基于双频超声波技术的导盲实验设计
2014-12-24刘雪林史湘伟薛德宽黄兴洲陈文娟
刘雪林,张 旭,史湘伟,薛德宽,黄兴洲,陈文娟
(中国石油大学(华东),山东 青岛 266580)
超声检测是声学专业的一个比较重要的研究方向,超声波测距是一种非接触式检测方式,具有不受光及电磁波等外界因素干扰,检测范围广,检测灵敏度高,方向性好,成本低等优点,因而得到广泛应用。随着电子技术的不断成熟与发展,各机构研制出了很多电子导盲设备,帮助盲人解决行走不便的问题。中国科学院声学研究所通信声学实验室在“产品功能区创新成果展馆”展出了研制的超声波导盲仪能够提供前进路上1 m到5 m范围内的障碍物识别预警服务[1]。但由于空气对超声波的吸收与超声波频率的平方成正比,因而测距中所用的超声波的频率不能很高,而频率越低,相应的波长越长,测距的相对误差也越大,所以测量距离远和测量精度高产生矛盾。在教学实践的基础上,引入了双频超声波测距技术,可扩大探测距离,从而设计出同时具有大量程与高精度的导盲系统[2-6]。
1 测距原理
1.1 超声波的相关概念
超声波是指频率高于20 KHz的机械波,具有直线传播的能力,常用于距离的测量。利用超声波在超声场中的物理特性和各种效应研制的装置称为超声波换能器或超声波传感器,一般有收发一体式和收发分体式两种结构形式。
超声波测距通常采用回波渡越时间法,检测超声波从超声波发射探头发射经过介质传播后被接收探头接收所需的时间Δt,即渡越时间。
如图1,当超声波发射传感器和接收传感器之间距离很小,即h<<S时,d≈S,则声源到障碍物的距离:

式中:v 为某一温度下的声速。
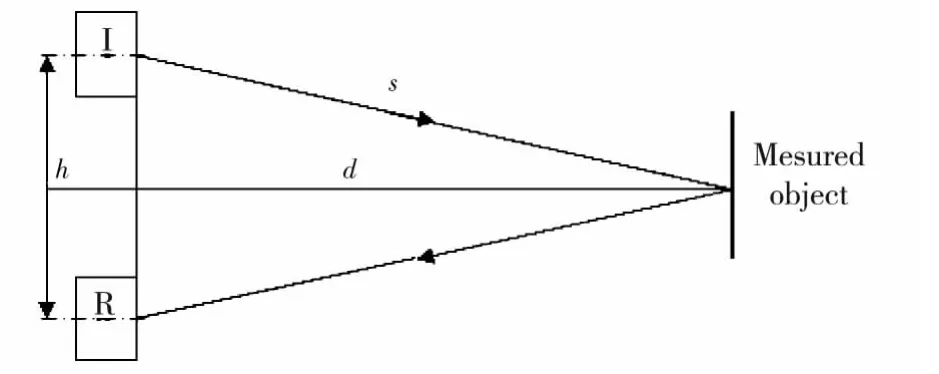
图1 回波渡越时间法原理图
1.2 双频超声波测距的原理
双频超声波测距技术则是在超声波测距技术的基础上做了适当改进,其原理是:利用超声波传感器先后发射两种频率不同的双频超声波,波长短的超声波测量精度高,但由于频率高,空气对它的吸收大,因而适用于近距离测量;而空气对低频的超声波吸收较小,可以到达较远处的目标,用来测量比较远的障碍物,因此保证了在整个测距范围内精度相对一致,从而实现大量程与高精度兼得。
