基于联合型模糊PID的非线性空气悬架建模与控制*
2014-12-02詹长书孙世磊
詹长书 孙世磊
(东北林业大学交通学院 哈尔滨 150040)
0 引 言
悬架系统是汽车的重要组成部分之一,对于汽车的行驶平顺性能起着至关重要的作用.在车辆负载相同时,空气弹簧比普通弹簧的振动频率更低[1],能够有效地提高车辆的行驶平顺性.
空气悬架系统(ASS)是一个典型的非线性系统,然而近年来仍有许多研究者将其简化为线性弹簧进行研究.文中建立了与气囊压力、有效面积等因素有关的非线性弹簧模型,基于空气弹簧的非线性特性建立了单轮1/4车辆动力学模型.在ASS 控制算法上,单纯的模糊控制主观性较强[1-2];神经网络控制需要大量的数据进行训练[3];单纯的PID 控制对非线性的复杂的系统无法达到理想的效果[4];文献[5]虽然已将模糊PID控制应用到空气悬架上,但是未将其非线性刚度特性考虑在内.
模糊控制具有适应能力强且灵活的特点,PID 控制具有结构简单调整方便的特点.文中针对空气悬架的非线性特性,综合考虑模糊与PID控制的特点设计了联合型模糊PID 控制器对空气悬架进行仿真研究.
1 空气悬架模型的建立
1.1 膜式空气弹簧模型
空气弹簧的绝对弹力可以近似表示为:

式中:p为空气弹簧内有效压力;A为空气弹簧内有效截面积.
p通常与气囊内初始压力、气囊容积等因素有关.在任意状态下,空气弹簧内有效压力可表示为

式中:p0,pa分别为气囊内初始压力,大气压力;V,V0为气囊内容积、初始容积.
工程上,将气囊的容积和有效面积简化成随气囊垂向变形线性变化的量[6]

式中:A0为空气弹簧内初始有效截面积;α,β分别为气囊内有效容积变化率,有效面积变化率;x为空气弹簧高度变化量.
由式(1)~(4)可得空气弹簧力为

1.2 单轮1/4车辆模型
空气弹簧悬架系统是一个非线性的复杂系统,很难建立精确的模型.故可根据需要和实际情况进行适当简化.文中采用某商用车的空气弹簧悬架为研究对象,将空气悬架系统简化为空气弹簧和减震器[7].对于没有附加气室的空气弹簧,可将减震器的阻尼系数视为定常值.其简化模型,见图1.

图1 1/4空气悬架模型
根据牛顿定律,可得空气悬架系统的力学方程
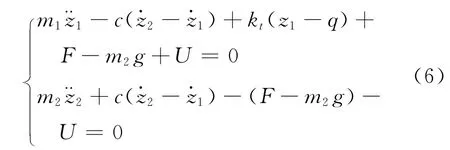
式中:m1,m2分别为车辆轮胎质量、车身质量;c为悬架阻尼系数;kt为轮胎刚度系数;z1,z2,q分别为车轮垂向位移、车身垂向位移、路面输入位移;U为弹簧气压变化引起的弹簧弹力变化量.悬架的具体主要参数值见表1.
2 道路友好性的评价指标
道路友好性可以描述为车辆对路面破坏能力的大小,破坏能力越大,友好性越差.其评价指标主要有轮胎动载荷系数(DLC)、动态载荷应力因子(DLSF)和95百分位4次幂和力.
轮胎动载荷系数(DLC)可以定义为

式中:CDLC为轮胎动载荷系数;σ为车轮动载荷标准偏差;G为车轮静载荷.
动态载荷应力因子(DLSF)Hedrick在DLC的基础上提出的[8],可以定义为

式中:CDLSF为动态载荷应力因子.
3 联合控制器的设计
针对空气悬架,分别设计了PID 控制器、模糊控制器、联合型模糊PID 控制算法对其进行控制.半主动空气悬架是利用簧载质量的速度信号作为反馈信号调节悬架的刚度(或减振器阻尼),从而提高车辆的乘坐舒适性与平顺性.PID 控制器对复杂系统的控制效果欠佳.模糊控制器适用于精确模型较难建立的非线性复杂系统正好弥补了PID 控制器的不足.联合型控制器见图2.
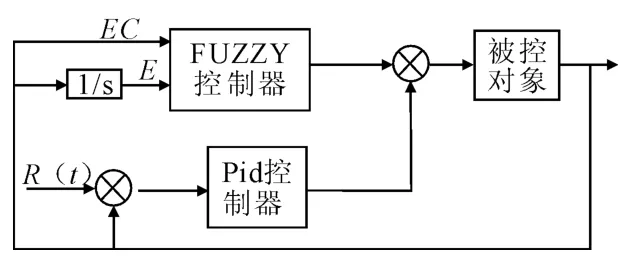
图2 联合型模糊PID 控制器原理框图
3.1 PID 控制器
PID 控制器是将实际输出信号与设定信号之间的偏差作为控制器的输入量,并以实时偏差(比例环节)、偏差的过去(积分环节)和偏差的将来(微分)三者间的线性组合而成的控制器.PID 控制的表达式为

