汽车ACC系统纵向控制六模式切换策略仿真研究*
2014-12-14刘卫国张君媛童宝锋
王 楠 刘卫国 张君媛 童宝锋
(1.吉林大学汽车仿真与控制国家重点实验室 长春 130022;2.浙江省汽车安全技术研究重点实验室 杭州 310000)
0 引言
汽车自适应巡航(ACC)系统具有定速巡航、跟随前车、紧急制动等功能,在应用时要根据不同的行驶工况对车辆进行不同的控制,而模式划分是实现不同控制的1种方法。合理的控制模式划分方法与切换策略对ACC 系统功能的实现具有重要作用。
目前国内、外大多数ACC 系统根据行驶工况将系统划分成3~4个工作模式,再针对每个模式设计相应的ACC算法[1-5]。意大利都灵大学的Canale等[6]将自动跟车过程分为启步、巡航、跟随和停车4个阶段,对驾驶员每个阶段特性进行分析,并设计了相应的ACC 算法。随着汽车主动安全和驾乘舒适要求的提高,同时考虑到四模式的ACC系统模式之间过渡不平顺,影响乘员舒适性,并且复杂工况下四模式ACC 系统适应性下降问题,北京理工大学的裴晓飞等[7]提出了1种多模式ACC 系统,将ACC 控制模式分为定速巡航、稳态跟随、接近前车、强加速、强减速和避撞等6种模式,并对六模式ACC系统进行实车试验,验证结果表明,其模式之间过渡的平顺性、车辆的动态跟踪特性以及系统的适应性较四模式ACC系统均有了较大的提高。
但是,现有的六模式ACC 系统仍然无法在前车切入等复杂工况下进行合理的模式切换。为了增强六模式ACC 系统在复杂工况下的适应性,笔者通过理论分析和仿真实验,对汽车纵向安全控制系统进行了研究,选取两车相对速度、相对距离和本车速度作为模式划分的基本参数,提出了1种新的六模式ACC系统的模式划分方法,并对各个模式的加速度算法进行研究,制定各个模式的控制策略。最后通过仿真试验对所设计的六模式ACC系统的划分方法及控制算法的合理性进行验证。
1 六模式ACC系统划分方法研究
1.1 模式划分方法
参照文献[7],笔者也将车辆纵向行驶工况定性地划分成6类。为实现各工况的合理控制,需对每1种工况设计相应的ACC 控制模式。模式划分参数的选用对模式划分方法的合理性具有重要的影响。目前普遍采用的用来表征车间运动状态的参数包括:本车速度、前车速度、2 车相对速度、2车相对距离、跟车时距和避撞时间。一般来说,选用的参数太少不足以表示2车运动状态,选用的参数过多或算法较复杂均会导致执行时间过长。因此,笔者选取本车速度、2车相对速度和2车相对距离等3个参数作为基本参数,提出了如图1所示的模式划分方法。
图1中,Vh为本车速度;Vr为相对速度(前车速度减去本车速度);R为2车相对距离;Rw1,Rw2分别为Vr>0 和Vr<0 时的减速安全距离;Rb1、Rb2分别为Vr>0和Vr<0时的避撞安全距离;Rj为加速安全距离。这里,Rw1,Rw2,Rj,Rb1,Rb2均为本车速度Vh与2车相对速度Vr的函数,将其统称为模式划分的边界条件。

图1 模式划分示意图Fig.1 Mode dividing
在笔者的模式划分方法中,当前车超出传感器有效探测距离时本车启用定速巡航模式;当前车进入传感器测试范围时,根据2车相对速度的关系将行驶工况大致分为2部分:
一部分为Vr<0(图1 的左半部分)时的情况。此时,若R≥Rw1,且|Vr|≥k,则ACC系统切换至接近前车模式,本车进行适当制动以向稳态模式1过渡;若R≥Rw1,且|Vr|<k,则ACC系统切换至稳态跟随模式(1),本车进行油门/制动的微调以稳态跟随前车;若Rb1<R<Rw1,则ACC系统切换至减速模式1,本车进行适当制动;若R≤Rb1,则ACC系统切换至避撞模式1,本车进行强制动。
另一部分为Vr>0(图1的右半部分)时的情况。此时,若R≥Rj,则ACC 系统切换至加速模式,本车进行适当加速;若Rw2≤R<Rj,则ACC系统切换至稳态跟随模式2,本车进行油门/制动的微调以稳态跟随前车;若Rb2<R<Rw2,则ACC 系统切换至减速模式2,本车进行适当制动;若R≤Rb2,则ACC 系统切换至避撞模式(2),本车进行强制动。
1.2 模式划分的边界条件
ACC系统随着汽车行驶工况的变化在不同控制模式间进行切换[6-7]。本文ACC系统在本车速度与前车速度的大小关系确定的情况下,模式切换的时机取决于1.1 定义的模式划分边界条件,各边界条件(Rw1,Rw2,Rj,Rb1,Rb2)定义如下。
根据图1所示的模式划分方法,当2车相对距离刚好等于减速安全距离Rw1时,本车处于临界工况,要保证本车经过反应时间t1后以a的减速度制动到与前车速度相等后2车相对距离能够恰好达到安全车距Rx。因此,Rw1的定义式为

