双机械臂反对称结构线路巡检机器人设计研究
2014-12-19郑忠才姜振廷肖海勇
董 旭,郑忠才,高 岩,姜振廷,肖海勇
DONG Xu1,ZHENG Zhong-cai1,GAO Yan2, JIANG Zhen-ting1, XIAO Hai-yong1
(1.山东建筑大学,济南 250101;2.山东电子职业技术学院,济南 250014)
0 引言
输电线路长期暴露在外部环境中会导致线路老化等缺陷,存在安全隐患,电力公司需定期对输电线路进行检查[1]。目前对电线路的检查主要有地面目测法与直升飞机巡航法,前者劳动强度大,可靠性差,精度低,后者费用高,技术难度大[2]。线路巡检机器人在输电线路上行走时可以近距离检测线路情况,可靠性好,实用方便。国外线路巡检机器人的研究开展较早,并取得了一系列的成果,如日本东京电力公司的光纤复合架空地线巡检机器人,加拿大魁北克水电研究所的LineScout移动机器人等;近年来国内在线路巡检方面研究方面也有突破性的进展,如武汉大学研制的沿架空地线自主巡线机器人能够自主的跨越杆塔,中科院沈阳自动化研究所研发的轮臂复合机构机器人已进入推广阶段[3]。本文所述线路巡检机器人采用双机械臂反对称结构,对机器人的机械本体进行设计,针对高压线路的导线特点,设计出适用于高压线路的可翻转行走及越障机构,提高机器人在线路行走时的稳定性,简化夹持机构,减轻机器人本体的重量。
1 机器人本体结构建模
1.1 机械总体设计
双机械臂反对称结构线路巡检机器人由机械本体,可伸缩机械臂,夹持行走机构,配重控制箱组成,如图1所示。共有10个自由度,包括2个行走转动关节,2个滚轮翻转关节,2个手臂伸缩关节,2个手臂(箱体)移动关节,2个配重移动关节。机器人在线路上行走时要保证稳定性,双机械臂反对称结构可以限制滚轮在输电线路的单方向的摇摆,增加了机器人本体的稳定性;在翻越障碍物时,需双臂及配重相互协调,滚轮的位置固定及夹持可通过滚轮翻转关节实现,机械臂移动越过障碍物,双臂轮流跨越达到越障的要求。机器人的夹持及行走都是由滚轮翻转关节及行走机构完成,在结构设计上简化的机构,实现了机器人结构的轻量化。
