一种舰船灯光通信系统研究
2014-12-05胡定军刘良顺
胡定军,刘 铭,刘良顺
(1.镇江船艇学院,江苏 镇江212003;2.中国人民解放军94679 部队,江苏 南京210038)
0 引 言
灯光通信作为舰船最常见的通信方式有系统简单、使用方便等优点,所以其尽管是一种古老的通信方式,今天仍然在舰船的通信系统中占有重要地位。但随着技术的发展,跟其他通信方式相比,灯光通信需要专业培训人员、信息传递速率太低的缺点比较明显,和现代自动化发展趋势相背。为此研制一套自动化灯光通信系统,其不仅具有传统灯光通信系统简单、使用方便等优点[1],而且无需专业人员参与,能较大幅度提高通信速率。
1 灯光通信系统结构组成
舰船灯光通信系统由灯光自动拍发子系统、灯光自动接收子系统及伺服子系统组成,如图1所示。
灯光自动拍发子系统主要由计算机灯光发送软件、LED 发射控制器及LED 信号灯组成。计算机负责将所要发送的信息采用莫尔斯码进行编码,并送入灯光信号控制器,在灯光信号控制器的作用下,信号灯按照特定的编码进行闪烁,发射信号,实现灯光信号的自动拍发。

图1 总体系统结构图Fig.1 The structre of ship light communication system
灯光自动接收子系统主要由高速摄像机、高速图像采集卡、灯光图像识别及接收软件组成。利用高灵敏、高帧频、可开窗、带红外接收的CMOS 高速摄像机作为信号接收传感器,接收图像实时采集到计算机内,经专门图像分析软件识别发射信号灯方位,处理灯光脉冲强度变化,自动识别和提取光脉冲宽度和强度信息,转换成莫尔斯码并在显示屏上显示相应字母和数字,实现灯光的自动接收与识别。
伺服子系统包括变焦摄像机、图像显示软件模块、电控二维转台及转台控制器,利用变焦摄像机捕捉对准LED 光源信号,计算机内实时显示图像;实现实时对准对方目标,保证对方的光源始终位于高速摄像机的视野范围。
系统设计时需将LED 光源、变焦摄像机、高速摄像机集成在电控二维转台,三者同轴,实现LED光源信号发射与接收及瞄准器一体运动。
1.1 LED 智能信号灯的设计
灯光通信的LED 智能信号灯是灯光自动拍发子系统的前端显示关键部位,考虑到与原有灯光通信系统兼容,LED 智能信号灯既可以通过人工手动扳下扳手控制光源亮灭,也可以接收控制板电路的信号自动控制光源的亮灭。
LED 智能信号灯主要由控制模块、电源模块、光源模块等单元组成。控制模块主要是用来控制信号灯工作(光源的亮灭);光源模块由3 组18 个高亮度发光二极管串并联组成,1 个(或1 组)发光二极管的损坏并不影响整个信号灯的工作,可靠性好;电源模块是将220 V 交流电转换为24 V 直流电,给信号灯供电,使其正常工作;24 V 的直流电源可以直接给信号灯供电。主要通过RS232 接口与计算机的串口相连实现串口通信,计算机通过串口写入数据将二进制代码传输到LED 智能信号灯的数据接口,通过控制模块将二进制代码转换为信号灯的亮灭交替变化,其工作原理图如图2所示。

图2 控制模块的工作原理图Fig.2 The principle of control model
控制模块的电路板的CPU 采用AT89S52 单片机作为中心处理器,主要完成控制片外存储器24C1024、控制光源工作、串口数据的发送和接收等功能;片外存储器24C1024 存储用户编辑的数据(不大于200 组),避免断电后数据丢失;与计算机的串口通信采用中断方式,串口只要有数据就会及时接收;AT89S52 单片机对接收到的二进制码进行分析和处理,通过内部的时钟发生器定时对;单片机的特定外置I/O 口输出端通过电流驱动电路后控制光源信号灯的有规律亮灭设定0 为灭,1 为亮。