2 实验装置
本导盲系统主要由单片机控制电路,太阳能供电电路,以及报警装置等组成。系统的硬件结构框见图2。
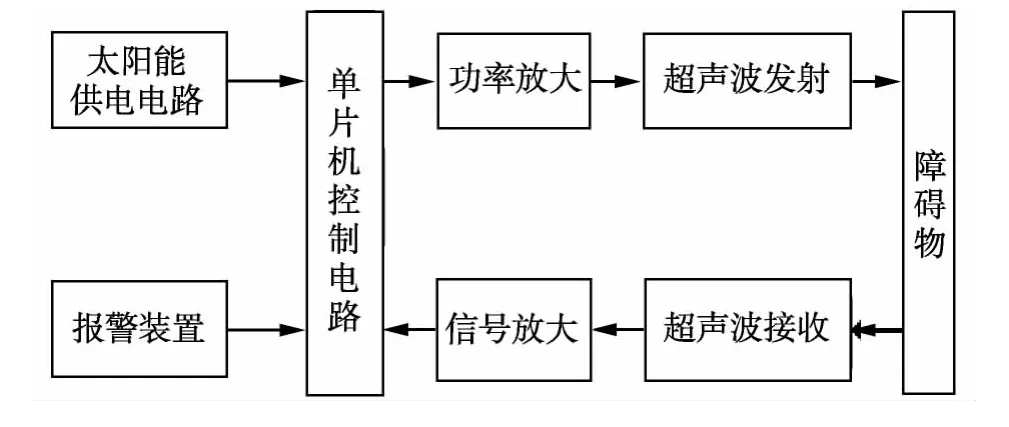
图2 双频超声波导盲仪原理框图
2.1 单片机控制电路
单片机控制电路主要由单片机进行控制,包括超声波发射电路与接收电路,其电路图见图3。
其中stm32f103为单片机,TVG为时间电压增益控制器,PreAmpH和PreAmpL分别为高频通道和低频通道的前置放大器,BPH和BPL分别为高低频通道带通滤波器。
单片机控制电路采用收发一体式的超声波传感器。当单片机接到启动命令后,立即从I/O口发送出一串频率约为40 KHz的高频信号,而后发送出一串频率约为25 KHz的低频率信号,同时计时器开始计时,这两种频率的信号被功率放大后,推动超声波换能器发出两种频率的超声波。发出的超声波遇到障碍物反射后,形成回波,回波经由前置放大、带通滤波及检波后,形成高频回波脉冲和低频回波脉冲。由于高频声波先发出,对同一目标,高频回波脉冲先到达接收器,因此用高频超声波探测近距离的目标;而远处的目标由于高频超声波被空气吸收而大幅衰减,所以回波只有低频声波。回波信号传到单片机后计时器停止计时,通过发射接收超声波的时间差就可计算出障碍物的距离。
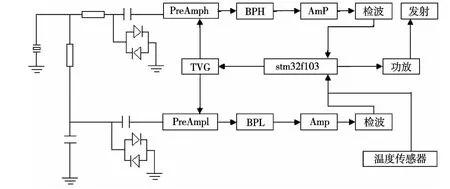
图3 超声波发射接收模块电路图
由于温度对超声波传播的影响较大,因此还必须及时对声速进行修正。空气中声速与温度的关系为:

因此需要在上述超声波发射接收电路中加入一个数字温度传感器Ds18B20,实时检测环境温度,并将通过传感器将测得的温度T转化为一个与其成正比的频率信号f,传至单片机处理后来修正声速,从而使测得的距离更精确。
2.2 供电装置