式中:驾驶员反应时间t1根据文献[8]的统计研究取为1.1s。减速度a根据汽车行驶工况的统计结果[9]取为1m/s2;Rx为高速公路安全距离标准[10]规定的2车速度相同时应该保持的安全车距,见表1。

表1 高速公路安全距离标准Tab.1 Highway safety standards
将表1中数据进行拟合,得到图2所示的车速-距离分段关系曲线,由此得到任意车速下Rx的计算式:当Vh<80km/h,Rx=1.25Vh;当Vh>80km/h,Rx=2.5Vh-100。
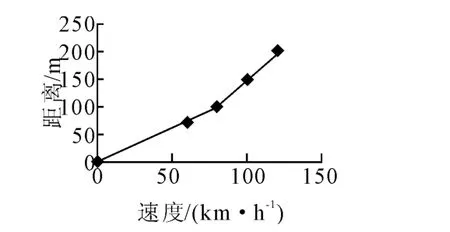
图2 高速公路安全距离标准拟合曲线Fig.2 Fitting curve of highway safety standards
由图1可知,当2车相对距离刚好等于减速安全距离Rb1时,本车处于避撞模式临界工况,必须保证,若前车以最大制动减速度ap制动,本车经过反应时间t1后,以最大制动减速度ah进行制动,2车均完全停止后能够相距R0。因此,Rb1的定义式为

这里,考虑到避撞模式下前车制动减速度大于本车制动减速度时所需的制动安全距离更大,因此保守起见,取ap>ah,使得避撞安全距离算法更加安全。文中根据标准ISO 15622:2002,取2车静止时保持的最小距离R0为4m。
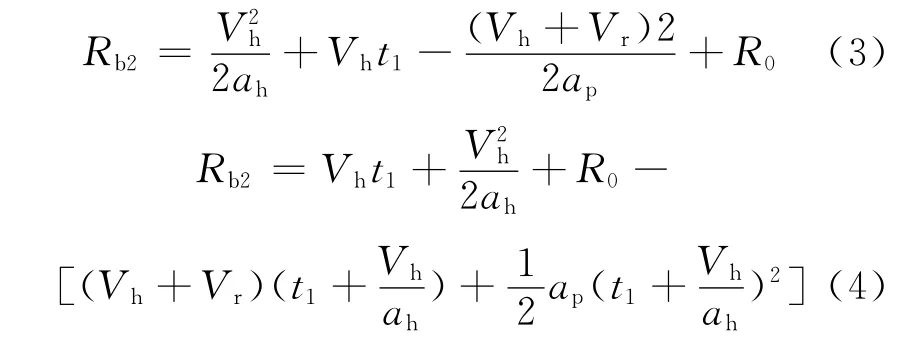
在避撞模式(1)下,Vr<0,且本车制动减速度小于前车制动减速度,并且本车还有制动滞后,所以可以确定前车先停,因此,避撞安全距离Rb1的定义式为式(2)。但是在避撞模式2下,虽然Vr>0,但是本车有制动滞后,所以要判断哪辆车先停,再确定Rb2的定义式。本车制动至完全停止所需要的时间为th:th=Vh/ah+t1。前车制动到完全停止所需要的时间为tp:tp=(Vh+Vr)/ap。当th>tp,前车会先停,此时Rb2定义式为式(3);当th<tp,本车会先停,此时Rb2定义式为式(4)。
由图1可知,减速安全距离Rw2为稳态模式2和减速模式2 的划分边界条件,即Rw2为Vr>0时本车进行制动的时机。根据前文提到的高速公路安全距离标准[10]可知,即使前车速度比本车速度快,一旦2车相对距离小于Rx,本车就要进行适当制动,因此本文将Rx作为稳态模式2与减速模式2的临界条件,得到Rw2的定义式。

