修船码头移泊调度系统研究
2014-12-18杨坤荣唐伟炜张翠翠
杨坤荣,唐伟炜,张翠翠
(1.中船澄西远航船舶 (广州)有限公司,广东广州 511462;2.华南理工大学,广东广州 510641;3.广东中远船务工程有限公司,广东广州 523146)
随着经济全球化海洋运输业也随之蓬勃发展,同时也带来船舶修造业的发展。近年来,中国造修船业在全球市场上所占的比重正在明显上升,中国已经成为全球重要的造修船中心之一。
随着船舶修造业的发展,各船厂码头停靠船舶数量以及多样性不断增加,人员工作量日益增大。船舶调度是修船厂作业的重要组成部分,船舶调度优化问题直接影响工作效率、质量和成本,从而影响到船舶企业的盈利能力,因此需要优化船舶调度。虽然目前智能调度系统已经广泛应用于各个行业,港口的智能调度系统也被广泛提及,但是针对船厂的“船舶移泊智能调度系统”尚未有明确的定义。该问题涉及到多种约束条件,包括码头泊位的约束 (泊位的长度、水深、装卸能力)。目前,国内绝大多数船厂的移泊作业还是依靠调度人员的经验来管理,以致于企业资源无法充分利用,运行成本过高。因此在实际工作中对船舶调度优化问题进行研究,建立能够解决船舶调度的系统,以提高工作质量和资源利用率是很有必要的。
计算机在船舶工业中运用已十分普遍,相应的管理系统也趋于成熟,但并不像其他行业的管理信息系统那样稳定、规范、为大众所知晓,这在很大程度上是由于使用主体独特的经营方式和个性的运行模式所造成。各企业要么照搬国外大型软件,要么临时拼凑一些软件模块勉强使用,不足之处用手工作业来弥补,不能充分发挥出高新技术在节约成本,提高生产效率和经济效益中的积极作用。实际上,该行业在适应不断变化的市场形势中,经过长期调查和分析、总结规律,制定出一套适合自己的管理信息系统是至关重要的。
2005年,刘文等人针对某港务企业船舶调度管理进行了分析,结合该企业信息系统的开发,实现了人工与智能调度的结合,为该企业船舶调度管理提供了计算机辅助决策功能[1];2009年李军等人引入WEBGIS技术,构建了一个WEBGIS基础平台,并依此建立了一个高度信息化、智能化和网络化的港口船舶协同调度系统[2]。
国外对泊位分配问题的研究相对国内来说比较多,日本的Akio Imai采用拉格朗日松弛算法求解了最小化船舶等待时间和作业时间的优化问题[3];Brown等[4]以最小化船舶靠泊时间为优化目标,给出了相应的泊位调度优化模型及求解方法。
从文献上来看,由于近几年世界航运业的发展,国内外学者的主要精力在研究航运业和港口的船舶货物 (尤其是集装箱)的调运安排上,关于修船厂码头船舶移泊作业问题还很少有学者涉足这个领域。
1 系统概述
船舶智能调度系统是辅助调度人员作出决策,为进厂的船舶指定适当的位置,并设计合理的移泊方案,更直观、有效地进行船舶靠泊,实现人工调度与智能调度的结合,为船舶调度管理提供计算机辅助决策功能。
由于船厂的泊位数量有限,每个泊位同时停泊数艘船时,靠近码头的起重作业范围最佳,为了使各船能用到最有效的起重设备等资源,满足实际生产要求,需要根据实际情况调整移泊位。调研中船澄西远航船舶 (广州)有限公司现行机制,综合因素较多:工程量难易,设备、场地、人员、实行计划等受不确定因素影响,根据经验判断安排调整泊位,未能有数据直观地分析出各泊位作业周期及产生成本。针对这一特征,在公司现有基础模型上,从时间和空间的角度出发,开发一套泊位调度优化系统,提供各泊位时间、成本的数据,优化泊位选择,从而提高生产效率。生产部调度室有一批经验丰富,熟悉移泊流程的工作人员,如何将他们的经验用计算机表达出来,通过实现事先模拟使工作更直观,从而减轻他们的工作负担,提高生产效率是这套系统开发的主要原因。
系统在时间上以工程周期为准则,按照周期长短安排泊位,周期短、工程紧急的船舶优先安排在靠近码头的泊位,并留有余地给临时加急船舶,合理安排码头空间。
智能化船舶调度系统须拥有以下功能。
1)协助管理船舶的进、出厂,以及码头停靠的工作。
2)基于自动调度功能,帮助用户快速、方便、精确地完成船舶调度工作。