式中:k为采样序号;Kp,Ki,Kd分别为比例、积分、微分系数.
PID 参数的确定有2 种理论设计与实验确定.理论设计需要建立精确地数学模型,对于多刚体的汽车悬架动力学很难做到[9].文中采用普通的位置式PID 控制算法,经参数整定,得比例系数Kp=3000,积分系数Ki=3000,微分系数Kd=3000,联合型控制器的积分系数Ki=3000.
3.2 模糊控制器
模糊控制适用于精确数学模型较难建立的系统,是根据经验设计模糊规则进行推理的控制算法.模糊控制器的设计主要包括输入输出变量的定义、隶属函数的选择、模糊规则表的建立及解模糊化.文献[10-12]中以车身加速度为控制目标,选取车辆垂向速度(E)、车身垂向加速度(EC)作为输入信号.控制器输出为气囊压力改变产生的力U.根据所选取的路面激励和车辆速度,选取输入输出的物理论域分别为[-1,1],[-20,20],[-3375,3375],相应的模糊论域分别为[-3,3],[-3,3],[-4.5,4.5].量化因子和比例因子分别为3,3/20,750.输入输出区间内的隶属函数均为三角形隶属函数,区间边界处分别选取Z型与S型隶属函数.
输入输出模糊变量的模糊子集划分为{负大,负中,负小,零,正小,正中,正大}={NB,NM,NS,O,PS,PM,PB}.模糊规则的设计原则是尽量降低车身垂向加速度.模糊规则表见表2.表中UF为模糊控制器的输出.

表2 模糊规则表
3.3 联合型模糊PID控制器模型
将PID控制器与Fuzzy模糊控制器并联得到联合型模糊PID 控制器模型,见图3.PID 控制器的输入为车身垂向加速度与期望值的偏差,二维模糊控制器输入分别为车身垂向速度和垂向加速度.控制器的输出为气囊压力变化所产生的力.
控制器总的输出为

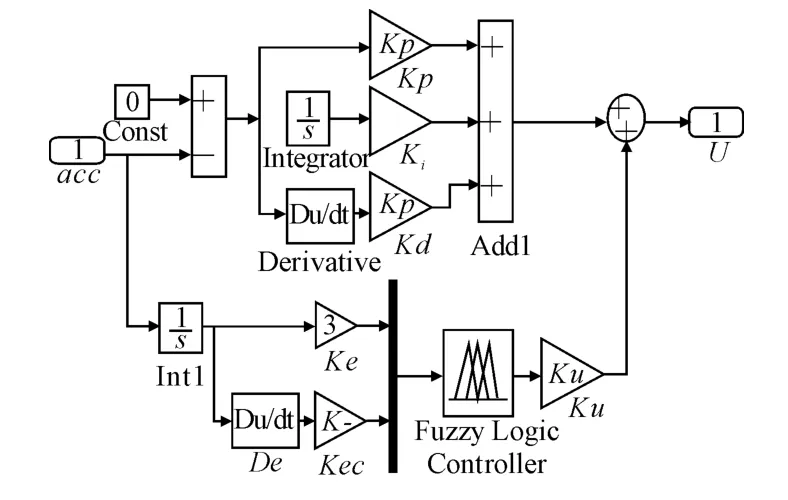
图3 模糊PID 联合型控制器仿真模型
4 仿真及结果分析
4.1 平顺性分析
进行仿真时,路面激励采用滤波白噪声的方法[6],选取B级路面δ=0.1303m-1,汽车行驶速度v=60 km/h,将路面白噪声(band-limited white noise)的功率调整为0.01.为保证结果的稳定性选取仿真时间30s.分别得到PID 控制、模糊控制和联合控制3种空气悬架的平顺性指标有效值,见表3.

