近景摄影测量技术在三峡库区消落带土壤侵蚀调查中的应用
2014-12-12胡云华鲍玉海贺秀斌
胡云华,鲍玉海,贺秀斌,王 蕾,甄 艳
(1.四川省第三测绘工程院,四川成都610500;2.中国科学院水利部成都山地灾害与环境研究所,四川成都610041)
一、引 言
水库消落带是指由于水位季节性涨落而使水库周边被淹没土地周期性出露水面的一段特殊区域,通常指水库最低水位线至最高水位线之间的地貌单元,是水陆生态系统的交错地带。三峡工程是当今世界最大的水利枢纽工程,建成蓄水以后,在库区形成一个最高水位175 m、最低水位145 m,垂直落差达30 m的消落带[1-2]。消落带边坡受干湿交替的周期性影响,在波浪淘蚀和降雨径流冲刷的共同作用下发生严重的土壤侵蚀[3-4]。微地貌扫描是监测三峡库区消落带地表变形、揭示土壤侵蚀过程的重要手段。由于消落带地貌发生变化的机理复杂多样,面积巨大,使用传统的RTK、全站仪、经纬仪等对进行地貌监测不仅工作量巨大,而且很难满足地表变形监测的数据需求。虽然可以使用三维激光扫描仪进行地貌扫描,但是三维激光扫描仪成本高昂,很难在库区大面积使用。
近景摄影测量是摄影测量的一个重要分支,主要研究近景物体的三维构建,地形测量等[5]。随着摄影测量软件数据处理功能的不断强大,使用传统的非专业摄影测量相机也能完成影像的采集工作,尤其是近年来国产数字摄影测量软件的不断成熟,大大降低了该方法的使用成本,使得最新的数码摄影测量技术通过一定的技术设计,既能满足平面精度要求,又可能在高程上达到变形观测的特殊要求[6-7]。杨化超等曾使用数字近景摄影测量技术进行矿山地表沉陷监测应用研究[8];Thomas等人采用专业量测相机将数字近景摄影测量技术用于大坝的变形监测[9];石必明等人将非量测数字相机数字化近景摄影测量技术用于沉陷模型的试验观测[10]。但在消落带土壤侵蚀研究领域,近景摄影测量技术还鲜有应用,三峡库区消落带面积大,地形复杂,使用普通数码相机近景摄影测量技术对三峡库区消落带进行地形数据获取具有广阔的应用前景。
本研究利用基于普通单反相机的近景摄影测量技术对三峡库区消落带进行三维建模,并利用全站仪测量验证点来计算三维建模的精度,以验证本研究所使用的近景摄影测量技术在消落带土壤侵蚀监测中的实用性。
二、研究区概况
研究区位于重庆涪陵区清溪镇境内(纬度:29.715 271 ~ 29.739 929;经 度:106.944 702 ~106.962 524),如图1所示。水位在145~175 m 波动,最低水位145 m出现在每年汛期(6—9月),最高水位出现在非汛期,达175 m。研究区坡度10°左右,土壤质地以砂质为主,只在6—9月出露。出露后,正值暴雨集中期,由于天气炎热潮湿,大雨、暴雨频繁,容易形成坡面侵蚀。同时在风和船舶的作用下形成的波浪也会对消落带进行冲刷,因此研究区土壤侵蚀是在波浪和地表径流共同作用下的一种特殊的土壤侵蚀形式。本研究选取研究区内两条侵蚀沟作为研究对象,编号分别为1号沟和2号沟。1号沟沟长3.54 m,平均宽度 0.58 m;2 号沟长 1.95 m,平均宽度 0.42 m。
