一种综合体配置雷达角伺服跟踪方法
2014-12-24罗春贤
罗春贤
(中国电子科技集团公司 第二十研究所,陕西 西安710068)
0 引言
综合体配置雷达伺服系统在整个综合体中有重要的地位,它是一种复杂的机电综合系统。为了满足任务需求,雷达伺服系统需要具有高动态性能,高稳定性和高跟踪精度。在系统的设计、调试阶段,提出一个合理可行的构架,选用合适的器件,应用软件进行建模、仿真,对样机进行试验验证具有重要意义。
1 要解决的技术问题
随着综合体指向目标未来点时随动系统速度和加速度的大幅提高,复合控制的技术难度增加,具体到跟踪雷达角伺服系统来讲,其需要完成的功能就是驱动天线完成快速调舷、搜索,与电子跟踪通道一起完成对目标的精确角度跟踪;对各级载体摇摆进行有效隔离,使天线轴线在惯性空间稳定。
2 技术方案
以“低频位置跟踪,高频速度隔离”为指导思想进行设计,设计方案如下:
2.1 物理组成
由天线座电气部分和伺服控制电路部分组成角跟踪伺服系统。
天线座电气部分包括方位驱动电机、俯仰驱动电机;方位、俯仰角度敏感装置。另外,天线上装配两个分别用来敏感方位和俯仰角速度的陀螺及配套的陀螺解调装置,陀螺的敏感度高,能有效隔离各级载体的摇摆量。
伺服控制电路部分包括控制组合和功率放大装置。控制组合中包括方位和俯仰的校正电路(数字或者模拟)、角度转换电路、控制输出转换电路、信息处理模块和故障检测模块。
功率放大装置包括功率放大模块,配套的电源装置以及两个分别用于敏感方位、俯仰电机电枢电流的传感器。
2.2 环路设计
角跟踪伺服控制环路设计成三环嵌套系统:内环为电流环,中环为速度环,外环为位置环,原理框图见图1。其中速度环是以速率积分陀螺为传感器构成的空间速度环即陀螺环。
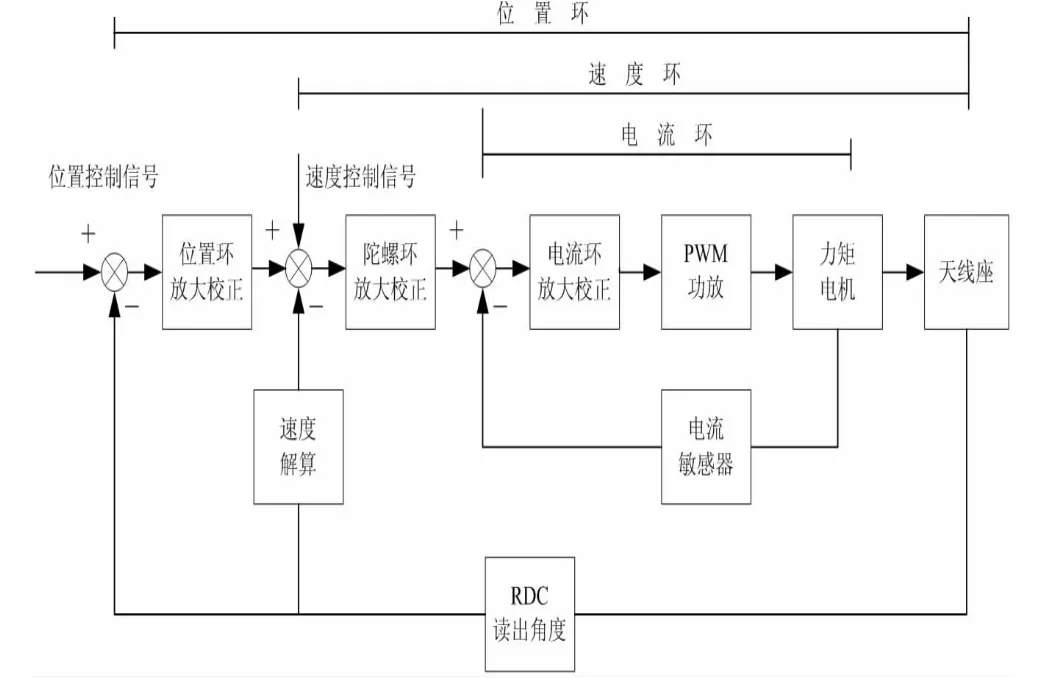
图1 伺服方位或俯仰控制环路原理框
电流环由驱动电机电枢回路﹑PWM功放﹑电流敏感装置及电流环校正放大环节组成。电流环的结构框图如图2所示。

