探测器介绍
探测器平台
月船-2探测器发射质量2650kg。探测器由轨道器舱和携带巡视器的着陆器舱两部分组成,两个舱段通过一个隐藏的舱段适配器进行机械连接。
月船-2轨道器的基本结构与月船-1相似。轨道器是1.5m×1.5m×1.5m的立方体,发射质量约1400kg,设计寿命2年,携带5台科学有效载荷,其中3台是新研制的设备,另外2台是月船-1有效载荷的改进型。与月船-1相比,月船-2增强了电子器件抗辐射加固和热控系统的性能。
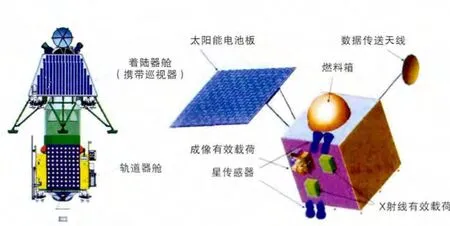
月船-2轨道器构形示意图
(1)着陆器
月船-2着陆器和巡视器质量共约1250kg。最初,月船-2着陆器是由俄罗斯与印度联合开发。当俄罗斯表示即使推迟到2015年也无力提供着陆器时,印度决定独立开发着陆器。着陆器的设计和初步构型研究已经由印度空间研究组织的空间应用中心(SAC)完成。着陆器将携带一套仪器用于研究着陆点的月球表面物质的物理和化学特性。它既可以直接与地面站通信,也可通过轨道器与地面站通信,同时充当巡视器的通信“枢纽”。
(2)巡视器
印度尚未公布巡视器的最后方案。月船-2巡视器质量可能在30~100kg之间(质量大小取决着陆方式等多项因素),设计寿命1个月,具有半自主导航和避障能力,由太阳能电池板提供电能,可对月壤或月岩样品进行原位化学分析,然后将分析数据传送给轨道器,轨道器再将数据传送给地面站。
为确保巡视器安全移动和避障,月船-2巡视器将装备行走系统、导航相机和控制系统等设备。巡视器装有6个轮子,每个轮子均由独立的电机驱动,其中4个轮子具有独立转向能力,共有10个电机用于牵引和转向。巡视器在月面的移动控制由“动态牵引力控制系统”负责,该系统通过控制巡视器4个轮子的独立转向装置,确保巡视器能够越过粗糙的月球面表;巡视器装有多台基于3D成像的立体相机,用于为地面团队提供控制巡视器移动所需的周围地表3D图像。目前,位于坎普尔的印度技术学院(IIT)正在为巡视器开发用于移动的子系统。
