与非合作目标交会的追踪卫星轨道L2-L∞增益控制
2014-12-05孙兆伟仲惟超
邓 泓 孙兆伟 仲惟超 张 健
1. 上海卫星工程研究所,上海200240
2. 哈尔滨工业大学卫星技术研究所,哈尔滨150001
3. 北京空间飞行器总体设计部,北京100094
空间非合作目标是指一类不能提供有效合作信息的空间飞行物,包括故障或失效卫星、空间碎片和对方卫星等[1]。与这类空间非合作目标进行交会是完成在轨服务、空间垃圾清除和空间拦截等空间任务的基础[2]。当追踪卫星与对方卫星这类空间非合作目标交会时,目标卫星为了逃避追踪可能存在轨道机动。本文主要针对这类情况的空间交会,研究了追踪卫星的轨道控制方法。
随着推力可连续变化推进器的出现,基于控制理论的变推力轨道控制方法逐渐取代传统的冲量式轨道控制方法,成为近年来研究热点,如文献[3 -4]分别采用自适应控制和滑模控制方法为空间交会设计了轨道控制器。这类方法通常可对系统的稳定性进行设计和分析,因而具有更高的控制精度。当目标卫星存在轨道机动时,传统的Hill 方程或是椭圆相对轨道方程不再适用。为此,本文建立了在惯性系下描述的相对轨道近似模型。由于目标卫星的非合作性,其轨道机动的大小是不可测得的,故本文将目标卫星轨道机动处理成系统干扰。为了抑制干扰,通常可采用鲁棒控制器,如文献[5]研究了系统存在控制输入干扰时追踪卫星的鲁棒H∞轨道控制方法;文献[6]考虑了干扰对系统输出的L2增益,提出了一种自适应飞行控制方法;文献[7]进一步研究了存在参数不确定性和控制干扰时的最优控制。此外,执行器的输出一般都有幅值,即具有饱和特性。若不考虑该特性可能导致控制器在实际应用中精度降低甚至失效。因而有必要研究系统在该特性下仍能渐近稳定的控制器设计方法,如文献[8 -9]均针对控制输入受限下的航天器姿态调节和姿态机动控制问题提出了相应的控制器设计方法。由于这类任务的快速性要求,可考虑系统的有限时间性能,如文献[10]中以系统有限时间性能为优化指标进行控制器的设计。
本文综合考虑上述所有条件,以系统有限时间性能为优化指标,提出了L2-L∞增益控制器设计方法,并基于线性不等式(Linear Matrix Inequality,LMI)技术证明了采用该控制器的闭环系统在执行器饱和特性下是渐近稳定的。
1 相对轨道模型
在地心惯性坐标系中[11],目标卫星和追踪卫星的轨道动力学方程分别为:

式中,μ 为地球引力常数,x,y,z 为卫星在惯性系中的位置,r 表示卫星地心距,m 表示卫星质量,f 表示卫星轨道控制力,Δf 表示干扰力量,下标“t”代表目标卫星,下标“c”代表追踪卫星。
令xe,ye,ze表示两星相对位置在惯性系下的分量,假设两星的相对距离远远小于它们的地心距,则有
同理,对另两轴同样有下式成立:
在追踪卫星逐渐逼近目标卫星的过程中,其地心距rc是时变参数。因此将式(2 ~4)中包含rc的时变参数分成2 部分:1)时不变的参数;2)时变参数,可视作模型的不确定性,即

式中,rc0为初始时刻追踪卫星的轨道半径,δr(t)为由轨道半径变化引起的时变参数,满足表示其变化幅值。
由于目标卫星的非合作性,其轨道控制力的变化是无法测得的,于是将目标卫星的轨道控制力视作模型的扰动。令系统状态向量、轨道控制力向量、测量输出向量和干扰向量分别为:

并考虑追踪卫星和目标卫星质量的不确定性:

式中,mc0,mt0为质量的初始值,δ1(t),δ2(t)分别满足和为幅值。
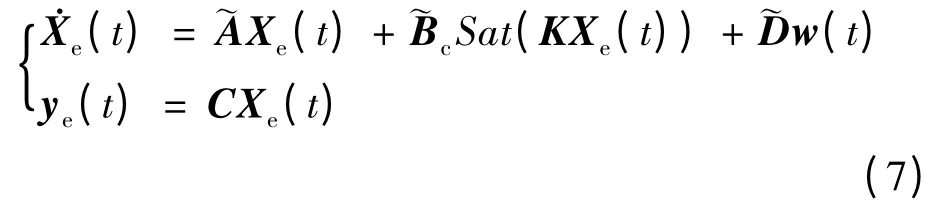
结合式(1 ~5),则系统模型可写为:


In表示维数为n 的单位阵,0m×n表示维数为m × n的零矩阵。不确定部分ΔA(t),ΔBc(t)和ΔD(t)具有如下形式:

式中,H =[H0H0H0H0],H0=[03×3I3]T,

可见,FT(t)F(t)≤I。
在实际应用中,卫星轨道推进器的推力通常都有幅值,即具有饱和特性。考虑该特性:


本文采用状态反馈控制即uc(t)= KXe(t),K为控制增益阵。故闭环系统可写为:
2 L2 -L∞增益控制器设计
2.1 控制器设计目标
为抑制干扰对系统的影响,本文考虑了系统的L2- L∞增益,即能量- 峰值(Energy - to - Peak,EP)增益,其具体定义如下:


上式等价于,在零初始条件下 ye(t)∞≤β w(t)2。
当追踪卫星执行与非合作目标卫星的交会任务时,通常要求它能在燃料有限的情况下于有限时间内完成。因此,考虑有限时间内系统状态和控制输入向量的线性二次型性能:
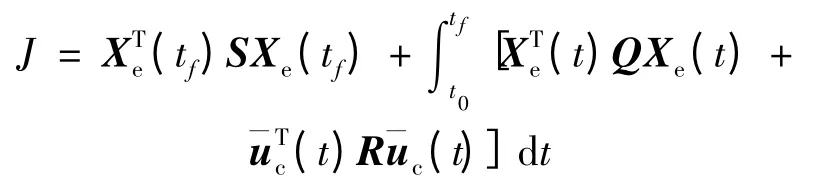
式中,S,Q 和R 均为正定对称矩阵,t0和tf分别表示初始时刻和终端时刻。
因此,本文控制器设计目标可描述为:针对不确定饱和系统(7),设计控制增益阵K,使得闭环系统渐近稳定、系统的EP 增益满足约束(9)且系统的有限时间性能J 达极小值。
2.2 控制器设计
为证明后文提出的定理,给出以下引理。
引理1[12]:设a,b 为具有相同维数的向量,对于具有相应维数的任意矩阵Γ 满足ΓTΓ ≤I,则有2aTΓb ≤aTa + bTb。
引理2[12]:设M 和N 为实数矩阵,则对任意矩阵Γ 满足ΓTΓ ≤I,存在实数ε >0 满足MΓN +NTΓTMT≤ε-1MMT+ εNTN。
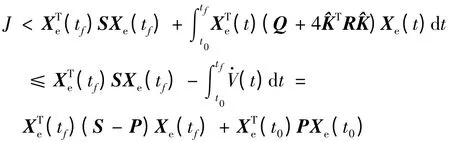
定理1 考虑不确定饱和系统(7),如果存在正定对称矩阵P 满足



由引理1 可知:

故当w(t)= 0 时,

对于有限时间性能J,当R 为对角阵时有
当w(t)≠0 时有:

式中:ξT(t)= [XT(t) wT(t)]。则由式(10)可知,(t)- wT(t)w(t)<0 。对该式从0 到τ 积分
并利用零初始条件,可得:


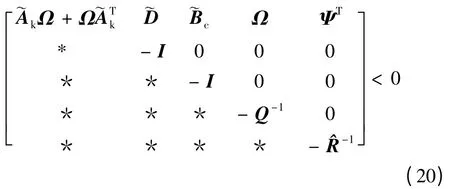
定理2 :考虑不确定饱和系统(7),如果存在实数β >0,μ >0,α >0,正定对称矩阵Ω 和矩阵Ψ 满足

式中,∑= AΩ+ΩAT+BcΨ++μHHT。则存在控制增益阵K 使该系统渐近稳定、系统的EP增益满足式(9)、有限时间性能J 有上界J <α,且控制增益阵K 可由下式计算:

证明:定义Ω = P-1,Ψ =。由定义可知式(16)和(19)均成立。用矩阵J1= diag(Ω,I)对式(10)做全等变换并利用Schur 补定理[9],则有:
将不确定结构(6)代入上式可得,