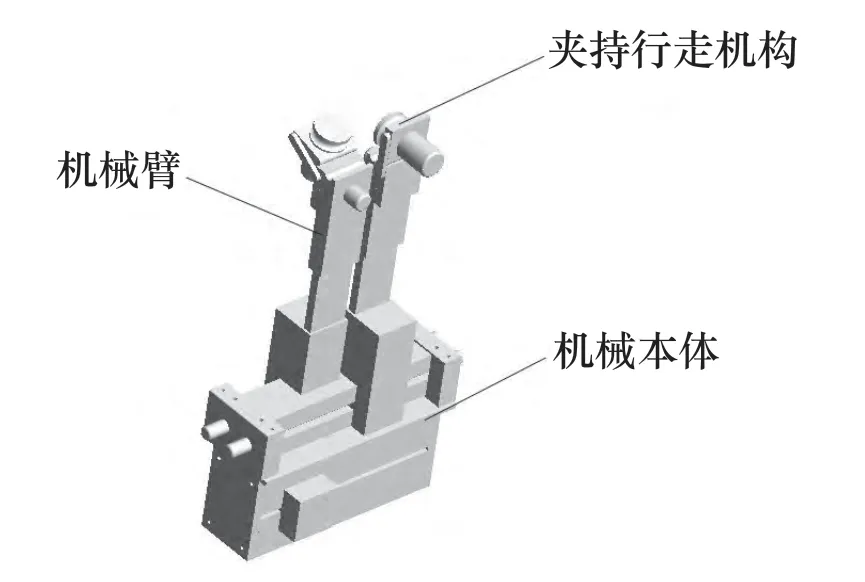
图1 双机械臂反对称结构线路巡检机器人机械总体设计
1.2 机械本体及配重设计
机械本体为机械臂及控制箱体提供安装位置,包括机械臂的移动关节,由直线导轨,限位端盖,丝杠组成,机械本体结构如图2所示。两条直线导轨对称分布,通过限位端盖固定,丝杠在导向槽内,丝杆驱动电机安装在限位端盖上,通过齿轮减速输出带动丝杠旋转,从而实现机械臂的移动。配重控制箱安装在机械本体的下端,控制箱内部装有控制模块,电源模块及其他检测设备,控制箱的两侧开有导向槽,配重块在槽内移动从而实现在越障过程中质心的调节。
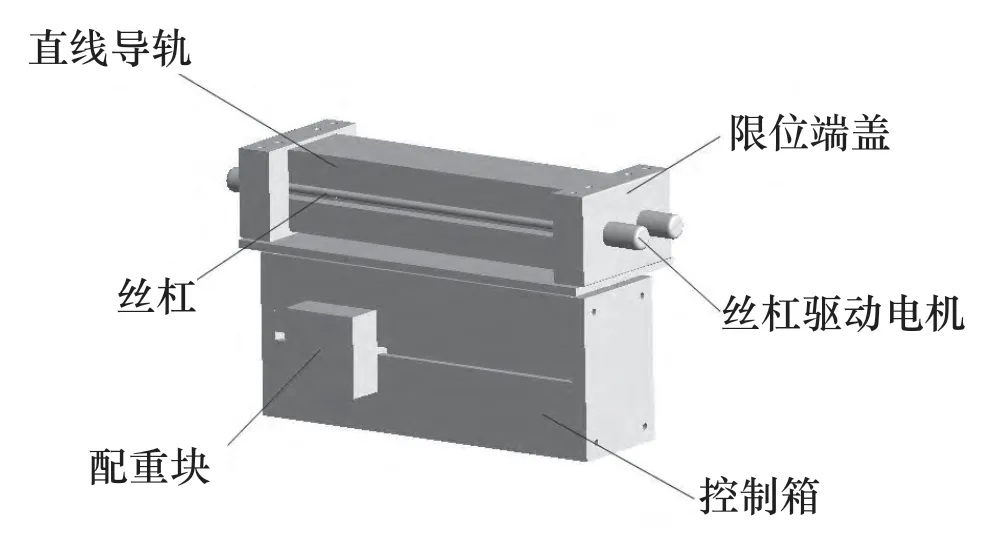
图2 机械本体设计
1.3 机械臂结构设计
可伸缩机械臂为机器人运动的连接件,连接行走滚轮与机械本体,同时调节滚轮的位置,使滚轮与线路接触,机械臂结构如图3所示。机械臂的伸缩动作靠位于上下臂内的丝杠与螺母的螺旋运动实现,在行走时,上下臂之间留有一定活动量,便于在越障时进行调节。机械臂的底部与机械本体的丝杠配合实现移动,顶部设计成凹面,便于架空线的放置,在凹面处表面镀有耐磨材料,目的是增加耐磨度以及凹槽与架空线的摩擦系数,与滚轮相配合实现机器人的夹持、固定与行走;在机械臂的顶端安装驱动电机以实现滚轮的夹持与翻转。

图3 机械臂设计
1.4 夹持行走机构设计
翻转式夹持行走机构有行走滚轮、驱动电机、连接杆组成,结构如图4所示。滚轮的凹槽面与机械臂顶端的凹槽面结构相同,镀有耐磨材料,当槽面闭合时,滚轮与机械臂顶端完成夹持动作,滚轮驱动电机驱动滚轮转动实现机器人在线路上行走,实现行走的要求。在行走时,为防止机器人脱线,使安装于机械臂顶端的翻转驱动电机停止转动锁定,两臂滚轮分别配有驱动电机,在行走时,一端为主动驱动,另一端仅为从动滚轮,不产生驱动效果;在越障时,滚轮驱动电机停止并锁定,翻转驱动电机通过连接杆带动滚轮的翻转,跨越障碍物。