在灯光通信的发送阶段,用户在灯光通信软件的发送文本编辑框中输入需要发送的通信信息或者选取常用的勤务符号和常用短语,则计算机将通信信息依次逐字进行二进制编码操作,计算机串口与LED 智能信号灯串口相连进行串口通信,计算机将二进制编码发送到智能信号灯的控制模块CPU,根据这些二进制编码AT89S52 单片机通过内部石英时钟发生器定时对单片机的外置I/O 口进行相应的0、1 输出控制,通过电流驱动电路后控制信号灯的定时亮灭,从而实现通信信息的自动发送[2]。
1.2 自动接收机的设计
灯光自动接收机子系统接收信息时,变焦摄像机主要将接收到的图像实时采集到计算机显示,用于对准目标,高速摄像机和高速采集卡实时记录智能通信信号灯的亮灭闪烁情况,并将所记录的视频图像信息传送到接收机机的图像识别处理软件系统进行图像分析和图像处理,具体工作包括目标信号源的有效检测、噪声去除和二进制代码生成,根据按一定规则制定的加密算法对此二进制代码进行解密操作,然后通过字符编码数据库将信息进行译码操作,即把二进制代码还原为通俗的字符信息,最终转换成文字信息显示到显示屏上来,从而实现通信信息的自动接收[3],整个信息接收流程如图3所示。

图3 灯光接收流程Fig.3 The process of ship light receiver
跟踪伺服子系统中高速摄像机、变焦摄像机随电控转台同轴运动,转台控制器灵活控制转台的俯仰和水平方位角,通过计算机内显示对方图像画面和控制手柄人工控制转台捕获、对准及跟踪目标。
1.3 高速摄像机的设计
根据设计参数要求,灯光通信自动接收机需要在舰船摇晃小于10°时,能够进行人工对准,约10个汉字拼音/min,或者30 ~300 个莫斯码/min,通信速率可调。
1)采样频率必须足够高,也就是相机的帧频必须足够高。10 个汉字/min,1 个汉字平均少于5 个字母,则可换算为要发50 个字母/min,每个字母平均1.2 s。以莫斯码中的最短时间短亮为单位计算,最长的为数字0,占21 个单位长度,如果在1.2 s 内发完则单位长度约为60 ms。由于莫斯码只有4 种长度,亮的信号只有1 个单位长度的点,3 个单位长度的划2 种,暗的信号只有1 个单位长度的码间间隔和5 个单位长度的字母间间隔,只要能区分开1 个单位长度和3 个单位长度,即可达到系统要求。实验证明,当帧长度小于最小单位长度的1/3 即20 ms 时即可鉴别出点和划,考虑到系统冗余,最终确定相机帧频为100 帧,帧长10 ms。
2)视场角必须足够大。舰船晃动为10°时,在瞄准辅助装置的配合下,通过手持对准,预计可稳定在5°以内。预选定的相机感光器大小为1/3 英寸,采用25 mm 焦距的镜头时其视场角约为6°。
工业相机的最大采集频率与目标灯光信号的闪烁频率有直接的关系,根据Nyquist 采样定律,相机的最大采集频率必须大于等于目标灯光信号最大闪烁频率(灯光通信最小单位周期的倒数)的2 倍,才能保证采集过程中不会发生采样信号混叠的现象。在实际的灯光通信过程中,信号灯光源的亮度残留现象不可避免。故所设计的通信信号光源采用的LED 发光二极管组,LED 发光二极管的亮灭变化比传统信号灯中的钨丝白炽灯要迅速很多,但是依然不可避免有一定程度的亮度残留,因此所选取的相机最大采集频率必须要比理论计算值要大一些。理论上讲,相机的采集频率越大越好,但是考虑到频率增大其价格极大上涨,且一般而言采样频率大相机耗能也较大,综合以上各种因素,相机选用德国IDS 公司的UI-5220CP 型高帧频工业相机[4]。
