模糊PID控制在船舶电站中的应用
2014-12-23陈瑜
陈 瑜
(上海船舶运输科学研究所,中国 上海 200135)
0 引言
随着技术进步和船舶电气化程度的不断提高,船舶电站容量日益增大,交流电制已在船舶上占有主导地位。现代船舶基本都使用交流电站,交流电站由多台机组并联运行供电。为了能够不间断的供电,需要进行并车、解列的负荷转移和分配的操作。为了保证船舶电力系统电力质量,要提升功率自动分配的响应速度、提高机组间功率分配的精度。
本文采用模糊-PID 复合控制原理,在多机组并车初时采用模糊控制,加快负荷转移速度;当多机组功率分配偏差较小时,采用PID 控制,通过模糊控制器整定PID 参数,提高多机组功率分配精度。
1 传统船舶电站PID 控制器结构与原理
传统PID 控制器具有算法简单、稳定性好、可靠性高的特点,是自动化船舶电力系统中应用最广泛的一类控制器。
传统PID 控制器的输出量为u(t),输入量为e(t),它们之间的关系式为

式中u(t)为控制油门大小的模拟量脉冲信号,e(t)为本机功率与在网机组平均功率的功率差,Kp为比例增益,KI为积分增益,KD为微分增益。
传统PID 控制器通过采集并处理发电机组频率、电压、电流、功率差信号,通过PID 计算后输出合理的脉冲调整信号,以达到各台机组间功率平衡的目的,保证电力质量。
2 模糊-PID 控制器的结构与原理
2.1 模糊控制理论简述
模糊控制是以模糊集合论、模糊语言变量及模糊逻辑推理为基础的一种计算机数字控制。模糊控制是基于丰富操作经验总结出的、用自然语言表述控制策略,或通过大量实际操作数据归纳总结出的控制规则,用计算机予以实现的自动控制。它与传统控制的最大不同,在于不需要知道控制对象的数学模型,而需要积累对设备进行控制的操作经验或数据,它是一种非线性控制,属于智能控制。
2.2 船舶电站模糊-PID 控制器原理
无论经典控制理论还是现代控制理论设计一个控制系统,都需要事先知道被控制对象精确的数学模型,然后根据数学模型以及给定的性能指标,选择适当的控制规律,进行控制系统设计。然而,在许多情况下被控对象的精确数学模型很难建立。船舶电站多机组并车负荷转移时,各类参数多变,要获得满意的控制效果,就需要对PID 的参数不断的进行在线调整。由于电压、电流、频率、功率变化无常,往往没有确定不变的数学模型和规律可循,利用模糊控制器调节成为一个可行的选择。模糊控制器充分利用船舶电力系统操作人员的实践操作经验,充分发挥PID 控制器的优良控制作用,使船舶电力系统达到最佳的功率分配效果。
以船舶电力系统最常见的双机并车,总功率100kW 为例。其单机功率与在网机组平均功率差论域X=[-50,50](kW),功率差变化率论域Y=[-5,5](kW/t)。使用模糊控制器对它进行调节,要求单机功率与在网机组平均功率差为0±50kW。采用7 个等分的三角形模糊子集涵盖功率变化的范围:NB(负大)、NM(负中)、NS(负小)、Z(零)、PS(正小)、PM(正中)、PB(正大);采用5 个等分的三角形模糊子集覆盖功率变化率的范围:NB(负大)、NS(负小)、Z(零)、PS(正小)、PB(正大)。通过模糊论域取值方法可以得出任意时刻的功率差及功率差变化率所对应的模糊论域及模糊子集。
