SL6000施工深度追踪技术探讨
2014-12-23王超
王 超
(中国石化集团胜利油田钻井工程技术公司,山东 东营257064)
1 SL6000地质导向系统简介
SL6000地质导向系统是胜利油田自主研发的随钻测井设备,属于正脉冲地质无线随钻测量系统。该仪器可以提供双向自然伽马、多探测深度的电磁波电阻率参数的随钻测量数据。SL6000可以随钻测取地质参数,并依据要求,绘制出相应类型的测井曲线,提供给地质人员进行地质分析。SL6000进行地质导向,能准确地控制井眼轨迹穿行于储层中有利位置,有效的回避油/气或油/水界面。近几年已在胜利油田内外部市场取得了良好的使用效果。在施工过程中,该仪器的深度追踪关系到地质参数与相应地层对应的准确性,所以准确的深度追踪是成功施工的关键。度相加或相减,从而达到准确追踪钻头深度(钻头深度大于井深就开始追踪井深)的目的。
钩载传感器是和大绳死端的悬重液压腔连通的,由于钻具的重量与悬重液压腔的压力成正比,钩载传感器的输出电压与液压腔的压力也成正比,即钩载传感器的输出电压与钻具的重量成正比。如果知道游车空载时的重量g0(其实只是游车重量)及钩载传感器的输出电压V0、钻具到底后钻具和游车的总重量g1以及此时钩载传感器的输出电压V1,就可建立钩载传感器输出电压和钻具悬重之间的线性关系(见图1)。据此,只要知道上述4个值并输入到软件Calibration-hookload中,软件就能准确追踪钻具的悬重。
2 SL6000系统深度追踪原理
进行SL6000施工,其深度是由钩载传感器(Hookload Sensor)和深度传感器(Depth Wheel)协同作用以实现深度追踪。
2.1 钩载传感器
钩载传感器主要监视钻具的状态。当钻具座于卡瓦(Slip-In)时,钻具不能活动,虽然游车上下活动、深度传感器及SL6000LWD软件记录的脉冲计数有变化,但是软件记录的钻头位置、井深等数据是不变的,变化的只有脉冲计数、游车高度及相关参数。当钻具解开卡瓦(Slip-Out)时,表示钻具已挂在游车上且钻具可以随游车上下运动,软件就会根据深度传感器脉冲方向(正或反)及脉冲数的变化量、脉冲数对应的层位系数计算出钻具上或下运动的距离,并把这一改变量和钻头深
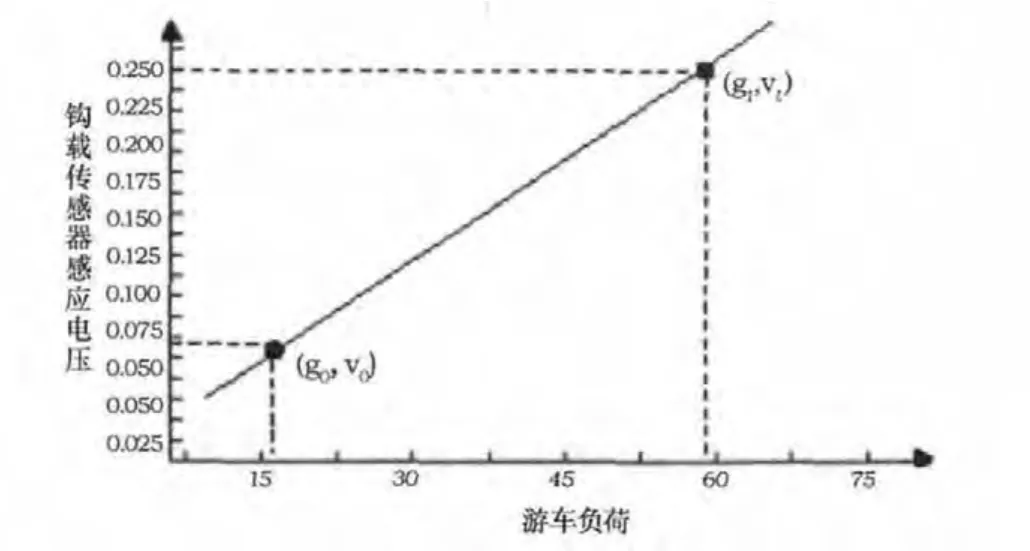
图1 钩载输出电压和钻具悬中之间的关系
2.2 深度传感器
国产深度传感器有磁脉冲传感器(大)和光电脉冲传感器(小),只要连接正确,这两种深度传感器就都有如下共同点:①具有方向性,软件都能识别其转动的方向,这是软件确定深度是应加或减的基础;②每转动一圈,产生的脉冲数是一个常量(记为C,国产的每转一圈产生20〈大〉/12〈小〉,C国产 =20/12,单位:个脉冲);③能准确追踪深度。
深度传感器和滚筒轴连接:滚筒转动一圈,深度传感器产生C个脉冲。该C值除以大绳所在滚筒层位的系数(测量出来的,假设为f,单位为:个脉冲/m),就可得出滚筒转动一圈在大绳对应的层位处钻具的运动距离为:L=C/f。
同理,如果假设滚筒大绳排列层位的深度系数为fi,滚筒在该层位产生的脉冲数为Ci,则钻具运动的长度为:Li=Ci/fi。
如果滚筒大绳从第一层运动到第N层(N小于滚筒可运动最大层数),则钻具运动的距离为:

3 现场施工深度追踪技巧
根据深度传感器原理可知,在SL6000施工中,要想深度追踪准确,关键在于大绳在某一层运动所产生的脉冲必须和该层对应的深度系数对应。如果大绳实际层位和软件采用的深度系数不一致,误差就会产生,而且这种误差越累积越大,最后导致工作量增加。
3.1 传感器深度校正系数的确定
1)吊环上装上吊卡,下放游车使吊卡座于转盘面,游车处于自然的拉紧状态,大绳无松弛。