有效载荷
月船-2携带的科学有效载荷由印度空间科学咨询委员会主席、印度空间研究组织前主任U•R•拉奥领导的国家专家委员会确定,该委员会成员来自隶属印度空间研究组织的研究中心,印度的科学研究机构和研发实验室。
(1)轨道器携带的有效载荷
月船-2轨道器将运行在200km高的环月轨道,携带的有效载荷主要用于探测月球表面的形态、矿物质及其化学特性、存在水冰的证据以及月球大气成份等。携带的5个有效载荷分别是:
地形绘图相机(TMC-2)由印度空间研究组织空间应用中心研制,该设备是月船-1所携带TMC-1的改进型,用于绘制月表三维图像,这对研究月球矿物质和地质学是必不可少的。
成像红外分光计(IIRS)由印度空间研究组织空间应用中心研制,用于绘制月面图。该设备工作的光谱范围为0.8~5.0μm,空间分辨率为80m(幅宽40km),探测数据可用于对月球阴暗面的火山、玄武岩组成、盆地和局部地区地幔的异质性进行研究,并探测氢氧基和水分子的标记。
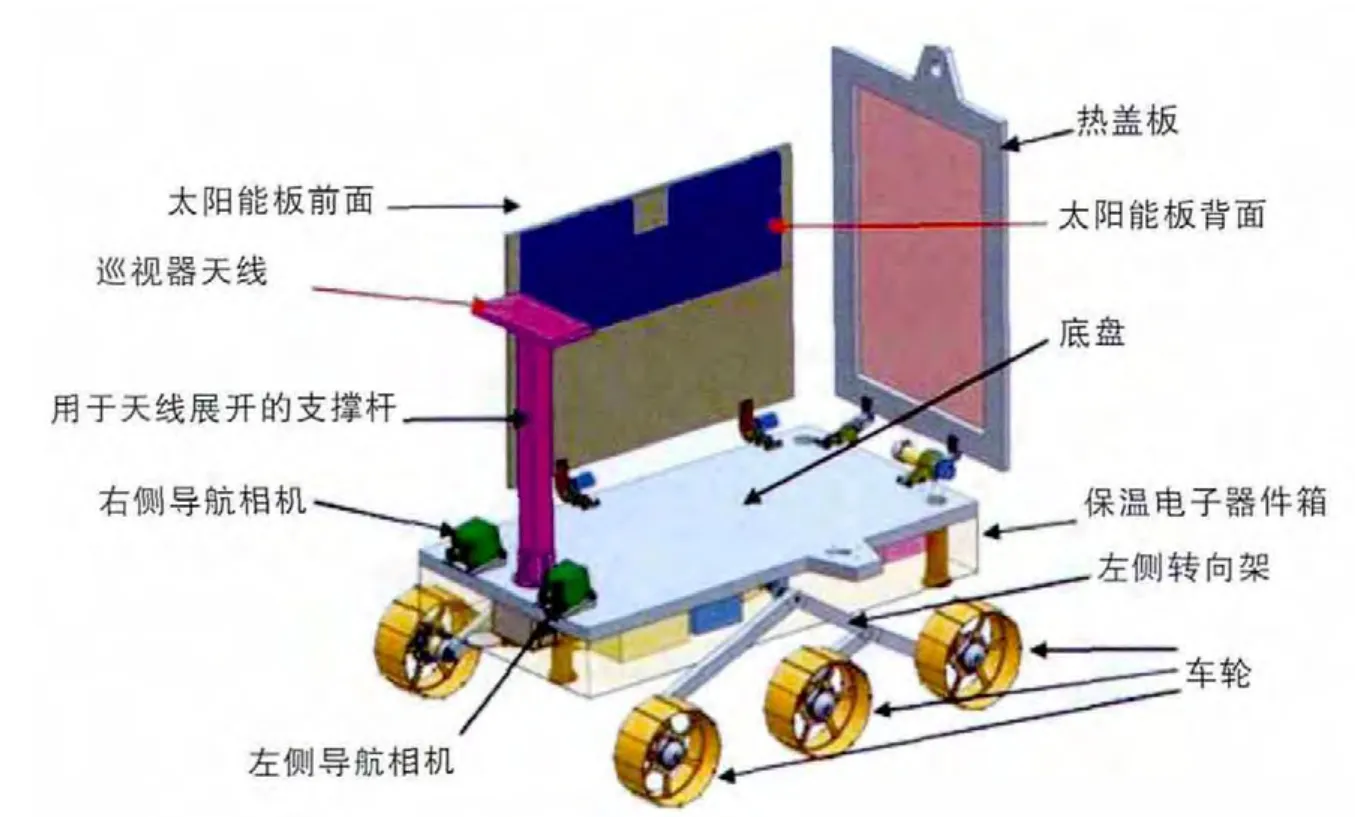
月船-2巡视器的构型图示意图

中性粒子质谱仪-2示意图
合成孔径雷达(SAR)由印度空间研究组织空间应用中心研制,该设备运行在L频段(1.25GHz)和S频段(2.0~2.2 GHz),可选择2m、5m和10m分别率以及10km刈幅扫描,可采用圆形极化模式和线性偏振模式,用于探测月球亚表面层物质及其成分,包括亚表面层的水冰。合成孔径雷达被期望能够提供证实月球阴影区存在水冰的证据。
