基于ARM Cortex-M3的舰用无线振动检测系统*
2014-12-02
(海军大连舰艇学院 大连 116018)
1 引言
舰体的振动对舰艇的结构影响较大,严重时可以造成结构的损坏,还能使舰上仪表、设备破损或失灵,破坏舰艇的稳定性,影响舰上人员的工作效率以及生活的舒适性[1]。所以在舰艇试航时进行舰体以及舰上设备的振动检测是一项很重要的工作。因此需要设计研发了一套振动检测系统,可以对舰艇和舰上设备进行振动检测。同时由于舰艇环境的特殊性,这就需要多点检测和无线传输,并且也要求各个节点能工作更长时间,所以需要设计出低功耗系统。本文介绍一种运用低功耗高性能微处理器(MCU)作为核心,采用三轴数字加速度计作为测量元件的无线检测系统。这种无线振动检测系统具有安装方便、体积小携带便利、精度高、速度快的特点。
2 组成与设计原理
基于ARM Cortex-M3的舰用无线振动系统组成如图1所示,其中MCU 采用基于ARM Cortex-M3内 核[2~3]的32 位单片机STM32F103C8T6[4]。由于在舰上检测过程中,需要在多个点检测采集数据,所以整个系统由多个检测节点、一个汇聚节点和上位机组成,其中检测节点最多可以有123个。检测节点由MCU 模块、三轴加速度模块、无线模块组成。其中由MCU 模块中的单片机接受传感器数据并控制无线模块发送数据。汇聚节点则是由MCU模块接受无线模块传输的检测节点数据,然后通过USB接口将数据上传到上位机。

图1 无线振动检测系统框架结构
具体工作流程如下:初始化后,检测所有存在的检测节点的完好性并反馈信息,然后进入数据采集阶段。各个检测节点的传感器模块检测到的所在位置的三轴加速度数值,MCU 模块通过I2C 数字接口采集数值,并通过SPI总线控制无线模块发送数据。汇聚节点接收各个检测节点的数据并由MCU 通过USB传输数据给上位机,上位机显示数值并保存数据,也可以打印结果。
3 硬件设计
3.1 MCU 模块
系统所采用的STM32F103C8T6[4]是属于STM32F103 系列微控制器中的一种,是基于ARM Cortex-M3[2]的32位增强型微控制器,可用于高度集成和低功耗的嵌入式应用,开发较为简单快捷,可以使用广泛应用的MDK 开发环境进行开发[5]。这一系列的MCU 可以工作在72MHz的主频上,运算速度达1.25DMips/MHz(Dhrystone 2.1),具有零等待周期的存储器,可以运行单周期乘法和硬件除法。外设包括有64K 的Flash程序存储器和20K 的SRAM。在这次使用48 引脚产品上具有37个多功能双向5V 兼容的I/O 口。有16个外部中断,可以任意映射到任何一个I/O 口。总共有7个定时器,其中3个16位普通定时器,每个定时器有多达4 个用于输入捕获\输出比较\PWM 或脉冲计数的通道,1个16位6通道高级控制定时器,具有多达6路的PWM 输出能做到死区控制、边缘\中间对齐波形和紧急制动。2 个看门狗定时器和1个24位自减型系统时间定时器。有9个通信通道,包括2个I2C接口,3个USART 接口,支持ISO7816、LIN、IrDA 接口和调制解调控制,2个SPI同步串行接口(18mb/s),1个CAN 接口,1个USB2.0接口。使用2.0~3.6V 供电和I/O 管脚。内嵌晶体振荡器和RC 振荡器,使用PLL供应CPU 时钟,具有带校准功能的32kHz RTC振荡器。有两个12位数模转换器,1μs转换时间,具有双采样和保持功能。可以采用睡眠、停机和待机模式等节能模式,可以使用Vbat为RTC和后备寄存器供电。调试模式为串行线调试和JTAG 接口[6]。
3.2 无线模块
nRF24L01[7]是一款单片无线收发器芯片,工作在2.4GHz~2.5GHz通用ISM 频段。无线收发器包括:nRF24L01 由频率发生器、增强型SchockBurst模式控制器、功率放大器、晶体振荡器、调制器、解调器等功能模块组成,不需要外加滤波器也可以得到良好的通信效果。最高工作速率2MBps,高效GFSK 调制,抗干扰能力强,特别适合工业控制场合。具有126个频道,满足多点通信和调频通信需要,内置硬件CRC 检错和点对多点通信地址控制。nRF24L01 使用SPI接口可以和任何MCU 进行通信,其中地址、输出功率、频道选择和协议都可以通过SPI接口进行设置,可以接受5V 电平输入。芯片封装面积小,使用20脚QFN 4×4mm 封装。具有极低的电流消耗:当工作在发射模式下,发射功率为-6dBm 时电流消耗为9.0mA,接收模式时为12.3mA,掉电模式和待机模式下电流消耗更低。芯片可以软件设置空闲模式、关机模式,易于节能设计。适合工业数据采集、无线报警及安全系统等诸多领域应用。无线模块的电路图如图2所示。
3.3 传感器模块
采用低功耗的高分辨率三轴数字加速度计ADXL345[8],这一款加速度计分辨率高达13 位,测量范围为±16g。具有超低功耗:Vs=2.5V 时,测量模式下低至23μA,待机模式下为0.1μA 功耗随带宽自动按比例变化用户可选的分辨率,包括10位固定分辨率、全分辨率,分辨率随g范围提高而提高,±16g时高达13位(在所有g范围内保持4mg/LSB的比例系数)嵌入式存储器管理系统采用FIFO 技术,可将主机处理器负荷降至最低。能够进行单振/双振检测、活动/非活动监控、自由落体检测。电源电压范围:2.0V~3.6V。I/O 电压范围:1.7V~VS。灵活的中断模式,可映射到任一中断引脚。通过串行命令可选测量范围,通过串行命令可选带宽。宽温度范围(-40℃~+85℃)。抗冲击能力达到10000g采用3×5×1mm 的LGA封装。数字输出数据为16位二进制补码格式,可通过SPI(3线或4线)或I2C 数字接口访问,在本 系统中采用了I2C数字接口进行数据访问。