2)在SL6000LWD MAIN/Acquisition/Depth/Setup Drawworks 窗口下的Counts: (set)(见图2)项设置初始记数1 000,后点击“Set”按钮。该值设置为1 000,是为了防止在工作过程中出现负记数的情况。该值记为A。

图2 深度追踪校正系数的设置
脉冲计数(Counts)记录的是软件启动、深度系统设置完毕后大绳所在的位置,根据该值系统软件准确调用其对应的深度系数以追踪钻具深度的变化。SL6000施工过程中,该数据是确定大绳所在位置的唯一准确参数。一般以吊卡处于转盘面位置为基准,或井口接方钻杆时游车所在位置为基准,通常两者同时采用。
3)在SL6000LWD MAIN/Acquisition/Depth/Setup Drawworks 窗口下的Block Height: (set)项设置初始吊卡高度,该数据的初始计数(游车挂钻具座于转盘面)与脉冲计数(Counts)有对应关系。
Block Height At Zero Cnts:该项指计数器为0时游车的高度。根据上面的建议,该数据建议输为0。
游车高度Block Height是一个参考值,在深度追踪准确的情况下,该值和脉冲数Counts是对应的。但在实际施工过程中,特别是实际层位和实际深度系数不一致的时候,该数据对准确追踪深度没有任何意义。因此建议在施工过程中,不用该值对深度进行调控。但是该值最好能准确反应游车高度以方便施工。
4)点击校正(Calibrate)按钮,显示界面(见图3),对脉冲计数和钻具移动长度进行记录。同时将长度可达30米的卷尺绑在吊卡上,其0读数与吊卡的底部平面对齐。

图3 计算校正系数的界面
5)上提钻具,同时监视滚筒上最底层大绳的位置。当大绳即将进入上一层时,停止上提钻具。
6)将卷尺拉直,在卷尺与钻具平行或与转盘面垂直的情况下,读取卷尺至转盘面处的读数。该值记为B,将该值输入到图3所示的Block Pos(m)窗口的第一个空格内。同时读取计算机上所显示的脉冲读数,该值记为C,点击“〈〈”按钮,该值将自动输入到图2所示的Crossover(cts)窗口的第一个空格内。
7)重复步骤5和6,分别测试出从最底层往上的第二、第三、第四、第五层所对应的大绳变化量、计算机检测到的脉冲记数。当数据测试结束,点击OK,完成操作,层位对应脉冲计数及校正系数自动计入主窗口。
这里需要注意的是,最后一层(5 915以上 )的系数(152)并不一定能完全测量出来,有时出于安全需要只要测量一部分大绳的运动量即可,对于SL 6000施工,一般推荐该值为5 000。
8)输入完毕,深度校正系数设置完毕。上下活动钻具,检查深度传感器对深度的追踪是否正确。如果误差很大,须重新校正。
3.2 深度校正基准点的确定
SL6000施工过程中,在调校深度时,首先要找到一个或两个基准点。一般来说,吊卡座于转盘面是一个最好的基准点,钻具只要处于该位置,在脉冲数Counts项中输入该位置的基准脉冲数(1 000),实际脉冲数和实际深度系数就能统一和一致。其次,把接方钻杆时游车所在位置当作第二个基准点。这样,施工过程中,在接单根时,在脉冲数Counts项中输入该位置的基准脉冲数,实际脉冲数和实际深度系数就能统一和一致。
为了做到这一点,要求在校深度之处,首先找出、记下这两个点的基准脉冲数,实际施工过程中根据施工情况可以立即将实际脉冲数和实际深度系数调到统一和一致的地步。
3.3 钻进过程中对追踪深度的校正
在地面设置的深度追踪校正系数,当钻具到达井底后,由于大绳承受重量的变化等因素,计算机所显示的深度与实际深度可能产生一些偏差。偏差过大是不允许的,这时就要对钻进过程的追踪深度进行校正,使追踪深度和实际深度相吻合。