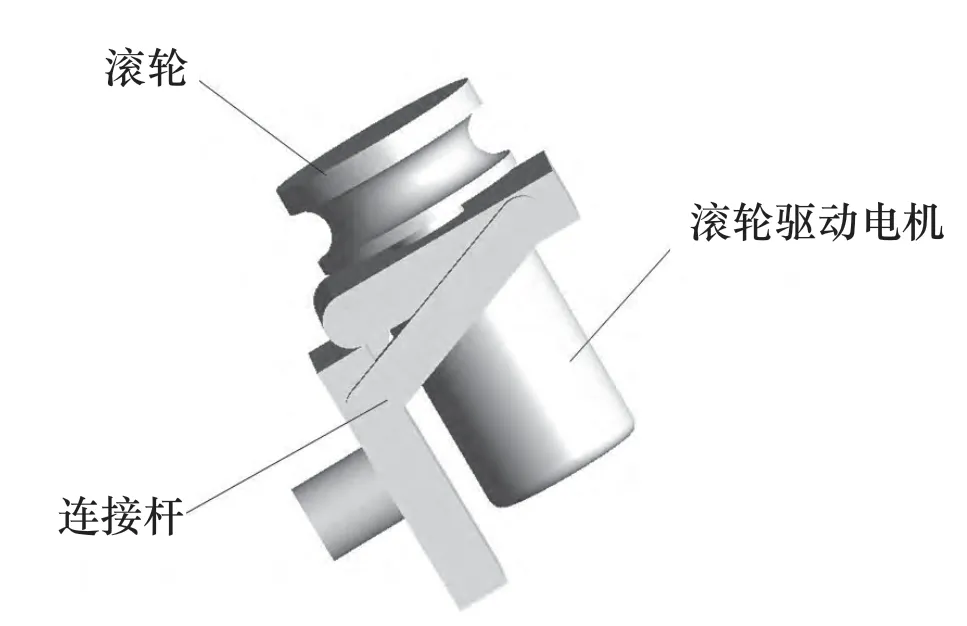
图4 夹持行走机构
2 越障原理
机器人在巡检过程中,遇到障碍物要自主进行躲避,双臂通过协调,一只手臂固定于线上,另一只手臂完成脱线越障上线的动作,悬挂在架空线上的机器人由于受到风力与自身位姿的作用会产生重心的偏移,从而影响机器人的稳定性。机器人在越障的过程中对稳定性要求很高,因此,通过对夹持行走机构及配重机构设计,提高整体的稳定性,实现简单,可靠的越障方式。
越障的过程如图5所示,当机器人检测到间隔棒时,手臂B关联的驱动电机停止驱动,锁定位置,手臂A的滚轮驱动电机停止锁定,翻转驱动电机通过连接杆带动滚轮的翻转,完成脱线动作,同时上下臂收缩,机械本体的丝杠转动使手臂A向前移动,跨越间隔棒,丝杠驱动电机停止驱动,上下臂拉伸,当手臂A检测到导线时,锁定位置,翻转驱动电机驱动连接杆实现滚轮的夹持,当手臂A的越障动作完成后,通过机械本体的丝杠驱动电机转动调整机器人在输电线上位置,手臂A关联的驱动电机停止转动,锁定位置;手臂B按照相同的越障原理进行跨越间隔棒,完成跨越后,机械本体的丝杠驱动电机再次转动,调整机器人在输电线上位置,使其达到稳定状态,此时,越障过程完毕,手臂B滚轮驱动电机驱动行走,手臂A的滚轮从动前进,丝杠驱动电机与翻转驱动电机锁定,机器人开始在线路上行走。
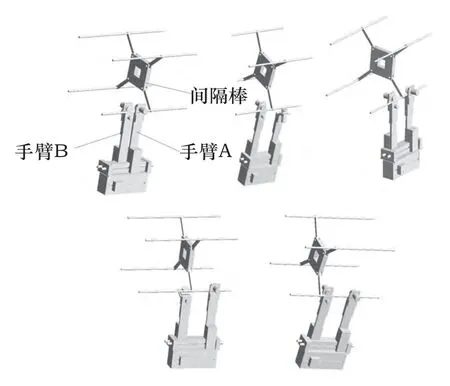
图5 越障过程
3 控制系统
机器人的控制系统采用模块化设计,包括信息采集模块,控制模块,无线通讯模块,驱动模块,如图6所示。信息采集模块由超声波传感器和微型摄像头模块组成,超声波传感器用于行走时检测障碍物以及在越障时检测输电线的位置,通过微型摄像机反馈线路情况,控制模块采用TMS320F2812数字讯号处理器进行信号的处理,由驱动模块执行末端电机驱动;地面控制主机用于技术人员在地面对机器人发送指令,接收反馈图像信号,与机器人的控制模块通过无线通讯模块ZigBee设备进行数据传输。
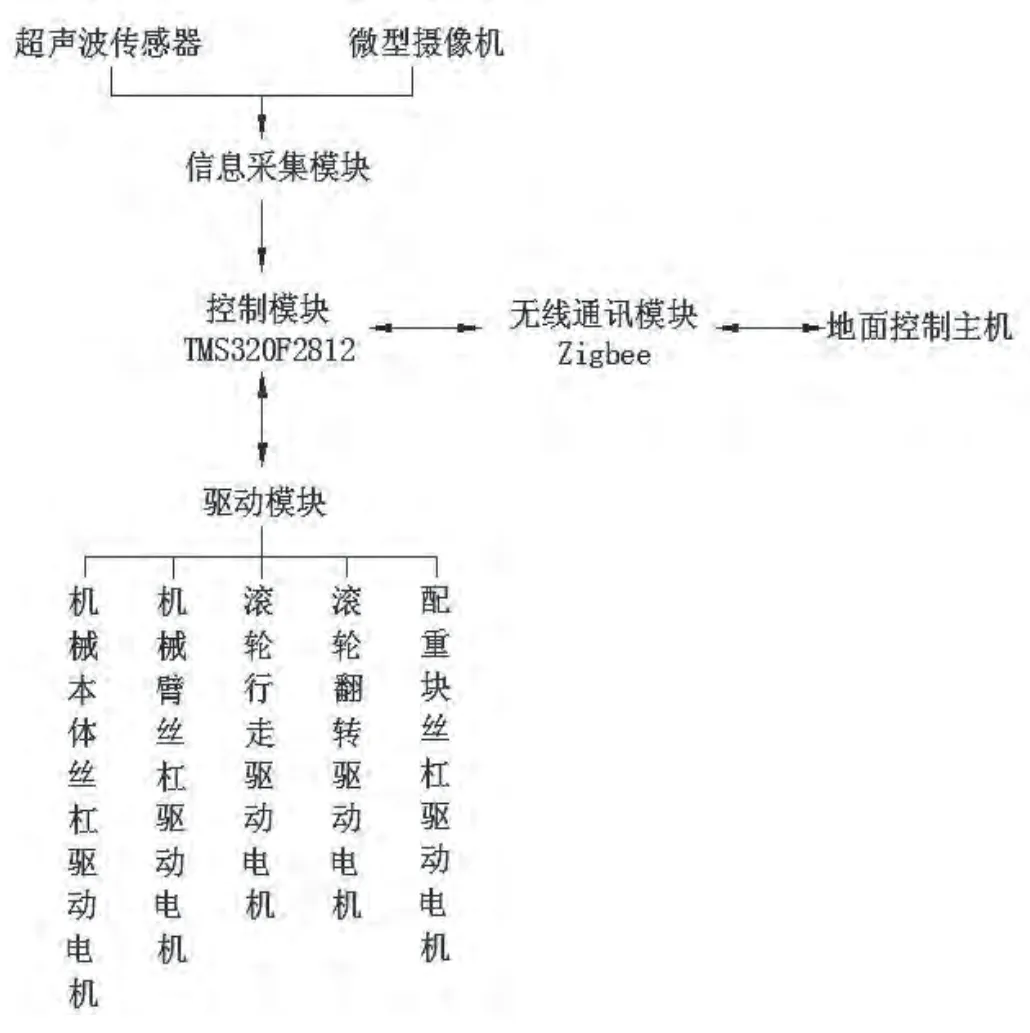