图2 电流环结构框图
陀螺环由速率积分陀螺及其解调电路、陀螺环校正放大环节、电流环组成。陀螺环的结构框图如图3所示。

图3 陀螺环结构框图
3 具体实施方式
3.1 主要器件的选择和模块电路设计
1)根据雷达加速度指标方面的要求分别计算出天线方位和俯仰的总负载力矩,并选用合适的直流力矩电机分别作为方位和俯仰的驱动电机,并与各自驱动轴同轴安装。
2)功率放大模块采用具有过流保护功能的PWM功放模块,指标要求如下:开关频率2kHz;输出连续工作电流10A;峰值电流 ≥50A。
3)天线上的陀螺使用液浮速率积分陀螺。采用液浮速率积分陀螺为传感器构成跟踪雷达伺服系统的空间速度环是一种很好的设计选择,这样设计的速度环具有增益高、频带宽、稳定刚度大、静态误差小的特点。
4)选用直接套天线轴安装的双通道旋变发送机来作为角度敏感装置,实时输出方位和俯仰角位移。
5)方位、俯仰校正电路均采用模拟校正实现对陀螺环、电流环的比例积分、比例微分放大校正;陀螺环的校正放大环节中设计有带阻滤波器,滤波器抑制频带中心频率与天线座的机械谐振频率相同;电流环的反馈支路也设计有带阻滤波器,抑制频带中心频率设在了PWM功放的切换频率上。另外校正板上还有由功率运放实现的陀螺力矩电流产生器。
6)信息处理模块主要对伺服系统内部和外部的各种信息进行处理。由微处理器、译码控制器、高速RAM、高速EPROM、驱动器和PC机通讯使用的仿真头及其外围电路组成。
7)角度转换电路由两片分别用来转换来自方位、俯仰旋变的模拟信号RDC芯片和与之对应的读、写电路组成。电路原理图如图4所示。

图4 角度转换电路原理图
8)将故障检测设计为在线检测和非在线检测两种方式。
对陀螺电源信号、功放检测信号处理成一直流电平后,与故障门限电平同时进入比较器进行比较,比较后得出该信号的故障码,供处理器实时查询,进行在线检测。
由十六选一模拟开关选出需要检测的模拟信号中的一路,进行A/D变换后,由处理器读回数据并与设定的门限比较,进行非在线检测。
9)功放电源由电网滤波器、变压器、整流滤波器组成,如图5所示。

图5 功放电源原理图
4 仿真
4.1 控制环路仿真
1)电流环路设计技术要求为:开环增益 >50dB;闭环带宽 >100Hz;相位裕度 >45°;幅值裕度 >10 dB。
电流环仿真模型如图6所示,开环频率特性曲线如图7,由曲线可得,电流环开环增益59dB,截至频率为140Hz,相位裕度66°。