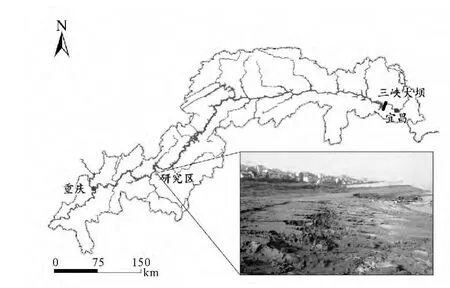
图1 研究区地理位置图
三、数据获取
1.试验设备
试验中使用的相机Canon EOS 5D Mark II是一款高性能数码单镜头反光自动对焦相机,配备有2110万有效像素的全画幅CMOS感应器,相机镜头另配备24~105 mm f/4L USM镜头,控制点测量使用南方NTS-360R激光免棱镜全站仪。
本研究使用中国测绘科学研究院研发的高分辨率遥感影像一体化测图系统PixelGrid作为数据处理软件。该软件具有非量测相机影像畸变差改正,同时完成影像旋转的功能;该软件还可以针对非航空摄影测量影像重叠度不够规则、像幅较小、相片倾角过大且倾斜方向没有规律等特点,采用基于尺度/旋转不变特征和多基线影像匹配技术的全自动链接点选取配准等功能[11]。
2.数码相机检校
普通的数码相机的主距f和像主点在像片中心坐标系里的坐标(x0,y0)都是未知的,根据影像无法直接量测以像主点为原点的坐标,必须进行内定向。同时非量测相机的镜头畸变差较大,这是因为透镜成像时,视场的不同区域所形成的影像放大率不同而产生扭曲,属于一种影像的几何失真,这种扭曲或失真在越靠近影像边缘的地方就越严重。为了恢复每张影像摄影中心与像片之间的相对几何关系,提取光学畸变系数,以获得非测量相机摄影测量处理的必要参数,数码相机的校验工作必不可少[12-13]。
根据所需要使用的硬件条件,数码相机的检校的方法主要可以分为:基于标准参照物的方法、自检校和基于主动视觉的检校方法。相机的检校需要专业的三维控制场和二维控制场,在测量区域内,安设控制点,利用全站仪辅助测量控制点的几何坐标,将几何坐标带入图像,可以求解相机形变参数并对影像进行几何校正。在本研究过程中,由于没有设置专门的校验场,因此直接引用中南大学邹峥嵘教授团队建立的同型号Canon EOS5D相机检校结果[14],见表1。

表1 Canon EOS 5D相机检校参数
3.控制点布设与影像获取
在1号沟和2号沟内选择尽量均匀布设的控制点,利用塑料图钉对控制点进行标注。本研究中,共在主沟和副沟设立个34个控制点,如图2所示。在主沟沟头选择一个位置较高的点架设全站仪,设定相对的平面坐标系,将全站仪所在点坐标设置为(100,100,100),使用免棱镜模式,全站仪激光直接瞄准大头针顶部中心,坐标测量使用测回法,每个控制点测3个测回,最后控制点结果取平均值,见表2。获取完控制点以后,利用免棱镜模式随机测量了个122验证点,用以对摄影测量获取的DEM数据进行精度验证。