2 系统接收端软件设计
由于实际船艇灯光通信中背景环境复杂多变,未知性非常大,难以对背景环境进行有效建模。为方便和简单起见,采用人工分为以下2 种采集方式:
一是舰船晃动不大,利用先验知识在图像第1帧进行确定目标基本轮廓的方法,具体而言是用户首先在第1 帧视频图像中用鼠标划取1 个包含目标信号灯在内的矩形框,通过在此矩形框内提取目标信息进行分析和参数设定后分割出目标信号灯,将目标信号灯进行建模锁定并将相关目标参数存储到系统内存中,此后通过自动目标检测跟踪技术使得目标框始终能够自动定位并检测出目标信号灯[5]。
二是为了能够在可能大幅度摇晃的船上跟踪到目标信号灯,采用目标质心信息匹配和帧间图像跟踪匹配相结合的方法。目标质心信息匹配方法对于晃动幅度比较大的目标信号灯具有较好的跟踪效果,但是在目标信号灯闪烁或是其他灯光干扰等因素的情况下,很容易丢失目标;帧间图像跟踪匹配是比较常用的通用视频图像跟踪算法,它是依据视频采集频率一般较高,使得相邻两帧视频图像之间的目标信号灯的位置、大小、形状等信息相差不大,可以充分利用前一帧目标信号灯的相关特征信息来计算出当前帧的目标信号灯的位置、大小、形状等信息[6],从而实现目标的连续跟踪,但是帧间图像跟踪匹配方法很容易造成误差的累积,长时间跟踪非常容易产生目标漂移,造成目标丢失和误跟踪。经过船艇实际的灯光通信,实验将这2 种方法相结合,相互补充,对于目标信号灯的检测和跟踪具有很好的效果。
在实际视频图像目标跟踪过程中,根据上一帧的目标框计算当前帧的框内光强,通过对此光强值进行阈值处理来判断出框内所包含的目标信号灯是亮还是灭,将状态“亮”量化为1,而状态“灭”量化为0,从而实现本帧视频图像的二值化编码。通过图像分割等其他图像处理技术对目标框内的图像进行光斑检测操作,假如目标框中检测到光斑信号,则将所检测到光斑中心更新为当前帧的目标框中心;假如目标框中未能检测到光斑信号,则适当扩大目标框的范围(目标框中心位置可以任务保持不变,主要增大目标框的长和宽),在目标框范围内通过帧间图像跟踪和匹配算法对目标模型进行检测跟踪,将检测到的目标光斑信号中心更新为当前帧的目标框中心,依次循环处理下一帧,得到一长串二进制编码,通过船载PC 机预置的字符编码数据库对此二进制编码进行译码操作,得到直观的通信字符,并输出到计算机屏幕上提供给接收方。
整个灯光通信接收端软件流程如图4所示。
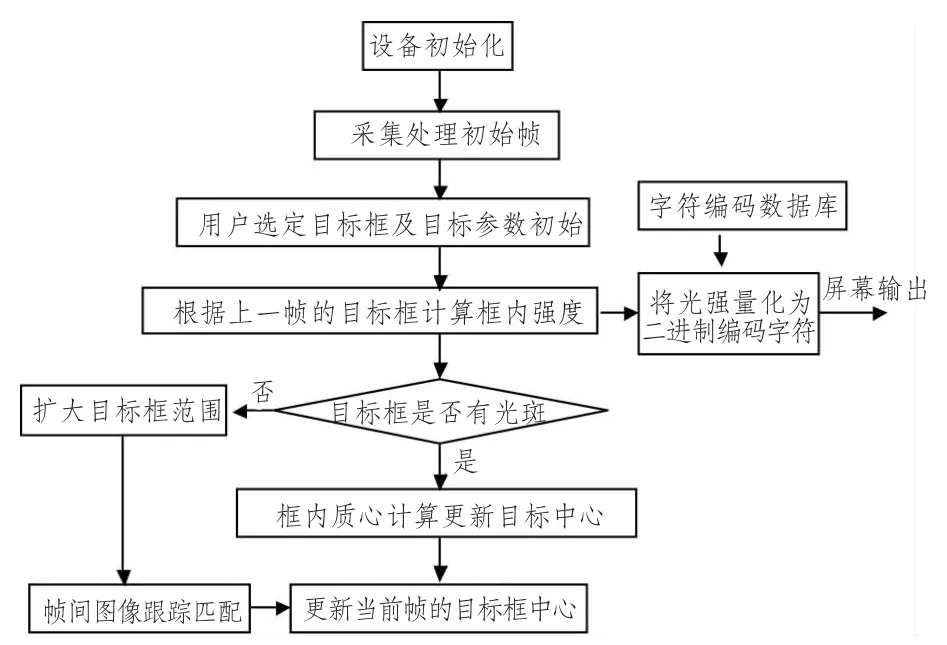
图4 接收端软件流程图Fig.4 The software process of ship light receiver
3 试验测试
灯光通信系统试制完成后,在相互距离分别为3,5 n mile 处进行了白天和夜晚的通信实验。每单元试验共进行1 000 组报文收发,同时记录实验数据,并对其进行对比和分析,如表1 与表2所示。

表1 陆地固定试验场地试验Tab.1 The experiment on fixed field

表2 海上移动试验场地试验Tab.2 The experiment on sea field