式中,
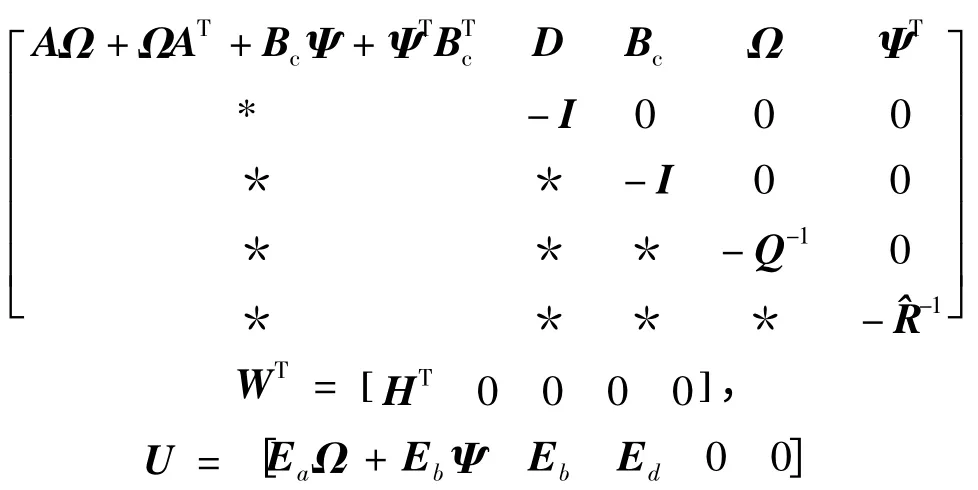
由引理3 知,存在实数μ >0 ,使得当式(15)成立时式(21)成立,即式(15)成立时式(10)必然成立。用矩阵Ω 对式(12)做全等变换并利用Schur补定理可得到式(17)。根据Schur 补定理式(18)等价于(t0)PXe(t0)<α,故性能J 有上界α。
推论1 求解如下凸优化问题可获得有限时间性能的最优值和控制增益阵:

即对于给定β 寻找满足不等式(17)~(20)的实数μ和矩阵S-1,Q-1,^R-1,Ω,Ψ 使得α 值最小。
3 仿真分析
追踪卫星质量为500kg,其不确定度为0.1,执行器推力幅值为500N,初始轨道参数见表1。目标卫星质量为500kg,其不确定度为0.1,执行器推力幅值为100N,初始轨道参数见表1。追踪卫星相对目标卫星的初始相对轨道状态为(42.00,11.15,-72.48)km 和(-68.68,-32.32,-43.78)m/s。模型的不确定度为

表1 追踪卫星和目标卫星轨道参数
给定系统的EP 增益为β = 0.1 ,利用MATLAB中的LMI 工具箱求解推论1,可得:
则由式(47)计算可得控制增益阵:

仿真中,给定追踪卫星的控制干扰始终为控制输入的10%,目标卫星轨道推力在1000s 内的输出程正弦变化,即

根据上述仿真参数和设计的控制器,可得仿真结果如图1 ~3 所示。图1 为追踪卫星三轴控制输入的变化图。在仿真初期,2 星相对位置较大,理论计算的控制输入也大。由于推进器的饱和特性,实际的控制输入一直为推进器的推力幅值;随着追踪卫星逐渐逼近目标卫星,当理论计算的控制输入小于推进器幅值时,实际的控制输入就等于理论计算的控制输入。图2 和3 分别为相对位置和相对速度变化图。由图可知,相对位置和相对速度均快速收敛,2000s 时控制精度分别为1.7m 和0.01m/s。由以上仿真结果可知,当目标卫星存在轨道机动时,对于带饱和执行器追踪卫星的轨道控制,本文设计的控制器是有效的。