供电模块由太阳能电池板、太阳能控制器以及可充电的镍氢蓄电池等组成。将太阳能电池板置于导盲仪外部,产生的直流电为主控制电路供电,并将多余电量贮存在蓄电池中。目前常用的太阳能电池为硅太阳电池,其工作原理是:当入射光能量大于硅的禁带宽度时,会在其内部形成电子-空穴对,在结电场的作用下,大部分光生空穴被推到P区,而光生电子被推到N区。随着太阳光的不断照射,光生电子和空穴会在N区和P区不断积累,从而在两侧产生一个稳定的电位差,即光生电动势[7-8]。太阳能供电模块工作框图见图4。

图4 太阳能供电模块框图
2.3 报警装置
报警装置采用HYV040语音芯片,它是一款功能强大的语音编程芯片,抗干扰能力强,性能稳定,具有自动节电控制功能,将导盲仪的所有探测距离需要播放的语音(如“前方障碍物距离为1米”)按不同结果录制好,通过语音芯片配套的语音编程软件直接下载到OTP存储器中永久储存。将经过单片机计算出的障碍物距离传至语音芯片,芯片中的程序根据检测数据的处理结果判断并选择要播放的语音段,并将声音信号送到输出端,通过扬声器来播放障碍物距离。
3 软件设计
该导盲仪的软件设计主要由主程序、超声波发射接收子程序和数据处理子程序等组成,其控制核心为stm32f103单片机。单片机控制超声波传感器先发射10~16个完整波形的高频超声波,然后发射4~8个完整波形的低频超声波,并启动定时器定时,当检测到高频或低频回波时计时器停止计时,读取时间差。同时温度传感器将检测的环境温度转化成频率信号传至单片机以修正声速,从而计算出障碍物的距离。探测结果传至语音芯片,判断并选择要播放的语音段,播放障碍物距离以提醒盲人。其流程图见图5。
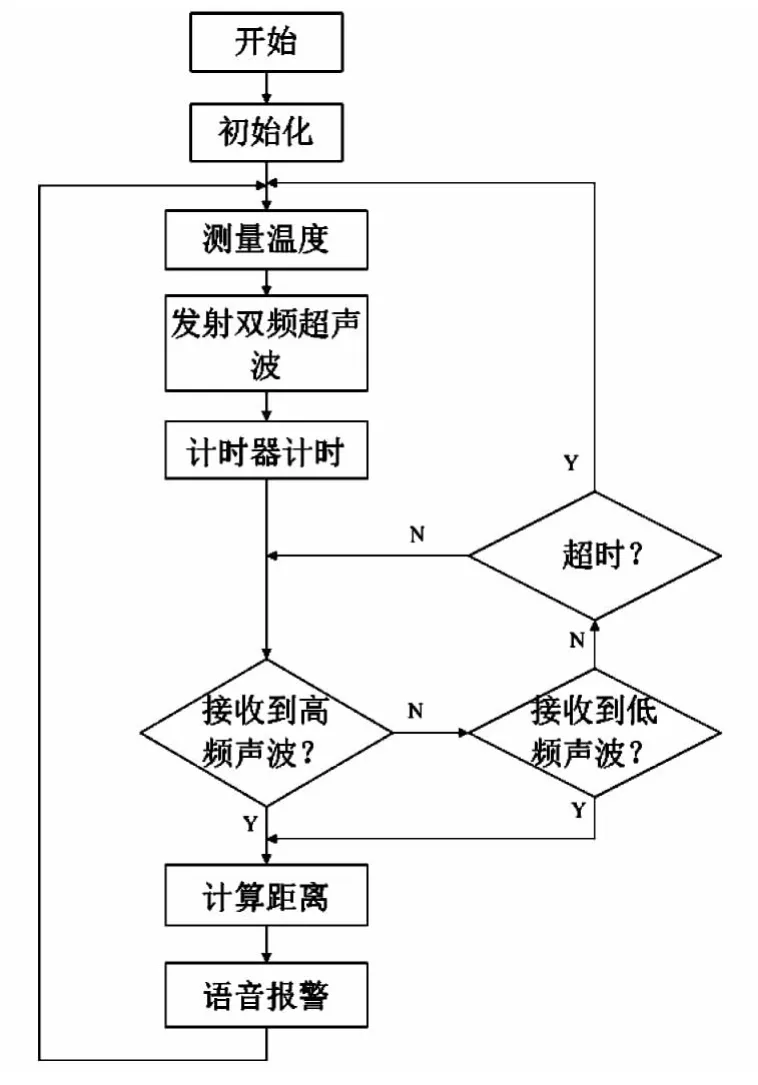
图5 导盲仪工作流程图
4 声场模拟分析
超声波声场即充满超声波的空间,超声场中的声压分布可以反映超声波的声场特性[9-12]。超声波某一点在某一瞬间所具有的压强与超声波声场不存在时同一位置的静态压强之差称为该点的声压。为研究不同频率的超声波传播时的超声场分布情况,用水作为传播介质,采用直径12 mm的超声波换能器,利用matlab软件对不同频率的超声波声场进行仿真,得到的声压分布图见图6。
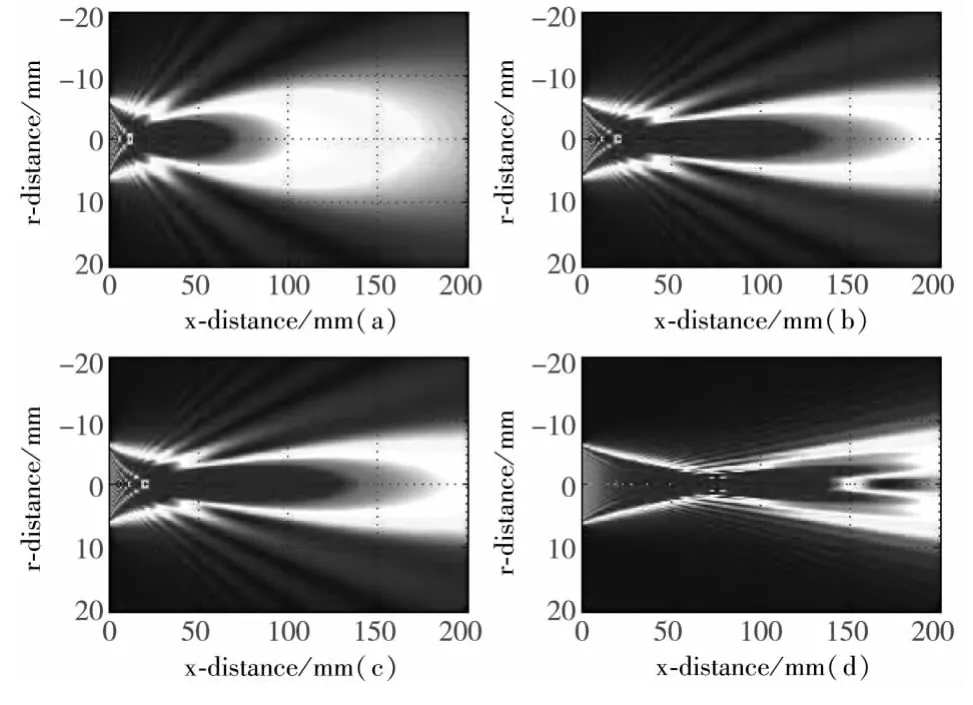
图6 不同频率的声压分布图