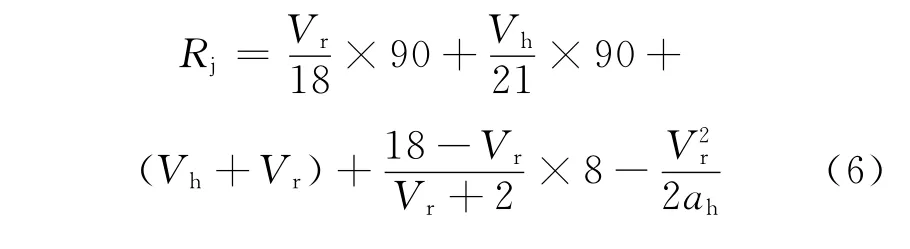
经验总结,当前车速度大于本车速度时,本车要在1个合理的距离开始加速。如果加速过早,若遇到前车突然制动,本车就会缺少足够的距离减速,这种情况是十分危险的;如果加速过晚,2车距离会逐渐拉大,前车可能超出测试范围,而无法达到跟车的目的。笔者经过大量仿真实验,最后确定加速安全距离Rj的经验公式
2 六模式ACC系统加速度算法研究
在不同的ACC 控制模式下,下位控制算法大体相似,但上位控制算法有所差异,因此笔者只对上位控制算法进行研究。根据韩国首尔大学的Moon等[11]的统计数据,驾驶员行车的纵向加速度98%集中于-2.17~1.77 m/s2,并且减速度达到-3~-4m/s2时会引起人体的不适。笔者将该统计数据作为参考,分别针对6种模式的加速度算法进行研究。
通常,在定速巡航模式下,驾驶员往往希望实际车速与设定车速尽可能接近。为此,将该模式下的加速度算法分为2部分:当实际车速小于设定车速时,取本车加速度为1 m/s2;当实际车速达到设定车速(误差在±1km/h范围内),本车加速度a的计算式为

式中:k1为比例系数,取k1值为1。
如前所述,接近前车模式下2车速度差值较大,且本车比前车速度快,同时相对距离R大于减速安全Rw1,因此需要制动本车保证安全性。为了符合驾驶员的均匀减速特性[12-13],最终过渡到稳态跟随模式,根据运动学关系,加速度a的计算式为

本文稳态跟随模式1下,2车车速较接近,但相对速度小于零,若本车保持当前车速不变,相对距离会减小,可能减小到小于减速安全距离Rw1,进入到减速模式,而无法达到稳态跟随前车的目的,因此本车要进行微小的制动,根据运动学关系得到该模式下加速度a的计算式为

式中:k2为比例系数。经大量仿真实验发现,当本车处于稳态模式1,式(9)的加速度值在-0.08~-0.12m/s2内,变化范围很小,因此取该模式下加速度a为-0.1m/s2。
本文稳态跟随模式2下,2车车速较接近,但相对速度大于零,若本车保持当前车速不变,相对距离会增大,可能增大到大于加速安全距离,进入到加速模式,而无法达到稳态跟随前车的目的,因此本车要有1个微小的加速度,综合考虑乘员舒适性与驾驶需求后将该模式下本车加速度a取为0.4m/s2。
特别地,当本车处于稳态跟随模式1或稳态跟随模式2,若此时2车速度特别接近,本车可能在稳态模式与减速模式之间频繁切换,而造成加速度较大地波动,进而导致油门开度和制动压力不稳。为此,将2车速度特别接近时本车加速度a的计算式设定为