图6 控制系统设计
4 结论
本文通过对双机械臂反对称结构线路巡检机器人各部分进行结构设计,提出一种新型的夹持行走机构的线路巡检机器人,并对越障过程进行论述,对控制系统进行模块化设计,实现了机器人在线路上的行走及越障的功能,简化机械结构,达到轻量化的目的,对未来线路巡检机器人的发展提供可选方案。
[1]王吉岱,谢永,王凤芹.高压输电线路巡检机器人机械本体设计[J].机械设计与制造,2007,17(8):124-126.
[2]孙崔莲,王洪光,赵明扬,等.超高压线巡检机器人移动越障机构综述[J],机械设计与制造,2006,(10):161-163.
[3]吴功平,李诚,马玉林,等.高压电网巡检机器人研究及应用综述[A].2009年全国输变电设备状态检修技术交流研讨会论文集[C].2011.
[4]张运楚,梁自译,谭民.架空电力线路巡线机器人的研究综述[J].机器人.2004,26(5):467-473.
[5]王鲁单,王洪光,房立金,等.输电线路巡检机器人越障控制研究[J].中国机械工程.2007,18(22).
[6]李向东,鲁守银,王宏,等.一种智能巡检机器人的体系结构分析与设计[J].机器人.2005(06).
[7]吴功平,肖晓辉,郭应龙,等.架空高压输电线自动爬行机器人的研制[J].中国机械工程.2006,17(3).
[8]付双飞,王洪光,房立金,等.超高压输电线路巡检机器人越障控制问题的研究[J].机器人.2005(7):341-345.
[9]Wu Gongping,ZHENG Tao,XIAO Hua,et al.Navigation,location and non-collision obstacles overcoming for high-voltage power transmission-line inspection robot[C]// Mechatronics and Automation,2009.ICMA 2009.International Conference,2009,5(19-23):2014-2020.