从图6中可以看出,频率高的超声波辐射范围小,但声能集中在中心轴线的能力提高,测量精度高,因此适用于探测近处的物体。而频率低的超声波辐射范围广,可以到达远处目标,因此可以用来探测远处的物体。
5 结 论
本导盲系统采用双频超声波测距技术可以将探测距离扩大到十几米甚至二十米,解决了测量范围大与测量精度高的矛盾,实现了大作用距离与高精度兼得的优势。同时,采用太阳能供电,节能环保,报警装置则可以语音播报障碍物距离。该实验可用在声学专业的相关实验课程中,以加深学生对超声波探测技术的理解与应用,极大地提高其动手能力。
[1]王丽丽.电子导盲仪的发展现状与趋势[J].甘肃科技,2012,28(3):99-100.
[2]张旭辉,马宏伟.超声波无损检测技术的现状和发展趋势[J].机械制造,2002,455(40):24-25.
[3]王润田.双频超声波测距[J].声学技术,1996,15(3):116-118.
[4]赵天菲,冯炉,谭昭.导盲拐杖项目[J].中国科技信息,2013(14):134.
[5]孟赟.太阳能电池模拟电源的研究与设计[D].上海:上海交通大学,2008.
[6]Matoshi Hashino,Sho Yamada,K.Miesenberger et al.An Ultrasonic Blind Guidance System for Street Crossings[J].2010,6180:235-238.
[7]张莉.HYV040语音芯片在便携式检测仪中的应用[J].集宁师范学院学报,2013,35(1):113-115.
[8]吴飞斌,张晋平,陈文娟.太阳能超声波导盲器的研制[J].现代电子技术,2011,34(17):137-140.
[9]蒙海英.基于MATLAB的超声波声场模拟及可视化研究[D].大连:大连理工大学,2008.
[10]刘雪林,史湘伟,黄兴洲.超声波测距声场仿真研究[J].现代电子技术,2014,37(5):101-104.
[11]李艳琴.超声波专题实验开展及其传播特性研究[J].大学物理实验,2014(3):87-90.
[12]李志杰,赵骞.超声波声速测量方法的探讨[J].大学物理实验,2012(4):26-28.