2.3 调节传统PID 控制器三个参数的模糊规则
通过多次操作的经验总结或多次操作的数据处理,结合理论分析可以归纳出功率差e、功率差变化率ec 跟PID 调节器的三个参数KP、KI、KD间的关系
(2)当5%Pe≤≤20%Pe时,应取较小的KP,这样可以使负荷转移响应的超调略小一点;此时可以适当增加KI的取值。
2.4 模糊-PID 控制器结构
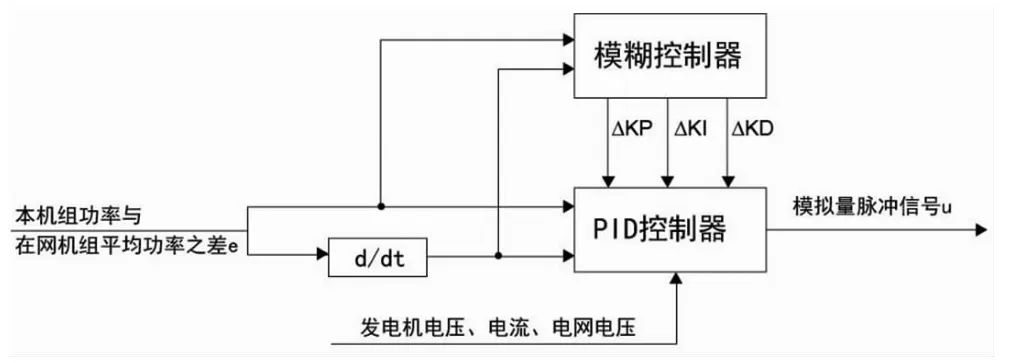
图1 模糊PID 控制器结构图
把输入传统PID 控制器的功率差e 和功率差变化率ec 同时输入模糊控制器。分别对传统PID 控制器三个参数KP、KI、KD进行调节,把得到的修正量ΔKP、ΔKI、ΔKD输入到PID 控制器,对三个参数进行实时在线修正。
3 模糊-PID 控制器在调试生产中的作用
以船舶电力系统最常见的双机并车,总功率100kW 为例。原在网机组功率由100kW 降至50kW,后并入机组功率升至50kW。
使用传统PID 控制器调节负荷转移,如图2。
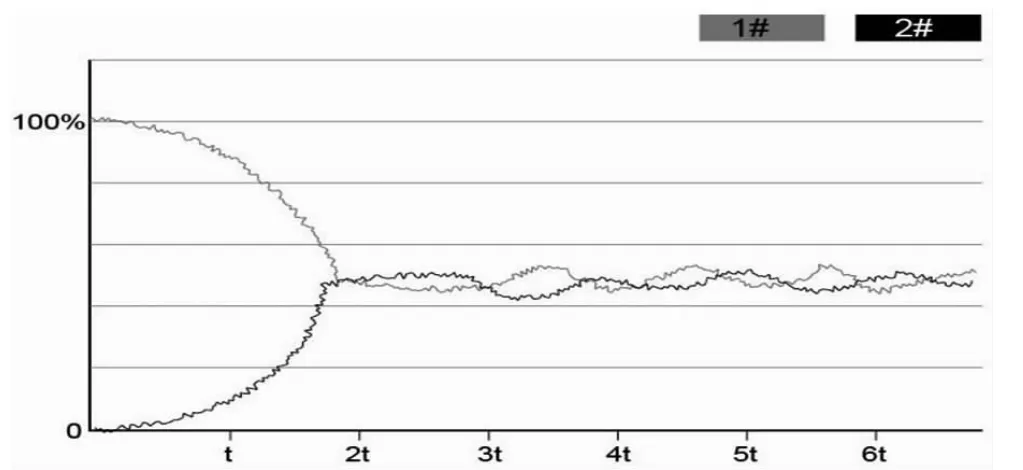
图2 传统PID 控制器负荷转移调整过程
使用模糊-PID控制器调节负荷转移,如图3。
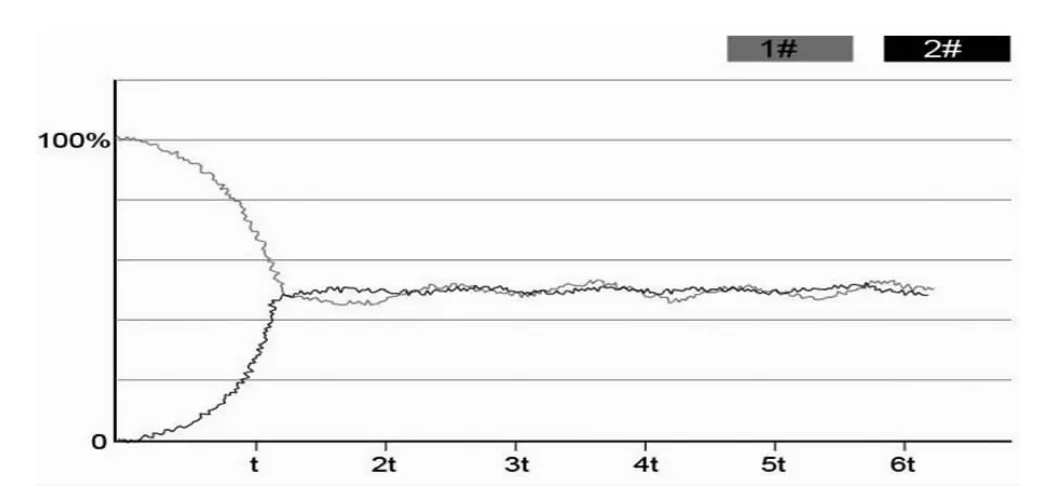
图3 模糊PID 控制器负荷转移调整过程
试验数据表明:利用模糊-PID 控制器控制负荷转移过程,当本机组与在网机组平均功率差较大时,有较快的负荷转移响应速度;当功率差较小时,具有较小的超调量。
4 结论
本文针对船舶电站负荷转移时传统PID 控制器初期响应慢、后期超调量大的不足之处,利用模糊控制修正PID 控制器的三个参数,以得到较好的响应速度及较小的超调量。
[1]石辛民,郝整清.模糊控制及其MATLAB 仿真[M].清华大学出版社,2008.
[2]王文义,茅云生.船舶电站[M].哈尔滨工程大学出版社,2006.
[3]诸静.模糊控制理论与应用[M].机械工业出版社,2006.
[4]林华峰.船舶电站与电力拖动[M].哈尔滨工程大学出版社,2006.
[5]Benjamin C.Kuo,Farid Golnaraghi,Automatic Control Systems[M].John Wiley&Sons,2003.
[6]Timothy J.Ross.Fuzzy Logic and Its Application[M].Beijing Electronic Industry Press,2001.