图6 电流环仿真模型

图7 电流环开环频率特性曲线
闭环频率特性如图8,闭环阶跃相应如图9由以下两图可得,电流环闭环带宽214Hz,超调量4.3%。

图8 电流环闭环频率特性曲线
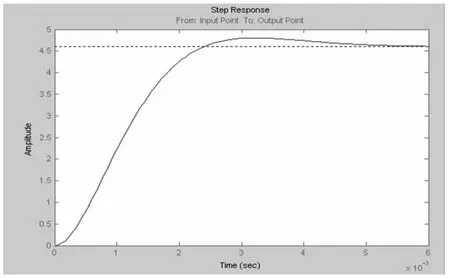
图9 电流环阶跃相应曲线
2)陀螺环路设计技术要求为:开环增益 >60dB;闭环带宽 >12Hz;相位裕度 >50°;幅值裕度 >8 dB。
陀螺环仿真模型如图10所示,开环频率特性曲线如图11,由曲线可得,陀螺环开环增益61dB,截至频率8.8Hz,相位裕度67°,幅值裕度21dB。
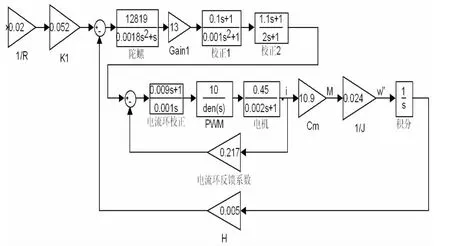
图10 陀螺环仿真模型
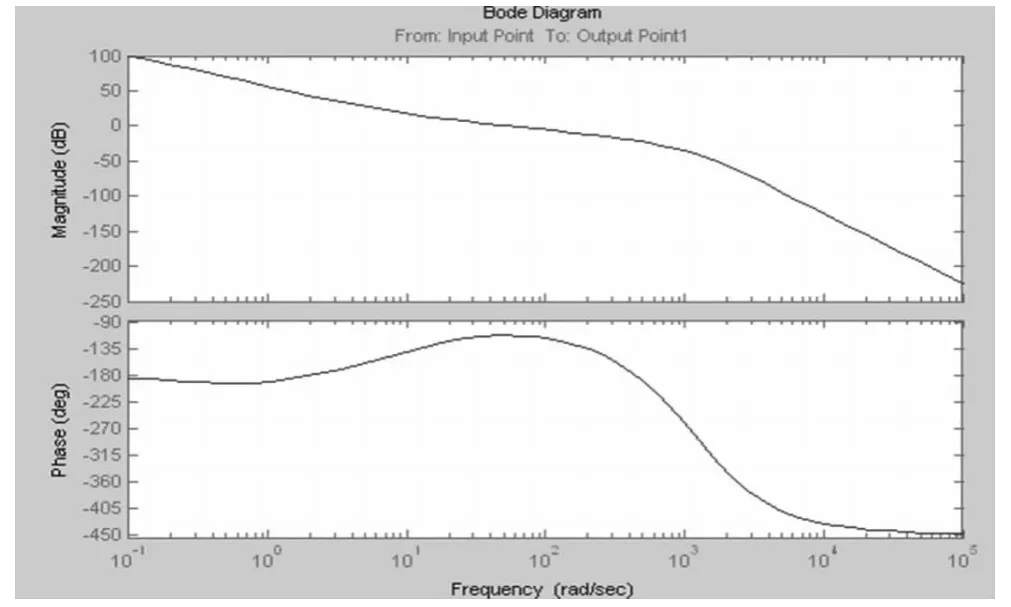
图11 陀螺环开环频率特性曲线
陀螺环闭环频率特性如图12,闭环阶跃响应曲线如图13。由以下两图可得,调节时间0.16秒,超调量为7.5%,闭环带宽12.8Hz。
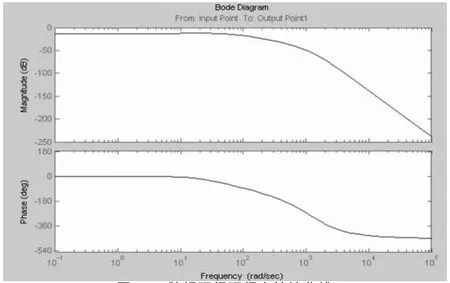
图12 陀螺环闭环频率特性曲线

图13 陀螺环阶跃响应曲线
4.2 效果仿真
4.2.1 扰动试验
对伺服系统的稳定性进进行了载体扰动试验,试验数据如图14,从图中可以看出,跟踪稳定后载体的扰动基本上对惯性空间内的雷达轴线指向没有影响。
4.2.2 模拟跟踪
方位支路跟踪模拟目标,在跟踪角速度和角加速度达到指标要求时最大滞后误差为2.2mrad,如图15所示。
5 结束语

图14 扰动试验数据曲线图

图15 模拟跟踪数据
本文针对复杂的综合体配置雷达对伺服系统的严格要求,设计实现了一种伺服角跟踪装置,在实际运用中已取得了较好的效果。
[1]胡寿松.自动控制原理[M].北京:国防工业出版社,2000.
[2]杨奕飞.复合控制在船载雷达中的实现[C]//2000年航天测控技术研讨会论文集.北京:中国宇航学会飞行器测控专业委员会,2000.
[3]瞿元新.航天测量船测控通信设备船摇稳定技术[M].北京:国防工业出版社,2008.
[4]党瑞荣,等.TMS320C3xDSP原理与应用[M].西安:陕西科学技术出版社,2006.