3.3.1 下钻过程中,监视计算机对深度的追踪情况
下钻到底,和地质结合,计算出钻具放到一定位置时钻头的实际位置。将钻具放到该位置,核对追踪深度和实际钻头位置是否吻合。如果不吻合,应校正追踪深度进行。校正方法如下:
1)在SL6000LWD MAIN/Acquisition/Depth/Depth Control窗口的New Depth项的Bit项输入钻头的实际位置(见图4)。

图4 钻进过程中对传感器追踪深度的校正
2)如果在起、下钻过程中显示的井深和起钻前相比有变化,则在SL6000LWD MAIN/Acquisition/Depth/Depth Control窗口的New Depth项的Hole项输入实际井深。
如果实际井深和测量的井深确实有很大的误差,但上次的井深并没有错误,这时可以采取修改深度追踪系统校正系数的方法,进行校正。具体的方法见下面的“对深度追踪系统误差的校正”。
3)在钻进过程中,要时时监视追踪深度及各传感器工作状态的显示情况。如果传感器状态与实际不符,应查明原因,及时改正。如果追踪深度与实际深度误差很大,再次执行本步骤的1、2,对追踪深度和钻头深度进行校正。
4)每钻进一个单根,应记录计算机显示的钻头位置的追踪深度和实际的钻头位置深度以及二者间的误差。如果钻头位置的追踪深度和实际的钻头位置深度间的误差小于1m,且误差值无大的变化,则不用校正深度。如果误差值变化很大,则说明深度追踪系统存在系统误差,应按下面的方法对系统误差进行校正。
3.3.2 对深度追踪系统误差的校正
深度追踪的系统误差是由于校正系数的不准确而引起的误差,其表现为定量地逐渐偏大或偏小。这时除了上述方法重新确定校正系数外,还可以采取修改系数的方法对系统误差进行修正。实际施工过程中,为了防止测井深度数据的突然变化而导致数据缺失或同一类型的数据重复,一般采用修正校正系数的方法,逐步将追踪深度校正到实际深度。具体的方法如下:
1)每打完一个单根,记录钻头位置的追踪深度(A)、实际钻头位置深度(B)及二者间的误差(记为Δd),Δd=A-B。
2)如果Δd逐渐变化,则说明存在系统误差。
3)在存在系统误差的情况下,首先弄清系统误差主要是由滚筒上的哪一层大绳引起的。找出设置的该层大绳的校正系数,假设为Fx,其中x表示为某一层大绳。
4)计算出深度追踪系统误差修正系数Δf,Δf=A/B。
5)输入新的校正系数。新的校正系数等于 Δf*Fx。
6)将新的校正系数值输入到如图2所示的Factor窗口中的x层位置。
7)按照上面的方法,找出其它层位大绳的相应修正系数,并输入新的校正系数。
8)经过一段时间的施工后(一般为一个单根),检查钻头位置的追踪深度(A)、实际钻头位置深度(B)以及二者间的误差(记为Δd)。
如果Δd等于或接近零,则说明新的校正系数正确。
如果追踪深度与实际深度间的误差越来越大,说明新的校正系数不对,需重新校正。
9)施工过程中,追踪深度与实际深度始终应一直保持一致。在施工完毕,准备起钻时,应将深度监视窗口的“钻具离开井底(off)”的开关锁住,防止起、下钻过程中,井深深度值被改写。
4 结论
1)现场SL6000施工过程中,确保深度系统准确追踪深度的关键就是确保大绳所在滚筒的层位和软件采用的深度系数一致。
2)确保大绳所在滚筒的层位和软件采用的深度系数一致的关键在于在基准点对软件深度追踪系统进行基准校正。
3)修改深度校正系数时,系数变大,测量的深度将偏小。系数变小,测量的深度将变大。
[1]刘西林.地质导向无线随钻测量仪器FEWD现场施工常见问题探讨[J].石油钻探技术,2005,33(04):73-75.
[2]张辛耘,王敬农,郭彦军.随钻测井技术进展和发展趋势[J].测井技术,2006,30(01):101.