表1 试验是在陆地固定试验场进行,分别于白天相隔3 n mile 处及夜晚相隔5 n mile 处进行了试验,试验结果表明,在能见度比较良好的天气条件下,误码率比较低;当能见度不良甚至肉眼都无法识别的情况下,误码率就比较高。表2 的试验场地放置于移动海上2 艘船之间进行,由于舰船的摇摆会造成接受灯光的强度和方向的变化,误码率相对于固定场地来说比较高一些。通过以上试验可以看出,在能见度大于3 n mile 以上时,本通信系统能够进行有效的灯光通信。
4 结 语
本灯光通信系统分别在白天(雨天、晴天)、夜晚、能见度不好等天气条件下都进行实验,LED通信信号灯可根据天气状况进行亮度的调节,自动接收系统采用图像分割、电子稳像等方法能够快速有效地识别灯光信号,识别精度高,运行安全可靠,操作方便,可控性较好,人机界面灵活丰富。
[1]张晓敏.船舶灯光通信训练模拟器的研制[J].集美大学学报,1996,1(2):53-58.
ZHANG Xiao-min.Study on the simulator of ship light communication[J].The Editorial Board of Jimei University(Natural Science),1996,1(2):53-58.
[2]郭飒.基于OPENGL 的灯光控制系统的实现[J].微计算机信息,2004,20(3):30-31.
GUO Sa.Realization of a light controling system based on OPENGL[J].Control & Automation,2004,20(3):30-31.
[3]刘新元,赵宇,马永涛.嵌入式DRM+接收机的设计与实现[J].电子测量技术,2012,35(9):70-73.
LIU Xin-yuan,ZHAO Yu,MA Yong-tao.Design and implementation of the embedded DRM+receiver[J].Electronic Measurement Technology,2012,35(9):70-73.
[4]祝晓东,郁松年.利用非高速摄像机测量转速的方法研究[J].计算机测量与控制,2012,20(1):52-56.
ZHU Xiao-dong,YU Song-nian.Researching of the method of measuring angle velocity based on non-high video camera[J].Computer Measurement & Control,2012,20(1):52-56.
[5]王呖,冯驰.基于块匹配的电子图像稳定算法[J].成阳师范学院学报,2006,21(4):36-38.
WANG Yang,FENG Chi.Algorithm of electronic image stability based on block matching[J].Journal of Chengyang Normal University,2006,21(4):36-38.
[6]黄金权,王程,王润生.基于投影特征的快速图像稳定算法[J].计算机工程与科学,2006,28(1):82-85.
HUANG Jin-quan,WANG Cheng,WANG Run-sheng.A fast image stabilizing algorithm based on projected features[J].Computer Engineering and Science,2006,28(1):82-85.