图1 追踪卫星三轴控制输入

图2 相对位置
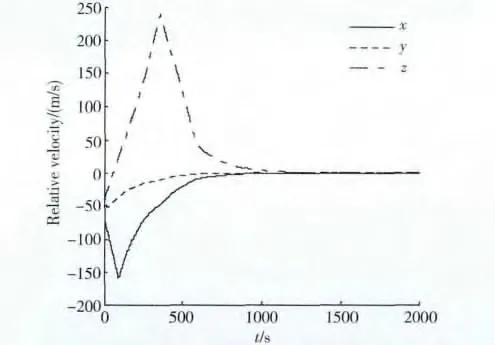
图3 相对速度
为进一步验证本文设计的控制器对参数不确定性以及干扰的鲁棒性,在仿真中令追踪卫星和目标卫星质量的不确定度均增大为0.5,追踪卫星的控制干扰增大为控制输入的30%,目标卫星的推力幅值增大为150N。仿真结果表明,相对位置和速度仍能快速收敛并稳定,且2000s 时的控制精度分别为2.1m 和0.013m/s。可见,本文设计的控制器对参数不确定性和干扰具有较好的鲁棒性。
4 结论
考虑参数不确定性和推进器的饱和性,将非合作目标卫星的轨道机动视作系统干扰,以燃料消耗和时间为优化指标,提出了一种适用于追踪卫星的L2-L∞增益轨道控制器设计方法。仿真结果表明,当目标卫星存在未知轨道推力时,系统能快速收敛并稳定,对系统的不确定性和干扰具有较好的鲁棒性,且控制器结构简单,便于工程实现。本文研究的干扰为能量有界时的控制器设计方法,为进一步提高控制器的适用范围,未来可研究干扰为幅值有界时的控制器设计方法。
[1]车汝才,张洪华. 追踪卫星跟踪空间非合作目标的相对轨道设计[J]. 航天控制,2006,24(5):40-45.(Che Rucai ,Zhang Honghua. Relative Orbit Design of a Chaser Tracking a Non-cooperative Target in Space[J]. Aerospace Control,2006,24(5):40-45.)
[2]Zhang Dawei,Song Shenmin,Pei Run. Safe Guidance for Autonomous Rendezvous and Docking with a Noncooperative Target[C]. AIAA Guidance,Navigation,and Control Conference,Toronto,2010.
[3]P Singla,K Subbarao,J L Junkins. Adaptive Output Feedback Control for Spacecraft Rendezvous and Docking under Measurement Uncertainty[J]. Journal of Guidance,Control,and Dynamics,2006,29(4):892-902.
[4]B Ebrahimi,M Bahrami,J Roshanian. Optimal Sliding-mode Guidance with Terminal Velocity Constraint for Fixed-Interval Propulsive Maneuvers[J]. Acta Astronautica,2008,60(10):556-562.
[5]Gao Huijun,Yang Xuebo,Shi Peng. Multi-Objective Robust H∞Control of Spacecraft Rendezvous[J].IEEE Transactions on Control Systems Technology,2009,17(4):794-802.
[6]Yang BongJun,Yucelen Tansel,Shin JongYeob,Anthony J. Calise. An LMI-based Analysis for Adaptive Flight Control with Unmodeled Input Dynamics[C].AIAA Guidance,Navigation,and Control Conference,Toronto,2010.
[7]黄静,刘刚,马广富. 含不确定性的绳系卫星姿态的鲁棒最优控制[J]. 宇航学报,2012,33(10):1423-1431.(Huang Jing,Liu Gang,Ma Guangfu. Nonlinear Robust Optimal Attitude Tracking of Tethered Satellite System with Uncertainties[J]. Journal of Astronautics,2012,33(10):1423-1431.)
[8]Imran Ali,Gianmarco Radice,Jongrae Kim. Backstepping Control Design with Actuator Torgue Bound for Spacecraft Attitude Maneuver[J]. Journal of Guidance,Control,and Dynamics,2010,33(1):254-259.
[9]王景,刘良栋,李果. 控制输入受限情况下卫星姿态的鲁棒自适应控制[J]. 宇航学报,2006,27(4):588-593.(Wang Jing,Liu Liangdong,Li Guo. Robust Adaptive Attitude Control of Satellite Under Control Input Saturation[J]. Journal of Astronautics,2006,27(4):588-593.)
[10]李四平,刘锦阳,国凤林,许金泉. 轨道机动的时间能量综合最优控制[J]. 宇航学报,2010,31(1):137-142. (Li Siping,Liu Jinyang,Guo Fenglin,Xu Jinquan. Time-Energy Comprehensive Optimal Control of Orbital Maneuvering[J]. Journal of Astronautics.2010. 31(1):137-142.)
[11]徐光延,项峰,谌颖. 高阶带谐摄动下卫星相对运动精确动力学模型[J]. 宇航学报,2012,33(9):1203-1209.(Xu Guangyan,Xiang Feng,Chen Ying. Exact Dynamic Model of Satellite Relative Motion under Arbitrary Zonal Harmonic Perturbations[J]. Journal of Astronautics,2012,33(9):1203-1209.)
[12]俞立. 鲁棒控制——线性矩阵不等式[M]. 北京:清华大学出版社,2002:25-26. (Yu Li. Robust Control:Linear Matrix Inequality[M]. Beijing:Tsinghua University Press,2002:25-26.)
