液力变矩器泵轮内部流动PIV测试与分析
2014-12-23马文星刘春宝
才 委,马文星,刘春宝,袁 哲
(吉林大学汽车仿真与控制国家重点实验室,吉林长春130022)
液力变矩器是车辆和工程机械自动变速系统中的关键部件之一,配备液力变矩器的车辆具有起步平稳、操作方便、可在较大范围内实现无级变速等优点[1-2].液力变矩器是一种依靠液体能与机械能之间的相互转换来传递动力和转矩,与机械传动系统相比效率较低,而提高液力变矩器的工作效率较为困难,其主要原因在于没有掌握和合理利用内部复杂流体的流动规律.为了有效地提高液力变矩器的工作效率,使汽车和工程机械满足动力性、可靠性和经济性的要求,笔者针对透明有机玻璃壳体液力变矩器的泵轮内流场进行PIV测试和试验图像的采集,为深入研究提供参考依据[3].
1 试验设备
整个试验系统主要由机械部分、光学部分、图像采集与显示部分组成[3].
机械部分主要由300 kW电动机、400 kW电涡流测功机和输入输出转矩转速传感器等组成,主要用于驱动、加载和测量转矩转速,模拟液力变矩器的实际工况,机械部分仪器及布置如图1所示.
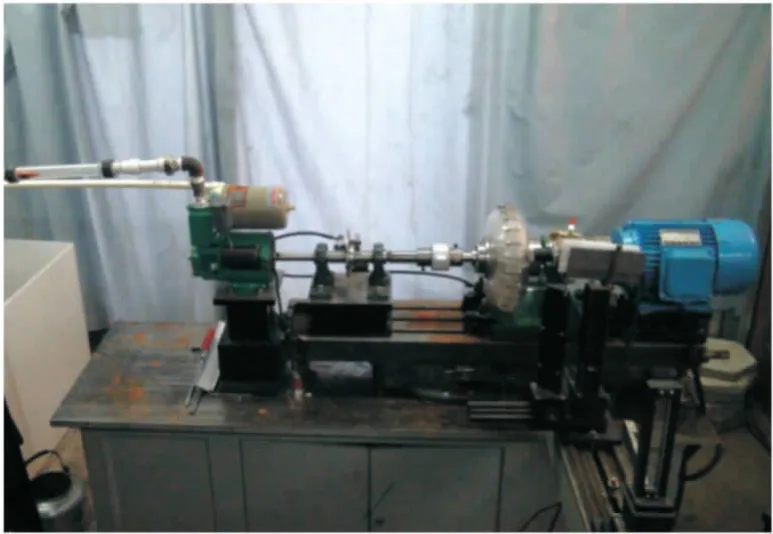
图1 机械部分仪器及布置
光学部分主要由300 mW氩离子激光器、小电动机、光学组件等组成,光学部分仪器及布置如图2所示,主要用于产生连续可调的激光脉冲片光源.

图2 光学部分仪器及布置
激光器采用的是177型风冷氩离子激光器,其输出激光最大功率为300 mW,且连续可调.
小电动机转速为500~1 000 r·min-1,利用小电动机带动脉冲盘可产生脉冲光源.
光学组件由电光源系统、柱面镜和球面镜组成,它将激光脉冲光源转换为激光脉冲片光源,片光源高为50~150 mm,宽为1~10 mm,且连续可调.
图像采集与显示部分主要包括高清CCD摄像机、视频分配器、监视器、图像采集卡及软件等,如图3所示.

图3 图像采集与显示部分
为了能够判断示踪粒子运动轨迹大小和方向,利用脉冲盘将连续的激光分割成3段脉冲片光,在测试采集到的粒子流动图像中就会清晰地呈现出3段.轨迹线最短的表示粒子流速的箭头,最长的表示粒子流速的箭身,次短线表示粒子流速的箭尾,速度方向是由箭尾指向箭头的.
2 泵轮内流场测试方案
2.1 测试机件
液力变矩器泵轮内部流动PIV测试基于LSFM150型激光切面流场测试系统,为了使采集到的图像更加清晰和准确,采用有机玻璃来制作液力变矩器的模型,进而增加模型的透明性.试验的工作液体是水.利用有机玻璃制作的液力变矩器样机如图4所示.

图4 液力变矩器样机
2.2 PIV技术原理
PIV试验系统示意图如图5所示.PIV技术是最基本的流速测量方法,其基本原理既简单又直观[4-11].它是通过测量一段时间间隔示踪粒子的位移量来获得粒子的速度大小和方向[12].脉冲激光束经光学系统形成很薄的片光源照射流场,利用垂直于光平面的CCD摄像机将多次曝光的示踪粒子图像记录下来,通过测量某一时间间隔内粒子在切面上的运动位移量,便可以得到粒子的速度:

式中:Δx为示踪粒子运动位移;Δt为某一时间间隔.