进行摄影时,为了尽量保证多幅影像获取时的角度、高度一致,保持相机的稳定性,尽量使摄影照片接近于航摄影像,利用三角架对相机进行固定,并对摆放三角架的地面进行平整,利用标尺作为参照,拍照时平行移动三角架,使获取的两幅相邻影像的重叠度在80%以上,最终共获得研究区影像5景。

图2 控制点测量及控制点分布图
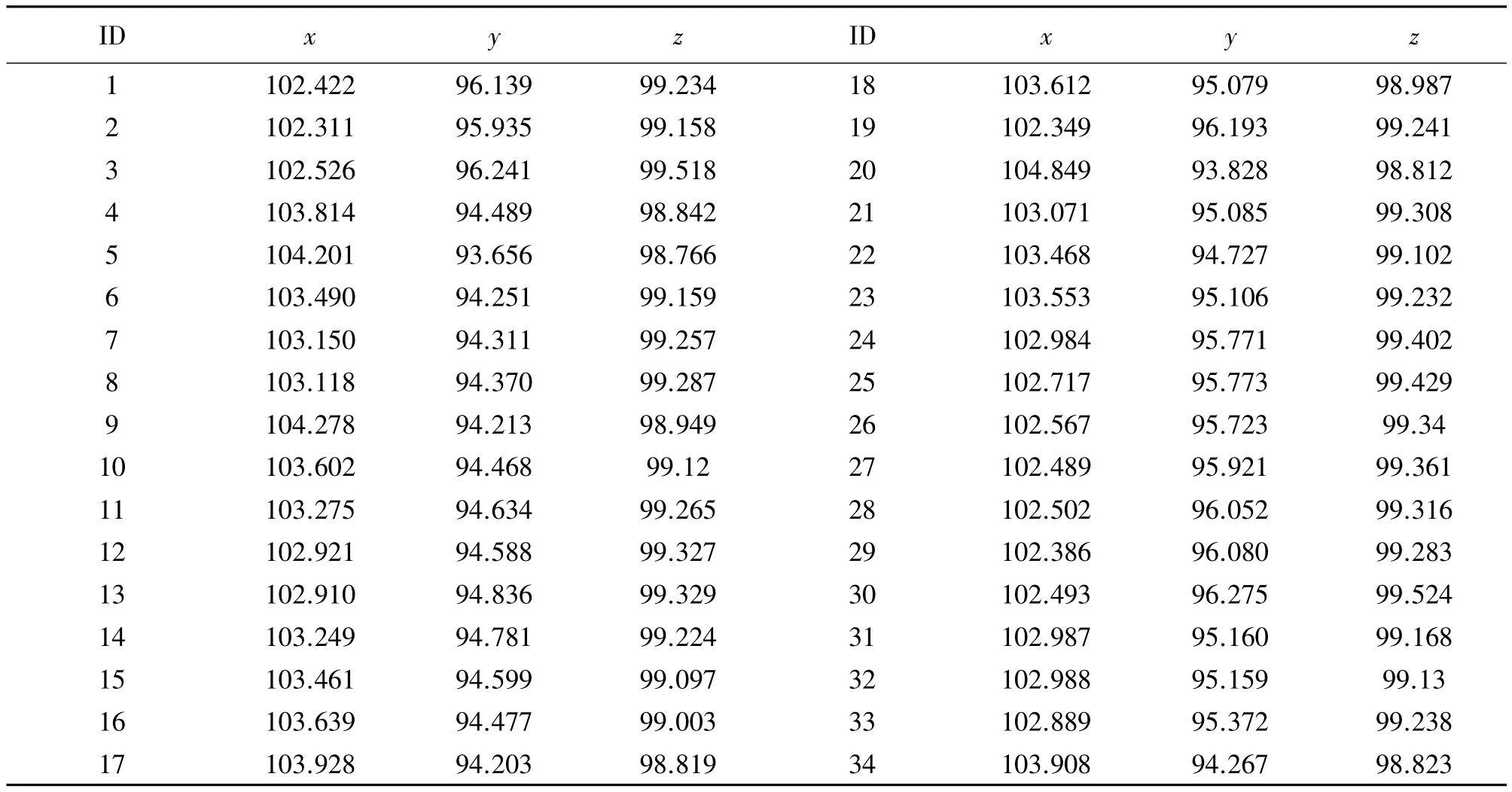
表2 控制点编号及其坐标
四、数据处理
使用普通数码相机进行近景摄影测量图像处理流程如图3所示。
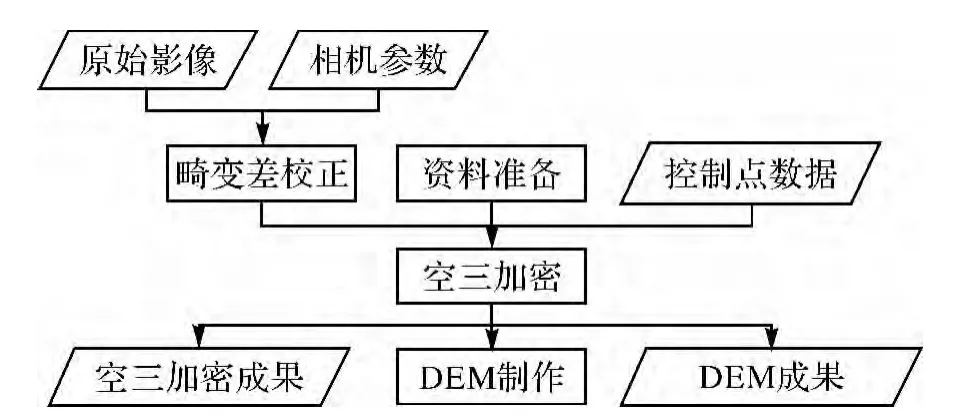
图3 近景摄影测量图像处理流程
1.原始影像和相机参数的获取
获取照片后,读取拍照时的相机参数(见表3),主要相机参数有:宽度、高度、水平分辨率、垂直分辨率、位深度、焦距。结合检校结果的主点坐标(x0,y0)、主距(f)、畸变系数(k1)、摄影中心坐标(Xs,Ys,Zs)等参数,建立相机检校文件(*.cam格式)。
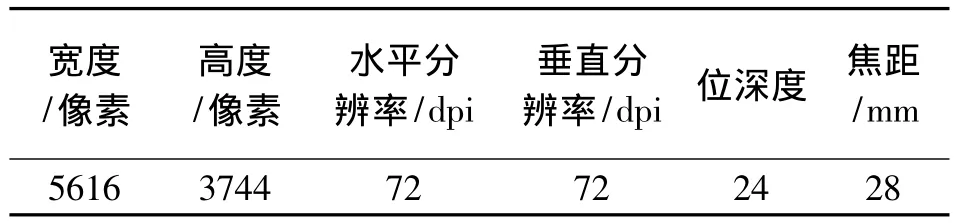
表3 相机获取的影像参数信息
2.畸变差校正
由于拍摄的相机为非量测相机,其像片存在边缘畸变,需对其进行畸变差校正。利用中国测绘科学研究院研发的高分辨率遥感影像数据一体化测图系统PixelGrid对照片进行畸变差校正,选择好相机参数文件选择后,在相机参数单位中选择该测区相机参数文件的单位(mm)。将所有影像添加入软件,可以实现影像的一次性畸变差校正。
3.建立测区工程
在设置航摄区域必要参数模块中,首先设置工程目录名,将摄影比例尺设置为3000,然后设置相机检校参数文件,为了提高模型连接成功率,将内定向限差、相对定向限差和模型连接限差都设定为0.02 mm,设置平差迭代允许最大次数为20,平差迭代停止时变化量0.005。建立好测区工程文件后,直接导入全站仪测量的控制点数据,建立地面控制文件。
4.空三加密
进行空三加密前,首先进行生成金字塔影像和索引影像的操作,金字塔影像在匹配相对定向点时需要使用,索引影像是在浏览影像时所生成的文件。随后进行影像的自动内定向操作,相对定向完成后,便可开始进行模型连接,完成连接后,进行航带初始点提取;然后进行全自动航带间转点及数据整理,自由网平差;自由网平差合格后进行控制点提取及区域网平差;再点击平差工具,进行区域网平差解算;解算后,查看其控制点残差,如果控制点超限,则需对其进行修改再平差,直到连接点及控制点都满足要求为止,解算合格后,就完成了整个测区的空三加密。
5.DEM匹配及编辑