中性粒子质谱仪(NIMS)由印度空间物理实验室研制。中性粒子质谱仪也称钱德拉大气成分探测仪-2(ChACE-2),是月船-1轨道器携带中性粒子质谱仪的改进型。该设备以四极质谱学技术为基础研制,工作范围为1~300amu(原子质量单位),功率小于30W,质量低于4kg。主要用于研究月球稀薄大气成分与环境,开展月球外大气层的详细研究。
大区域软X射线分光计(CLASS)由印度空间研究组织的卫星中心和物理研究实验室研制,采用硅漂移探测器(SDD),能量1~20kV,探测面积30mm2,功耗6W。主要用于探测月球表面的主要元素(包括镁、铝、硅、钙、钛、铁等)及其分布情况,可提供来自月面极区标称空间分辨率为25km的元素丰度月脉图。
(2)着陆器携带的有效载荷
目前,印度已基本确定的着陆器有效载荷包括月震仪和激光反射器。在考虑着陆器的质量、体积和功率的限制后,再决定是否携带其他的科学有效载荷。
(3)巡视器携带的有效载荷
月船-2巡视器携带有2个科学有效载荷,用于对月表物质进行原位探测。
阿尔法粒子诱导X射线分光计(APXS):由印度物理研究实验室研制。该设备是用于天体元素分析的验证仪器,NASA的“火星探测巡视器”(MER)和“火星科学实验室”(MSL)曾经采用此类设备对火星开展研究。月船-2月面巡视器携带的阿尔法粒子诱导X射线分光计由2个电子包组成,即传感器头部和后部电子器件,主要用于探测月表物质的化学性质。传感器头部的设备包括硅漂移二极管、6个阿尔法源、X射线测量装置和安装在巡视器机械臂上的前段电子电路等。该设备通过阿尔法粒子激发X射线和次级辐射,之后测量从样本中发出的特性X射线,从而分析样品的性质。
激光诱导击穿分光镜(LIBS):由光电系统实验室建造,该设备通过发射激光脉冲探测和分析远处的物质,如用于极地中风化层含水量的测定。

激光诱导击穿分光镜
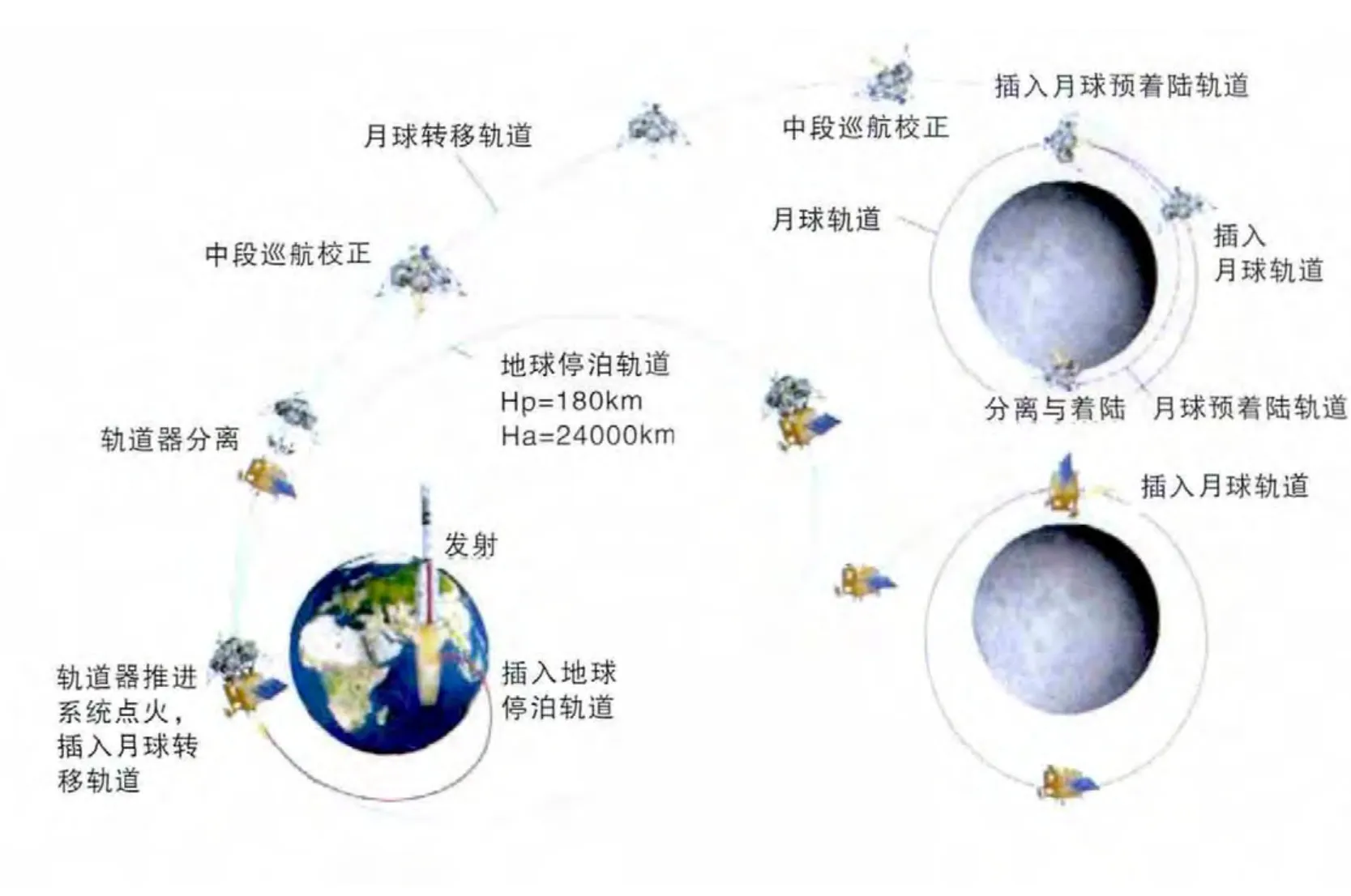
月船-2任务飞行方案
3 任务飞行方案和着陆区选择
任务飞行方案