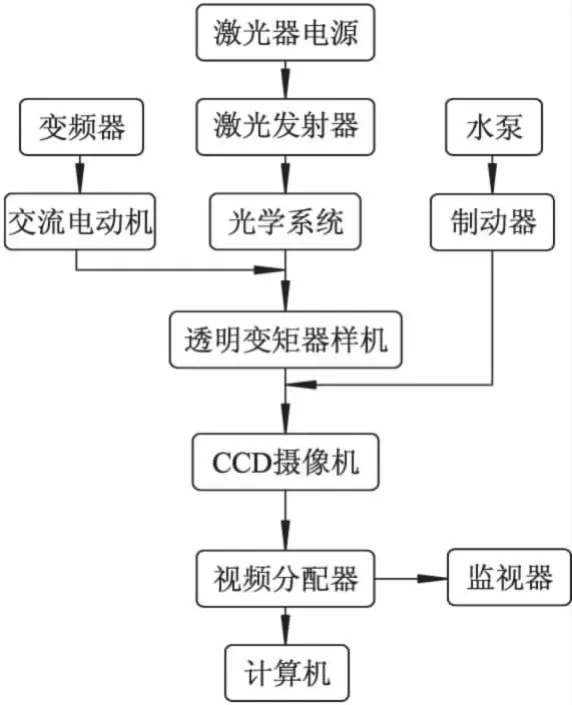
图5 PIV试验系统示意图
2.3 试验方案
PIV试验针对泵轮的内流场而进行,测得多组不同转速下的流场流动图像,从中选择图像较清晰且具有代表性的一组.通过电子转速表测得泵轮转速为315 r·min-1,在此转速下采集了液力变矩器的制动工况(i=0)、牵引工况(i=i*)和空载工况(i=1)的径向和轴向的流动图像进行分析[12].
3 测试结果与分析
3.1 制动工况(i=0)
采集到的制动工况下(i=0)径向切面流动状况如图6所示.
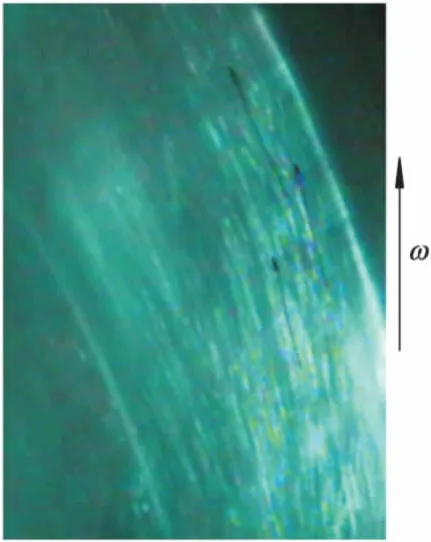
图6 制动工况下(i=0)径向切面
从图6可以明显看到示踪粒子的流动,清晰地看到轨迹分为箭头、箭身、箭尾以及液流的流动方向.由于液流既随着泵轮一起作牵连运动,又沿着流道作相对运动,在图像中也可以看到2个方向的流动趋势.同时在图像中,示踪粒子轨迹在靠近外环处密度较小,粒子轨迹较长,表示液流在外环处液流流速较高,随着液流流过流道的中段,粒子轨迹密度增大,轨迹较短,流速降低.ω为叶轮旋转角速度.
采集到的制动工况下(i=0)泵轮轴向切面流动状况如图7所示,中部比较暗的是泵轮叶片,叶片左右2个流道轴向流动,示踪粒子在泵轮和涡轮的交界面处流动比较复杂,示踪粒子轨迹所表示的运动轨迹出现涡流,这是由于液流一方面随泵轮旋转运动,一方面从泵轮出口流出,冲击涡轮,受到涡轮静止叶片的阻碍,液流回流.
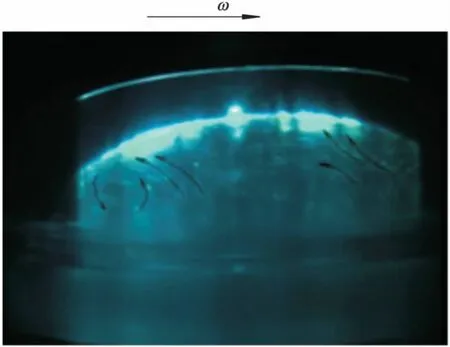
图7 制动工况下(i=0)轴向切面流动状况
3.2 牵引工况(i=i*)
牵引工况下(i=i*)径向切面流动状况如图8所示,与制动工况的流动状况相比较,代表液流流动的粒子轨迹随着泵轮一起作旋转运动更均匀,作牵连运动更为明显,说明牵引工况流量减少,流动相对制动工况稳定,流动速度较均匀.