3)支持手动调度功能,使用户方便、快捷地完成更加精确、细致的船舶调度工作。
4)船舶工作周期的提示功能,自动跟踪船舶信息及信息的变化。
5)对码头停靠船舶自动优化,因工作周期的变化进行调整。
6)船舶查询功能能查到具体日期、具体船舶泊位信息,并做报表统计。
7)详细的历史停泊视图和预测将来停泊视图,为用户提供更有价值的船舶信息。
8)起重机的自动调度功能,方便为用户提供精确的起重机调度方案。
9)起重机手动调度功能,使用户方便、快捷地完成更加精确、细致的起重机调度工作。
10)支持直接在界面上拖拽船舶功能,使其调度到合适的位置。为用户提供更加灵活、有效的调度操作。
11)直观的界面,使用户对每天船舶调度情况一目了然。
12)多级权限控制。
13)其他为了提高工作效率所必需的功能。
2 系统处理流程
系统程序处理流程如图1所示。
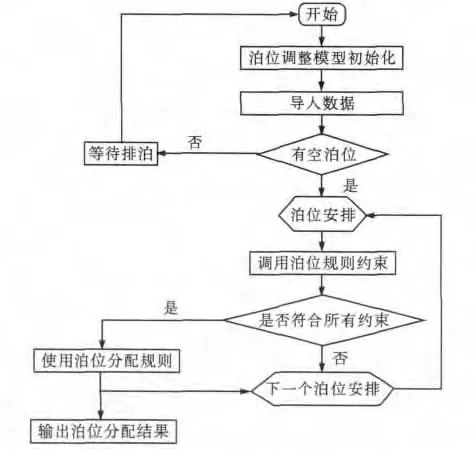
图1 系统程序处理流程图
码头泊位调度问题解决方案的关键因素有以下几点[5]。
1)调度目标数学模型。在泊位的调度问题中,调度的目标很多,如“最短泊位修理期”、“最短移泊距离”等。这些目标之间往往有交叉,使各个目标都最优是不可能的。目前的优化目标常常是多目标的综合考虑,调度目标数学模型的建立是解决调度问题的首要环节。不同的泊位,在不同的时期,不同的外界条件下各目标之间的优先级可能会有所不同,那么调度目标数学模型的建立就不能是固定不变的,应该可以灵活更改实现目标的优先级关系。
2)调度规则约束条件。在泊位的调度中,同时存在着各种约束,如静态约束、动态约束以及临时约束。其中静态约束包括码头泊位的约束;动态约束包括船舶基本情况的约束 (船舶的长度、宽度、吃水、水深等)、设备、工人的约束;临时约束包括自然因素如天气情况和潮汐的约束、其它因素的约束等。这些因素对码头作业效率都存在着复杂的影响。
3)算法的选用。计算方法的选用是系统研究的重点之一,也是本文所设计方案的重要组成部分。国内外学者在码头调度方面多用启发式算法,如遗传算法、蚁群算法、粒子群算法、模拟退火算法等。这些算法各有其的优缺点,选择合适的算法,使调度问题的求解更为灵活、实用极为重要。
在上文所设计的调度问题解决方案的基础上,对求解过程提出一个较为简单的流程,它只作为说明求解的一个基本思路,并未涵盖所有的求解过程。流程设计的主导思想是:按照各规则的优先级分步来搜索合适的任务;根据已分配的任务完成时刻的先后顺序自动将时间向后推移,并将完成任务的再次释放以便执行其余任务;自动调整模型中的状态参数以及块结构,以便继续求解。
3 结束语
本研究来源于中船澄西远航船舶 (广州)有限公司的船舶调度实际问题,旨在探索船舶调度优化问题的思路和途径。船舶移泊调度优化系统实际上是针对船舶的停靠、移泊、设备调度等工作的管理信息系统,目的是将工人从繁琐的手工作业中解脱出来,减小过程成本、提高生产效率、降低生产成本,从而提高企业的经济效益。
[1]刘文,周俊.港务企业船舶的智能调度 [J].计算机工程,2005(6):205-207.
[2]李军,李源惠,吴训坤,等.港口船舶协同调度系统设计与实现[J].船海工程,2009,38(1):13-17.
[3]ImaiA,NishimuraE,PadimitriouS.The dynamite berth allocation problem for a container port[J].Trans portation research partB,2001,35(4):401-417.
[4] BrownGG,CormieanKJ,LawPhongpaniehS,etal.Optimizing submarine berthing with a persistence incentive[J].Research Logisties,1997,44(4):301-318.
[5]王璇,刘世峰,刘达.基于“实时智能”方法的港口物流调度问题研究 [J].物流技术.2009,28(12):10-12.