导入空三加密成果,输入测区航向重叠率、测区平均高程和测区旁向重叠率进行工程及格式转换,生成 PixelGrid工程文件。影像格式转换完成后,进入PixelGrid主模块,然后进行核线影像生成,设置影像匹配参数,输入每个像对切除影像的边缘像素值,再设置该区域的DEM格网间隔为0.05 m,随后开始进行DEM自动匹配。DEM自动匹配完成后,点击“DEM拼接生成”按钮,开始把匹配好每个像对的DEM数据拼接成一个大DEM文件,如图4所示。

图4 拼接完成的研究区DEM
五、结果分析
1.DEM精度验证
基于全站仪随机测量的122个验证点,利用ArcGIS软件的Extract Value to Points工具提取其DEM上的高程信息,分别利用平均误差ME、中误差RMSE和误差标准差STD来估算获取的DEM数据的准确度。平均误差是数据和真实值的误差的平均值。中误差是衡量观测精度的一种数字标准,亦称标准差或均方根差,它是相同观测条件下的一组真误差平方中数的平方根,误差标准差体现的是误差的离散程度,从误差标准差可以看出数据误差的波动程度。它们的计算公式分别如下[15]
式中,εi表示实测值(测量结果)与采样值(DEM结果)的差;n代表采样点个数。对全站仪测量验证点高程值和近景摄影测量建立的DEM上提取的高程值的平均误差、中误差、误差标准差进行计算,计算结果见表4。测量误差的平均值为1.231 7 cm,最大最小值-3.73 cm,最大值 0.699 5 cm,平均误差-1.23 cm,中误差 1.638 7 cm,误差标准差 1.080 9 cm。从误差结果来看,利用本研究所使用的方法生成的DEM高程值数据和实际测量结果的误差在厘米级,只能满足较粗略的土壤侵蚀调查需求,测量结果可以用于提取侵蚀沟的边界、面积、土壤侵蚀量的估算等应用分析。

表4 校正和未校正的坡度数据误差指标分析结果 cm
2.误差的空间分布
在计算结果的误差当中,可以看出大部分误差结果为负值,即实际测量结果高程值小于DEM提取高程值,在ArcGIS软件中,利用二阶反权距离插值方法对误差计算结果进行空间插值,并按正负值进行彩色分级显示,结果如图5所示。可以看出,仅在个别验证点处,实际测量高程值大于DEM所提取的高程值,在大部分地区,测量结果要低于DEM观测值。为了分析误差大小的空间分布状况,利用反权距离插值方法对误差绝对值进行空间插值,如图5所示,从图中可以看出,误差比较大的地区都分布在沟头或者沟中部相对较深的地区。从这个结果可以看出,利用摄影测量所获得的DEM数据,在刻画地貌形态时,对于影像阴影覆盖的沟底地区,摄影测量产生的误差较大,容易高估出地表实际的高程,不能反映地表的细节信息。

图5 误差正负值分布图和绝对误差分布图
六、结论与建议