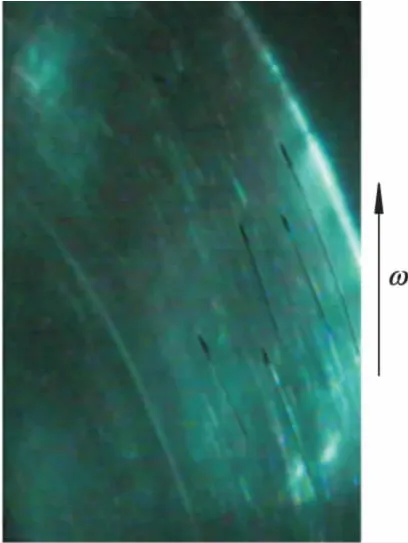
图8 牵引工况下(i=i*)径向切面流动状况
牵引工况下(i=i*)轴向切面流动状况如图9所示,与制动工况相比较,流动状况有明显好转,从示踪粒子流动轨迹来看,液流沿着流道的相对流动也有回流,但与制动工况相比更平稳,说明随着涡轮转速的提高,涡轮与泵轮的转速差减小,涡轮对泵轮的阻碍作用降低,液流的动能得到充分利用.
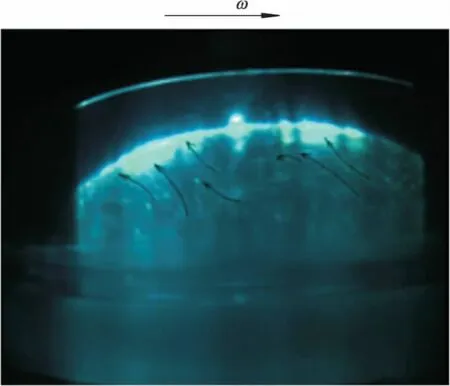
图9 牵引工况下(i=i*)轴向切面流动状况
3.3 空载工况(i=1)
空载工况下(i=1)径向切面流动状况如图10所示,可以明显看到示踪粒子的流动,液流随着泵轮旋转的牵连流动更明显,且示踪粒子轨迹中段长度较均匀,说明泵轮和涡轮的转速差进一步减小,从泵轮流入涡轮的流量减少,效率降低.
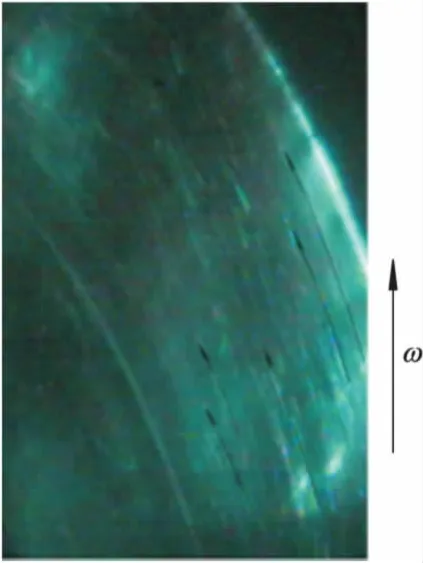
图10 空载工况下(i=1)径向切面流动状况
空载工况下(i=1)轴向切面流动如图11所示.
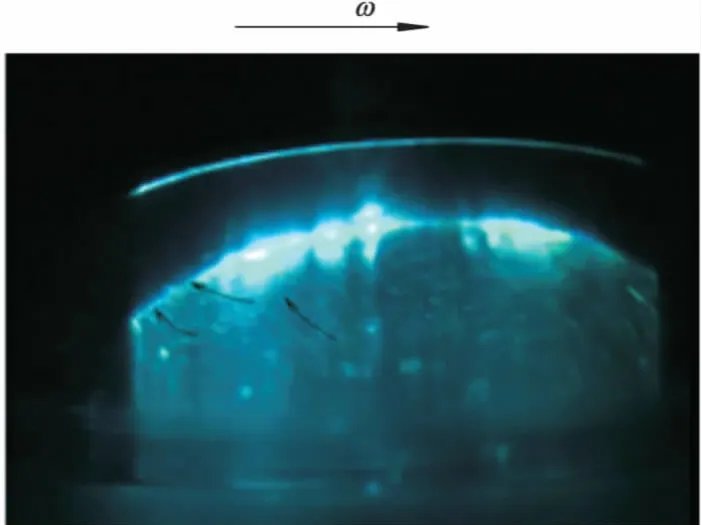
图11 空载工况下(i=1)轴向切面流动状况
从图11可以看出:与牵引工况相比较,流动更平稳.从示踪粒子流动轨迹来看,液流沿着流道的相对流动减弱,在泵轮和涡轮的交界面处涡流强度相对减少,说明随着涡轮转速的提高,涡轮与泵轮的转速差减小,流量减少,效率降低.
