基于网格密度聚类的雷达信号在线分选算法
2014-12-21董柏娴汤建龙
董柏娴,汤建龙
(西安电子科技大学电子信息攻防对抗与仿真技术教育部重点实验室,陕西 西安710071)
0 引言
雷达信号分选是现代雷达侦察系统中必不可少的部分,它在电子对抗中起着极其重要的作用。随着各种体制的雷达及精确制导武器的大量应用,雷达对抗侦察系统面临的信号环境日趋密集,信号更加复杂多变[1],而且对分选操作的实时性要求也越来越高。雷达信号分选的实时性、准确性和可靠性均面临严峻的挑战。
近年来,聚类思想被越来越多地应用于雷达信号分选中,并且取得了很好的效果。聚类分选的算法主要有基于密度的聚类算法、基于网格的聚类算法、基于划分的聚类算法、基于层次的聚类算法以及基于模型的聚类算法等。例如文献[2]运用网格密度聚类的思想实现了雷达信号分选,但其存在的问题是必须在所有雷达信号均已获得的情况下进行整体聚类,不能满足雷达信号分选中越来越高的实时性要求,不能动态地得到分选结果。为了解决这一问题,本文基于网格密度聚类的思想,采用滑动窗口机制来在线动态地获得雷达脉冲信号的分选结果,并且采用计数型滑动窗口模型保存当前的数据流来有效地节省系统资源。该在线聚类算法的优点是在初始阶段不需要获得全部雷达脉冲信号,计算量小,运算速度快,随着信号脉冲流的推进,不断更新聚类情况,动态地获得分选结果,且其硬件实现简单。另外,通过设计优化的网格合并和更新规则,使算法能够区分数据密集区域和稀疏区域,并较快地找到数据分布中存在的类,提高算法的实时性。
1 原理概述
1.1 雷达脉冲信号数据流
雷达对抗侦察接收机输出到信号处理系统的是密集交叠的脉冲流,每个脉冲以脉冲描述字PDW 来表示其特征参数。PDW 包括脉冲到达时间(TOA)、脉冲到达角(AOA)、载频(RF)、脉宽(PW)、脉冲幅度(PA)以及脉内调制(PM)等特征参数值,聚类分选一般使用其中的AOA、RF 和PW 参数。如果将每个PDW 当成一个空间向量,则PDW 流就构成了一个三维空间[3]。该算法在进行数据流挖掘聚类前,将数据流中的数据按比例缩放到相应的网格单元中来提高数据质量,从而提高聚类的质量。
1.2 网格密度结构
给定d 维空间D 中的一个点,其属性(D1,D2,…,Dd)都是有界的,设第i维的值在区间[li,hi]中,其中i=1,2,…,d,则D=[l1,h1]×[l2,h2]×…×[ld,hd]。将D 的每一维平均分成k个长度相等的区间段,这样将空间D 划分为kd个子空间(即网格单元)[4]。若两个网格单元有相邻的边界或顶点,则这两个网格互称为邻居。落入每个网格单元内的数据点的个数称为网格单元密度。一个网格单元的网格密度大于或等于给定密度阈值Minpts 时,称该单元为高密度网格,否则称为低密度网格。如果一个低密度网格单元的所有邻居都是低密度单元,那么该单元中的点为噪声点。一个聚类是相邻的高密度网格单元的集合。
1.3 滑动窗口模型
本文算法采用计数型滑动窗口模型,如图1所示。设窗口容量为N,随着时间的推移,数据流不断向前移动进入窗口,窗口头部每读入1个新数据,尾部相应地会移出1个旧数据。其中,数据xi(i =1,2,…,N)落入网格单元gi(gi为第i个网格单元,i=1,2,…,kd),且不同的数据可能落入相同的网格单元。