本研究利用近景摄影测量技术,使用普通单反相机获取的影像结合全站仪测量的地面控制点在PixelGrid软件中对三峡库区消落带地貌进行三维建模,并利用全站仪测量的验证点来计算获取的DEM数据的精度。从结果可以看出,利用本研究所使用的近景摄影测量技术可以从普通单反相机照片中提取地貌DEM信息,但由于相机校准和实际软件处理效果的限制,影像所获取的DEM数据平均误差在1.2 cm左右,而且由于影像阴影和相机倾角等原因,获取数据在沟底和地貌起伏较大的地区误差较大,无法较精确地还原地貌信息。本研究所使用的技术方法可以用于较粗略的消落带土壤侵蚀调查,可以用于提取土壤侵蚀沟的边界、面积、深度、坡度、土壤侵蚀量等信息,结合多期调查结果,还能进行土壤侵蚀沟发育过程的粗略监测。基于近景摄影测量技术研究简单、可靠并快速的普通数码相机的摄影测量方法,将是进一步研究的方向。
[1]刁承泰,黄京鸿.三峡水库水位涨落带土地资源的初步研究[J].长江流域资源与环境,1999,8(1):75-80.
[2]张信宝.关于三峡水库消落带地貌变化之思考[J].水土保持通报,2009,29(3):1-4.
[3]鲍玉海,贺秀斌.三峡水库消落带土壤侵蚀问题初步探讨[J].水土保持研究,2011,18(6):190-195.
[4]鲍玉海,唐强,高银超.水库消落带消浪植生型生态护坡技术应用[J].中国水土保持,2010(10):37-39.
[5]冯文灏.近景摄影测量:物体外形与运动状态的摄影法测定[M].武汉:武汉大学出版社,2002.
[6]黄桂平.数字近景工业摄影测量关键技术研究与应用[D].天津:天津大学,2005.
[7]张祖勋.数字摄影测量的发展与展望[J].地理信息世界,2004,2(3):1-5.
[8]杨化超,邓喀中,张书毕,等.数字近景摄影测量技术在矿山地表沉陷监测中的应用研究[J].中国图象图形学报,2008,13(3):519-524.
[9]THOMASK,HANSGM.Photogrammetric 3Dpoint determination for dam monitoring[J].Optical 3D Measurement T echniques,1995,14(10):161-168.
[10]石必明,俞启香.远距离保护层开采煤岩移动变形特性的试验研究[J].煤炭科学与技术,2005,33(2):39-41.
[11]贾娇,艾海滨,张力,等.应急响应中PixelGrid无人机遥感数据处理的关键技术与应用[J].测绘通报,2013(5):62-65.
[12]侯文广.基于普通数码相机实现三维重建的应用研究[D].武汉:武汉大学,2006.
[13]崔红霞,孙杰,林宗坚,等.非量测数码相机的畸变差检测研究[J].测绘科学,2005,30(1):105-107.
[14]王成亮.基于普通数码影像的近景摄影测量技术研究与应用[D].长沙:中南大学,2006.
[15]刘飞,范建容,郭芬芬,等.藏北高原区DEM高程与坡度值提取的误差分析[J].水土保持通报,2011,31(6):148-151.