4 结论
利用PIV测试技术测量液力变矩器内部流动,通过试验采集泵轮转速为315 r·min-1,且工作在不同工况下泵轮内部流动图像.通过图像可清晰地看到代表液流流动的示踪粒子的速度大小和方向.测试结果验证了利用PIV测试技术测量液力变矩器内部流场是可行的,可为进一步识别内流场提供依据.
References)
[1]郑明辉,江吉彬.装载机液力变矩器性能分析及测试[J].液压气动与密封,2010(12):46-49.Zheng Minghui,Jiang Jibin.Car loader fluid strength bending moment performance analysis and test[J].Hydraulics Pneumatics&Seals,2010(12):46-49.(in Chinese)
[2]胡益飞.液力变矩器性能试验自动测试系统的研究[J].机电工程技术,2010,39(9):95-96.Hu Yifei.Study on hydraulic torque converter performance testing and automatic test system[J].Mechanical&Electrical Engineering Technology,2010,39(9):95-96.(in Chinese)
[3]柴博森,马文星,卢秀泉,等.基于粒子跟踪测速技术的液力偶合器内部流速测定方法[J].农业工程学报,2011,27(7):140-145.Chai Bosen,Ma Wenxing,Lu Xiuquan,et al.Internal flow velocimetry of hydraulic coupling based on particle tracking velocimetry technology[J].Transactions of the CSAE,2011,27(7):140-145.(in Chinese)
[4]Wu Guangqiang,Yan Peng.System for torque converter design and analysis based on CAD/CFD integrated platform[J].Chinese Journal of Mechanical Engineering,2008,21(4):35-39.
[5]Kreizer M,Ratner D,Liberzon A.Real-time image processing for particle tracking velocimetry[J].Experiments in Fluids,2010,48(1):105-110.
[6]Pedersen N,Larsen P S,Jacobsen C B.Flow in a centrifugal pump impeller at design and off-design conditions-part I:particle image velocimetry(PIV)and laser doppler velocimetry(LDV)measurements[J].Journalof Fluids Engineering,2003,125(1):61-72.
[7]Fan Lidan,Ma Wenxing,Lu Xiuquan,et al.PIV measurement of incompletely liquid-filled hydrodynamic coupling[C]∥IEEE International Conference on Information and Automation.Piscataway,USA:IEEE,2010:1448-1451.
[8]Wernet M P.Development of digital particle image velocimetry for use in turbomachinery[J].Experiments in Fluids,2000,28(2):97-115.
[9]Westerweel J,Elsinga G E,Adrian R J.Particle image velocimetry for complex and turbulen flows[J].Fluid Mech,2013,45:409-436.
[10]严 军,何 仁,鲁 明.液力缓速器变叶片数的三维数值模拟[J].江苏大学学报:自然科学版,2009,30(1):27-31.Yan Jun,He Ren,Lu Ming.Numerical simulation of hydraulic retarder with different blade number[J].Journal of Jiangsu University:Natural Science Edition,2009,30(1):27-31.(in Chinese)
[11]许妍霞,唐 波,宋兴福,等.水力旋流器内部流场模拟分析与PIV验证[J].华东理工大学学报:自然科学版,2013,39(1):1-7.Xu Yanxia,Tang Bo,Song Xingfu,et al.Computational study and PIV validation of flow field in a hydrocyclone[J].Journal of East China University of Science and Technology:Natural Science Edition,2013,39(1):1-7.(in Chinese)
[12]李亚林,袁寿其,汤 跃,等.离心泵内流场PIV测试中示踪粒子跟随性的计算[J].排灌机械工程学报,2012,30(1):6-10,14.Li Yalin,Yuan Shouqi,Tang Yue,et al.Analysis on tracing ability of PIV seeding particles in flow fields of centrifugal pumps[J].Journal of Drainage and Irrigation Machinery Engineering,2012,30(1):6-10,14.(in Chinese)