式中:k3为比例系数,通过对控制模型进行大量仿真试验,得出k3取0.02时较为合理。
在笔者的模式划分方法中,减速模式1为稳态模式1与避撞模式1的过渡区,而稳态模式1下本车减速度接近于0、避撞模式1 下本车减速度较大,因此减速模式1的加速度需要覆盖0~-4 m/s2的范围。为保证本车在所设计的模式之间切换时的平顺性,将图1中减速模式1部分分成3区域,如图3所示,区域1与2个稳态区域相邻,视为亚稳态区域;区域2与亚稳态区域和接近模式区域相邻,视为弱减速区域;区域3与弱减速区域和避撞模式区域相邻,视为强减速区域。然后本文将得到的3 个区域进一步细分成8 部分,考虑到各部分工况的危险程度及均匀减速特性,本文将这8部分的加速度从右至左依次取为:-0.5,-0.75,-1.25,-1.75,-2.25,-2.75,-3.25,-3.75m/s2。由于该模式下的加速度为8个离散值,在实际应用时可能会产生加速度的波动,为了解决这一问题,取当前算出的的期望加速度以及在此之前3次算出的期望加速度的均值作为当前期望加速度。又由于减速模式2为稳态模式2与避撞模式2的过渡区,所以对减速模式2的控制与减速模式1相同,因此取本车在减速模式2下的加速度算法与减速模式1的加速度算法相同。
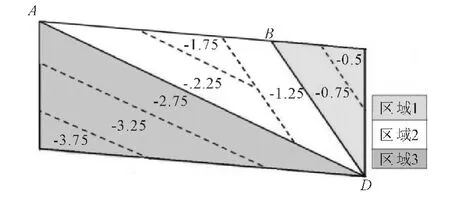
图3 减速模式加速度划分图Fig.3 Acceleration dividing of deceleration mode
当ACC系统处于避撞模式时,本车行驶工况非常危险,为确保行车的安全性,本文牺牲乘员舒适性取该模式下本车的加速度为车辆所能达到的最大制动减速度。
在加速模式下,前车车速大于本车车速,同时两车相对距离较大,因此本车可以进行适当加速。笔者综合考虑乘员舒适性与驾驶需要等要求,参照汽车行驶工况统计结果,取该模式下本车加速度a为1m/s2。
3 仿真验证
笔者将提出的模式划分方法和控制算法建立相应的Simulink 模型。考虑到PreScan 建立的场景具有可视、快速、方便、易修改等优点,笔者采用PreScan建立的仿真场景(见图4),并将Car-Sim 动态模型与PreScan中的仿真车辆相结合,对所提出的ACC系统的模式划分方法和控制算法在典型工况以及前车切入等复杂工况下的适应性进行了验证。所建立的相应的Simulink/Prescan/Carsim 联合仿真的示意图见图5。
考虑到现有ACC 控制算法在前车紧急切入工况下的不合理控制甚至是失效,笔者特别针对这一复杂工况进行仿真,来验证所提出的控制算法的合理性,具体仿真过程如下。