月船-2探测器由地球静止轨道卫星运载火箭MK-2(GSLV Mk-2)送入地球同步转移轨道,随后通过轨道器携带的发动机提升轨道,最终进入奔月轨道(LTT)。在奔月过程中,月船-2轨道器与着陆器(携带巡视器)分离,二者独自向月球飞行,并分别被月球捕获,进入月球极轨道。轨道器最初运行于5000km×200km的椭圆形极轨道,而着陆器携带巡视器下降到月球表面。着陆器实现月表着陆后,带有机械臂和科学探测设备的巡视器将被释放到月球表面。随后,着陆器与巡视器开始工作,而轨道器将运行于200km的圆形轨道上。
着陆区选择
目前,印度尚未公布确切的着陆区,但从科学探测角度考虑,预计着陆区将优先考虑高纬度位置。根据美国航空航天局月球勘察轨道器(LRO)和日本“月女神”轨道器提供的数据,俄罗斯为印度确定了月球南极附近的2个备选着陆区。主着陆点:87.2°(S)、68°(E),休梅克;备用着陆点:87.2°(S)、68°(E),格拉克。但不排除印度对着陆区进行重新选择。
4 运载火箭
月船-2任务将采用印度自主研制的地球静止轨道卫星运载火箭Mk-2运载火箭发射。该火箭为三级运载火箭,高49m,起飞质量414t,起飞推力为6573kN,有效载荷整流罩最大直径3.4m,可将2~2.5t的卫星送入地球同步转移轨道。火箭一级由S-125芯级固体助推器和4台液体捆绑助推器组成;二级采用可贮存液体推进剂发动机;三级采用液氢/液氧发动机。
5 结语
2008年成功实施首次月球探测任务之后,印度提出了包括对火星、金星、小行星与彗星实施探测的航天发展规划。2013年11月5日,印度“火星船”任务成功发射,目前正在飞往火星的途中,这使印度在深空探测领域又向前迈进了一步。此次提出的月船-2探测任务,以月船-1任务为基础,主要验证印度实现月球软着陆的能力,为今后印度月球及其他行星探测任务奠定技术基础。