图1 滑动窗口模型
设窗口滑动1次产生的数据元素为尾部移出的旧数据xi-1和头部进入的新数据xi+N-1。滑动窗口内数据进出的机制为:首先移除xi-1,更新网格单元gi-1的密度;然后映射xi+N-1到相应网格单元,并更新gi+N-1网格单元密度。最后判断网格单元密度变化情况,如果网格单元密度gi-1=gi+N-1,即进出元素映射网格相同,或者gi-1、gi+N-1的疏密度均未发生改变,则不作处理;如果gi-1转变为低密度,则删除gi-1,若删除gi-1后引起原有类分裂,则重新生成不同的类;如果gi+N-1转变为高密度网格单元,则将其加入邻居类中,若存在连通的类,则进行合并。
1.4 优化的网格合并规则
将待分选数据规范化后映射到对应的网格单元中,依次扫描每个网格单元,统计落入每个单元格的数据点数,并标记高低密度网格。搜索未分类高密度网格单元的邻居单元,如果邻居单元中存在高密度网格单元,则继续搜索,将搜索到的所有高密度网格单元中的数据点合并为一类。然后类号加1,重复以上步骤,直到所有的高密度网格单元都被遍历。该优化的网格合并规则不需要设置簇中心,通过高密度网格深度搜索、遍历来实现聚类,聚类精度更高。根据文献[5],当进行在线动态聚类时,删除低密度网格单元并不影响聚类质量,因此在该网格合并规则中对于低密度网格单元没有进行处理。
2 在线聚类分选算法
本文算法给出了雷达信号脉冲流在线聚类分选的过程,主要包括聚类初始化和聚类更新两部分[6]。
1)当滑动窗口中的数据达到窗口容量N 时,进行聚类初始化。随着信号脉冲流的推进,算法不断地更新结果,从而实现雷达信号脉冲流的在线分选。在线聚类部分算法流程图如图2(a)所示。
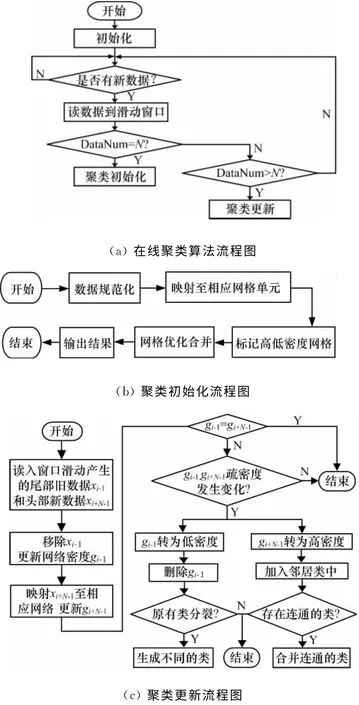
图2 算法流程图
2)聚类初始化过程是当滑动窗口内数据初次装满时进行的聚类。首先,将滑动窗口中规范化后的数据映射到相应的网格结构中,并根据网格密度标记出高低密度网格;然后,对高密度网格单元进行搜索,并对其邻居网格进行合并,直到所有的高密度网格单元都被遍历。其流程图如图2(b)所示。
3)聚类更新过程采用滑动窗口机制和网格存储结构,随着信号脉冲流的到达,将按照滑动窗口数据进出机制产生的新旧数据映射到相应的网格单元中,更新相应的网格单元密度,进而更新聚类结果。其流程图如图2(c)所示。
3 仿真实验分析
为了验证该算法在雷达信号分选方面的可行性、有效性及对噪声脉冲的识别能力,在雷达脉冲数据流中加入了15%的噪声。滑动窗口容量N 设置为250。实验仿真选用的辐射源类型、数目,以及特征参数信息如表1所示。为了更直观地观察分选结果,在实验的信号脉冲流中,4部雷达信号按辐射源类型标号顺序依次出现,各仿真了250个数据。另外,考虑到误差问题,在模拟雷达脉冲信号时,给每个参数都加了随机抖动。

表1 雷达参数设置表
原始雷达信号参数分布如图3(a)所示,聚类初始化结果如图3(b)所示。在三个不同时刻获得的在线聚类分选结果如图3(c)~(e)所示,分别按时间顺序描述了雷达信号脉冲流的进化过程。其中,图3(c)是窗口滑动190次时的结果,此时窗口中第1类雷达信号数据逐渐减少,第2类逐渐增多,数据聚为两类:类1和类2;图3(d)是窗口滑动420次时的结果,此时窗口中第1类雷达信号已经全部出去,第2类逐渐减少,第3类逐渐增多,窗口中数据聚为两类:类2和类3;图3(e)为窗口滑动663次时的结果,同理,此时窗口中数据聚为两类:类3和类4。由图可以看出,噪声点几乎被完全移除。

图3 在线聚类分选结果
由实验结果可知,本算法在不事先提供雷达辐射源个数的情况下,针对频率捷变、重频参差、脉宽参差等复杂的雷达信号,能自动发现聚类,实时捕捉其动态变化并且排除异常点的干扰,获得了较好的分选结果。
4 结束语
本文算法不需要提前给定雷达辐射源的数目,基于网格密度聚类的思想,采用滑动窗口机制、网格密度存储结构和优化的网格合并规则,能在线动态地分选出密集交叠的雷达脉冲信号,且分选效率高。实验结果证明,该算法能够成功地应用到未知雷达辐射源信号的有效分选中。■
[1]国强.雷达信号分选理论研究[M].北京:科学出版社,2010.
[2]向娴.一种基于网格密度聚类的雷达信号分选[J].火控雷达技术,2010,39(4):67-72.
[3]赵国庆.雷达对抗原理[M].西安:西安电子科技大学出版社,1999.
[4]邱磊,杨承志,何佃伟.一种新的基于网格聚类的雷达信号预 分 选 算 法[J].现 代 防 御 技 术,2013,41(2):167-172.
[5]Chen Y,Tu L.Density-based clustering for real-time stream data[R].San Jose,California,USA:ACMKDD’07,2007:133-142.
[6]毛国君,王欣,竹翠.基于网格结构的数据流在线快速聚类算法[J].北京工业大学学报,2011(10):1575-1579.