图2 无线模块电路图
3.4 总体硬件设计
系统包括最多123个检测节点和1个汇聚节点组成。检测节点电路包括传感器模块电路、MCU 及外围电路和无线射频模块,如图3所示。其中传感器模块由于采用的是三轴数字加速度传感器,所以直接输出数字信号,通过I2C 数字接口传输给MCU,而MCU 则通过SPI数据总线控制无线模块发送测量得到的数据。各个节点上还带有按键电路用来修正和更改检测节点的无线射频地址和三轴加速度传感器的量程[9]。

图3 测量节点组成
汇聚节点电路由无线射频模块电路和MCU及外围电路以及USB接口电路组成,如图4所示。由于STM32F103 单片机没有片上USB 控制器,所以需要一个USB接口芯片。
这里选用了PDISUSBD12[10]芯片,并使用自定义USB HID[11]设备的形式与上位PC 进行通信,这种方式的优点是不需要开发专门的驱动,连接方便。采集节点的MCU 通过USB 接收上位机的指令,并用SPI总线控制无线射频电路收发信息,再通过USB把收到的数据传给上位机。
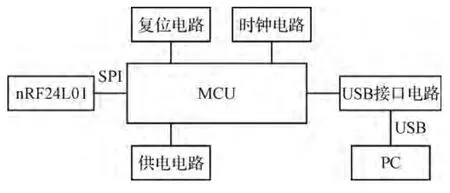
图4 汇聚节点组成
4 软件设计
4.1 检测节点软件设计
检测节点通过传感器模块测量节点所在位置的瞬时加速度,通过无线模块把测量数值传输给汇聚模块。由于整个系统有多个检测节点,而汇聚节点在同一时间只能接收一个检测节点的数据,所以检测节点必须相隔一定时间,把数据打包发射,数据在发射前存储在MCU 的SRAM 内,由于单个检测节点一次发射的数据量不是很大,采用依次通信的方式,软件设置一个循环为18ms。各个检测节点有不同的无线射频发射地址ID,当需要更改地址的时候可以通过按键进行修改。
4.2 汇聚节点软件设计
汇聚节点在接收到上位机发出的采集信息的指令后,给系统中存在的各个检测节点地址依次发送指令,得到回复信息后把接收到的各个检测节点的数据上传给上位机显示。如果某个地址没有回复,就上传这个地址为空的信息。采集节点与上位机连接是用USB接口,并且是作为上位机的USD_HID 设备。通过USB把数据传输给上位机。
4.3 上位机软件设计
上位机软件用来控制采集节点发送指令并显示和存贮汇聚节点接收和上传的各个检测节点的数据,如图5所示,上部表格显示系统中存在的检测节点的数量和实时状态,下部显示波形图。可以选择显示XYZ各轴的波形,或者三者同时显示。并且数据也可以保存为文件存储在上位机硬盘上。

图5 上位机程序的GUI界面
5 结语
本系统充分利用具有Cortex-M3内核的32位微控制器STM32F103的高效性和低功耗,采用低功耗的nRF24L01 无线数传芯片和ADXL345 三轴加速度传感器芯片,可以满足多点大面积振动检测的工作需求,同时也保证了低功耗的运行,使系统在使用的时候能有较长的工作时间。如果是需要在更大振动加速度的场合,可以更换较大量程的三轴加速度传感器。在实际测试中,测试节点与采集节点的最远无线传输距离可以达到200m,同时安装与使用方便,具有低功耗、实时性强、扩展容易、成本低廉的特点,非常适合在舰船上使用,具有广泛的应用推广前景。
[1]姚振亮,张阿漫.船体振动与噪声[M].北京:国防工业出版社,2010,8:51-72.
[2]ARM 公司Cortex-M3技术参考手册[EB/OL].2009:1-10.
[3]ARM 公司Cortex-M3用户指导用书[EB/OL].2009:1-6.
[4]意法半导体公司STM32F103 增强型系列数据手册[EB/OL].2009:1-4.
[5]李宁.基于MDK 的STM32 处理器开发应用[M].北京:北京航空航天大学出版社,2008:43-45.
[6]彭刚,秦志强.基于ARM Cortex-M3的STM32系列嵌入式微控制器应用实践[M].北京:电子工业出版社,2011:32-37.
[7]诺迪克半导体公司.单芯片发送接收nRF24L01产品技术规格说明[EB/OL].2006:2-7.
[8]逻辑设备公司.3轴数字加速度计ADXL345数据手册[EB/OL].2009:1-7.
[9]乔立升,吴积钦,徐可佳.无线组网技术在接触网振动试验系统中的应用[J].现代电子技术,2009,30(1):33-35.
[10]飞利浦PDIUSBD12数据手册[EB/OL].2001:1-5.
[11]马伟.计算机USB系统原理及其主/从机设计[M].北京:北京航空航天大学出版社,2004:20-25.