表3 平顺性能对比
经典的PID 控制能够有效的改善被动空气悬架的车身加速度和轮胎动载荷,但对于悬架动行程性能的改善程度不大.模糊控制对被动空气悬架的车身加速度和轮胎动载荷也有一定的改善,但对悬架动行程没有改善,其效果次于PID控制.采用联合型控制在车身加速度和悬架动行程的控制效果优于PID 控制,在轮胎动载荷的控制上降低了2.51个百分点,整体性能最优.
在仿真时间为30s的基础上,为了清楚的表现出联合控制与被动控制控制悬架平顺性性能的差异,绘制了[0,4]时间区间内悬架垂向加速度,轮胎动载荷,悬架动行程曲线,见图4~6.曲线表明:联合型控制空气悬架在整体上有益于提高悬架的性能,在局部对悬架的性能有一定的破坏作用.
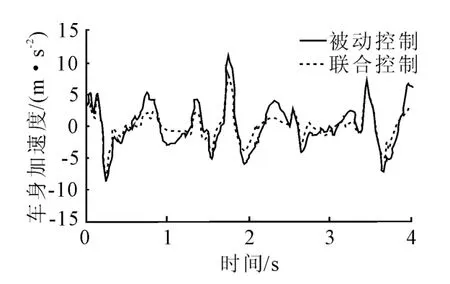
图4 悬架垂直加速度仿真曲线
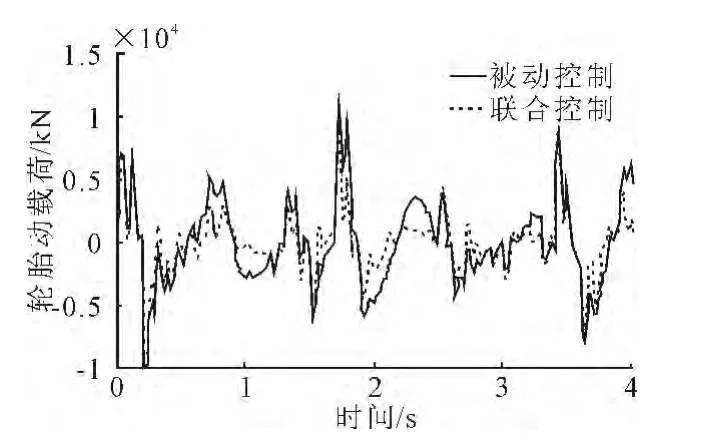
图5 悬架轮胎动载荷仿真曲线

图6 悬架动行程仿真曲线
4.2 道路友好性分析
在B级路面激励条件下,计算得到3种不同车速下DLC和DLSF的均方根值,见表4.

表4 道路友好性能对比
随着车速的增加,DLC 和DLSF 逐渐减小.在3种车速下,采用联合型模糊PID 控制空气悬架的DLC 的改善率分别为23.54%,22.91%,21.22%,DLSF 的改善率分别为41.64%,39.27%,35.38%.同时,本文拟合得到车速与DLSF的变化关系,见图7.随着车速的增加,联合控制型空气悬架的DLSF 减少的较快,被动空气悬架DLSF缓慢减少.在一定的车速变化范围内,联合控制空气悬架的DLSF 显著减小,道路友好性明显改善.

图7 车速-DLSF特性图
5 结 论
1)经典的PID 控制能够有效的改善被动空气悬架的车身加速度和轮胎动载荷,但对于悬架动行程性能的改善程度不大.模糊控制对被动空气悬架的车身加速度和轮胎动载荷也有一定的改善,但对悬架动行程没有改善,其效果次于PID控制.采用联合型模糊PID 控制在车身加速度和悬架动行程的控制效果优于PID 控制,整体性能最优.
2)联合型模糊PID 控制的空气悬架对道路的破坏程度明显降低,道路友好性能更优.
[1]赵丽梅.半主动空气悬架模糊控制的仿真研究[J].汽车科技,2010(3):58-60.
[2]刘晓辉.半主动空气悬架系统的模糊控制[J].科技情报开发与经济,2011(21):167-169.
[3]王 辉,朱思洪.半主动空气悬架神经网络的自适应控制[J].农业机械学报,2006(1):28-31.
[4]李仲兴,李 美,张文娜.车辆空气悬架PID 控制系统的研究[J].拖拉机与农用运输车,2009(36):56-58.
[5]陈蓉蓉,陈 龙,聂佳梅,等.汽车空气悬架联合型模糊PID 控 制[J].机械设计与制造,2011(11):165-167.
[6]XIE Zhengchao,WONG P K,ZHAO Jing,et al.A noise-insensitive semi-active air suspension for heavyduty vehicles with an integrated fuzzy-wheelbase preview control[J].Mathematical Problems in Engineering,2013(5):155-159.
[7]CHEN Yikai,HE Jie,KING M.Comparison of two suspension control strategies for multi-axle heavy truck[J].Journal of Central South University,2013(20):550-562.
[8]HEDRICK J K,YI K.The effect of alternative heavy truck suspension flexible pavement response [R].Berke ley:University of California,1991.
[9]喻清舟,刘静静,蔡 挺,等.基于PID 控制的电控空气悬架系统设计[J].湖北汽车工业学院学报,2008(4):75-78.
[10]肖启瑞,樊明明,黄学翾.车辆工程仿真与分析—基于MATLAB的实现[M].北京:机械工业出版社,2012.
[11]王靖岳,王浩天,张 勇.基于模糊PID 控制的汽车主动悬架研究[J].机械科学与技术,2009,28(8):1047-1051.
[12]徐 宁,詹长书.基于ADAMS和MATLAB的空气悬架系统仿真与试验研究[J].汽车技术,2013(1):42-44.