图4 PreScan仿真场景图Fig.4 Simulation scenario in PreScan

图5 Simulink/Prescan/Carsim 联合仿真的示意图Fig.5 The joint simulation diagram of Simulink/Prescan/Carsim
首先设定本车定速巡航模式的既定车速为70km/h、传感器测试范围为180m。然后设定车辆运动状态:前车以54km/h的初速度与本车在同一车道匀速行驶,2车初始距离为150 m。6s后前车以6m/s2的减速度进行制动,当前车车速减至36km/h时保持匀速行驶。14s时,位于相邻车道的第3辆车以36km/h的车速,变换车道插入本车与前车之间。其仿真验证结果如图6所示。这里,控制模式的代号(1~6)的定义分别为:定速巡航模式;接近前车模式;稳态跟随模式;减速模式;避撞模式;加速模式。
由图6(b)可以看出,在0~4s的过程中R>Rj,因此ACC系统处于加速模式,并以1m/s2的加速度行驶以满足驾驶需求;在4~8s过程中,前车超出传感器测试范围,因此ACC 系统切换至定速巡航模式,而由图6(c)可以看出,此时Vh<70km/h,所以本车以1m/s2的加速度行驶;8 s时,R>Rw1且2车相对速度较大,因此ACC 系统切换至接近前车模式,进行适当制动;14s时,第3辆车以与前车相同的速度插入本车与前车之间,此时相对速度不变但相对距离减小至小于避撞安全距离,因此ACC 系统切换至避撞模式,所以本车进行强制动以躲避危险工况;16s时,有Rb1<R<Rw1,因此ACC 系统切换至减速模式;18s时,有R>Rw1且两车相对速度较大,因此ACC系统切换至接近前车模式;26s时,有Rb1<R<Rw1,因此ACC系统切换至减速模式,所以本车以适当减速度制动至停止。
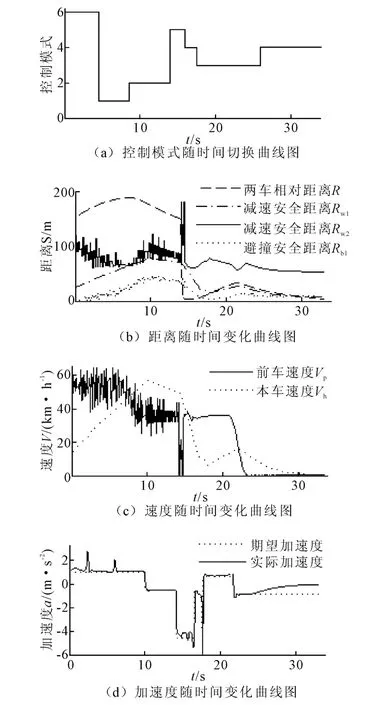
图6 仿真验证结果Fig.6 Simulation results
可以看出,在整个仿真过程中,所提出的ACC系统能够根据前方无车、前车减速和前车紧急制动等典型工况及前车切入等复杂工况进行合理的模式切换,并能根据所处模式使车辆进行适当地制动/加速,以保证行车安全和驾驶需求。
4 结束语
为了增强六模式ACC 系统在全工况下的适应性,笔者通过理论分析和仿真实验,对汽车纵向安全控制系统进行了研究。选用2车相对距离、相对速度以及本车速度作为基本参数,重新定义了模式划分方法;并研究了ACC系统的6种加速度模式,分析了模式应用的工况特点,基于驾驶员特性和汽车行驶工况统计结果,提出了相应的控制算法;最后对该ACC 系统进行了仿真验证,验证结果表明:本文提出的六模式ACC 系统,在全工况特别是前车切入等复杂工况下,较现有的六模式ACC系统表现出更好的适应性,。
笔者仅在仿真环境中对所提出的六模式ACC系统的适应性进行了验证。虽然仿真研究可以使前期的ACC 系统开发节约时间和成本,但是,仿真环境没有考虑到硬件、实车与路面等影响因素。若要投入使用,还需要进行硬件设计、硬件在环试验以及实车道路试验。
[1]CANALE M,MALAN S,MURDOCCO V.Personalization of ACC stop and go task based on human driver behavior analysis[C]∥IFAC,the 15th Triennial World Congress,Barcelona,Spain:IFAC,2002:1126-1131.
[2]PERSSON M,BOLTING F,HESSLOW E,et al.Stop &go controller for adaptive cruise control[C]∥Proceedings of the IEEE international conference on control application,Hawai’i,USA,:IEEE,1999:1692-1698.
[3]Ioannou P,Xu Z.Throttle and brake control systems for automatic vehicle following[J].California PATH Research Paper,1994,1(4):345-377.
[4]Schiehlen J,Schwertberger W.Adaptive cruise control for coaches[C]∥AVEC’96International Symposium on Advanced Vehicle Control.Aachen University of Technology,Germany,:Aachen University of Technology,1996.
[5]K Yi,D Han.A vehicle stop and go control strategy based on human drivers driving characteristic[J].Journal of Mechanical Science and Technology,2005,19(4):993-1000.
[6]张德兆,王建强,刘佳熙,等.加速度连续型自适应巡航控制模式切换策略[J].清华大学学报,2010,50(8):1277-1281.Zhang Dezhao,Wang Jianqiang,Liu Jiaxi,et al.Continuous adaptive cruise control mode switching strategy of acceleration[J].Journal of Tsinghua University,2010,50(8):1277-1281.
[7]裴晓飞,刘昭度,马国成,等.汽车自适应巡航的多模式切换控制[J].机械工程学报,2012,48(10):3901-10.Pei Xiaofei,Liu Zhaodu,Ma Guocheng,et al.Multi-mode switching control of automotive adaptive cruise[J].Chinese Journal of Mechanical Engineering,2012,48(10):3901-10.
[8]McLaughlin B,Hankey M,Dingus A,et al.Automotive collision avoidance system field operational test[R].Alexandria:NHTSA Technical Report,2005.
[9]张开斌,阮廷勇.中国六城市汽车行驶工况的测试统计分析[J].汽车研究与开发,2005(12)33-36.Zhang Kaibin,Ruan Tingyong.Statistical analysis of Chinese six city car driving cycle test[J].Automotive research and development,2005(12)33-36.
[10]于立萍.基于车距雷达的汽车安全辅助驾驶技术研究[D].北京:清华大学,2004.Yu Liping.Automotive safety driving assistant research based on vehicle distance radar[D].Beijing:Tsinghua University,2004.
[11]Moon S,Yi K.Human-centered design of a vehicle adaptive cruise control algorithm[J].Vehicle System Dynamics,2008,46(8):661-690.
[12]张 磊.基于驾驶员特性自学习方法的车辆纵向驾驶员辅助系统[D].北京:清华大学,2009.Zhang Lei.Longitudinal Vehicle Driver Assistance Systems based on the driver characteristics selflearning method[D].Beijing:Tsinghua University,2009.
[13]童宝锋,刘卫国,张君媛,等.基于目标速度的汽车ACC系统油门控制策略研究[J].交通信息与安全,2012,30(4):1674-4861.Tong Baofeng,Liu Weiguo,Zhang Junyuan,et al.ACC system's throttle control strategy based on target speed[J].Journal of Transportation Information and Safety,2012,30(4):39-43.