矿用履带式勘查车辆行驶平顺性试验研究
2014-12-23闫永
闫永
(枣庄科技职业学院,山东滕州277500)
0 引言
履带式勘查车是煤矿安全生产中不可或缺的设备,它的主要功用分为三个方面[1]:1)当煤矿井下发生安全事故时,可以搭载探测设备、数据采集设备和通信设备,利用车辆较强的通过性能在远程遥控的情况下到达现场实施或辅助救援工作;2)对危险巷道进行开采时,搭载常规勘查设备替代人为现场勘测,作为自动化勘测平台使用;3)底盘顶部位可以更换成运输平台,在煤矿日常生产中,利用较大的负载能力辅助搬运设备。
履带勘查车的行驶平顺性是它最重要的性能指标之一,通常车辆中行驶平顺性是指驾驶人员的舒适度,评价标准是质心加速度的大小[2],在本文中研究的是无人驾驶的远程操控车辆,所以将行驶平顺性看作评价车载设备工作性能的指标。
1 试验目的及方法
1)试验目的:试验分析履带底盘的行驶平顺性。车辆的行驶平顺性是衡量车辆性能的一项重要指标,同时底盘行驶平顺性的优劣对车载仪器的工作性能有很大的影响。
2)试验方法:对于履带底盘行驶平顺性试验,因为暂时还没有一个标准的评价履带车辆行驶平顺性的试验方案,所以本试验方案中借鉴轮式车辆的测量方法,让履带底盘以不同的速度通过高100mm的台阶式障碍物,通过测量其不同位置的加速度来分析评估履带底盘的行驶平顺性。
2 试验方案
为试验所搭建的试验台主要由信息采集和分析系统、试验样机以及障碍物3个部分组成。
本试验的测试系统框图如图1所示,它包括加速度传感器、电荷放大器、数据采集分析软件,图2是车辆动态测试试验台。
3 测点布置
对车辆行驶平顺性的测量主要是质心位置的竖向加速度与车辆尾部的竖向加速度[3],如图3所示,根据质心位置以及车辆尾部的竖向加速度来评估车辆的行驶平顺性。

图1 测试系统框图

图2 试验台

图3 行驶平顺性测点
4 试验结果
在平顺的路面上让履带底盘分别以2.5 km/h,5 km/h,7.5 km/h的速度匀速通过100 mm高度的木块,对两个测量点的数据进行采集处理。图4是车辆行驶速度为2.5 km/h时测点一和测点二的测量结果,图5为车辆行驶速度为5 km/h时测点一和测点二的测量结果,图6为车辆行驶速度为7.5 km/h时测点一和测点二的测量结果。

图4 速度2.5 km/h时测量界面

图5 速度5 km/h时测量界面

图6 速度7.5 km/h时测量界面
5 结果分析及结论
对数据进行分析统计,表1和表2分别为车辆质心位置和车辆尾部测量点的极值数据,排除误差数据,当车辆行驶速度为2.5 km/h时,质心位置和车辆尾部的最大加速度分别为18.6 m/s2和23.5 m/s2。图7和图8是测量极值的变化趋势,从中可以发现随着车辆行驶速度的增加,车辆在通过木块时候的最大加速度逐渐增大,这说明车辆在通过木块的过程中行驶速度越大越不稳定[4],出现颠簸感越强,对车身设备的影响越大。

表1 质心位置极值数据
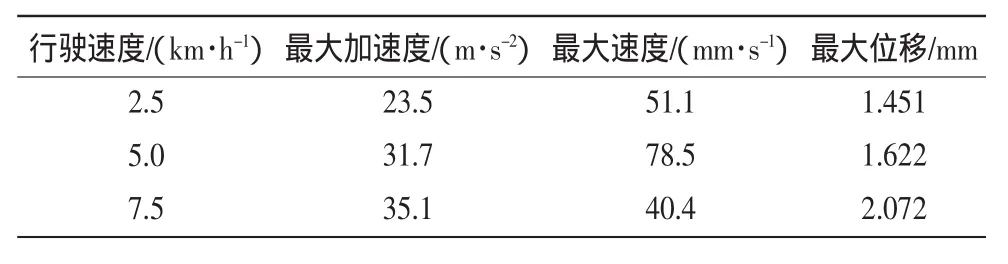
表2 车辆尾部极值数据

图7 质心位置极值变化趋势

图8 车辆尾部极值变化趋势
质心位置相对于车辆尾部的极值加速度较小,这一点也可以反映质心位置的稳定性优于车辆尾部,车辆尾部的最大速度明显大于质心位置,说明尾部行程较大,加速时间较长。
通过试验极值数据可以初步确定车辆的行驶平顺性较差,且较大的速度变化引起的振动会影响到车载设备工作的可靠性[5]。
[1] 王忠民,刘军,窦智.矿难救援机器人的研究应用现状与开发[J].煤矿机械,2007,28(11):6-8.
[2] 王宵峰.汽车底盘设计[M].北京:清华大学出版社,2005.
[3] 曹为,葛世荣,黄俊军.煤矿救灾机器人环境探测多参数传感器设计[J].煤矿机械,2008,29(3):26-28.
[4] 朱志豪,华顺刚,张丽娜,等.履带车辆行驶平顺性仿真及试验[J].光电技术应用,2010,25(2):71-74.
[5] 莫海军,朱文坚.履带式移动机器人越障稳定性分析[J].机械科学与技术,2007,26(1):65-67.
