反鱼雷鱼雷自导导引弹道方法研究*
2014-12-02王志杰曹小娟
范 路 吕 瑞 王志杰 曹小娟
(1.中国船舶重工集团公司第705研究所 西安 710075)(2.水下信息与控制重点实验室 西安 710075)
1 引言
随着新技术在鱼雷中的应用越来越迅速,鱼雷性能不断提高,对舰艇造成的威胁也越来越大,当今,鱼雷已成为众矢之的,反鱼雷成为海战中的一项重要任务。世界各个国家在提高探测设备的同时,开始研发一系列对抗鱼雷的武器,例如反鱼雷鱼雷、反鱼雷水雷、反鱼雷深弹、反鱼雷浮标等“硬杀伤”武器,以及诱饵、假目标等“软杀伤”手段。然而现代鱼雷在航程、航速、杀伤力、智能化程度等方面已比以往提高很多,普遍具备了多种搜索模式和机动打击方式,从而使传统的用诱饵欺骗鱼雷的对抗方法日显力不从心。另一方面,海军中鱼雷日益成为航母、两栖舰船、补给船等高价值目标在近海活动的主要威胁。硬杀伤是软杀伤对抗鱼雷攻击的有效补充,需要有很高的可靠性,并可随着鱼雷的发展而不断改进。反鱼雷鱼雷是硬杀伤手段中的最新技术,它装载于舰艇和潜艇上。作为一种主动防御武器,能够对快速运动的小目标进行捕获、并具有较好的机动性、可在较大距离上,利用其战斗部的水下爆炸拦截毁伤来袭鱼雷,能够有效防御来袭鱼雷攻击。
由于反鱼雷鱼雷攻击的目标是来袭鱼雷,因此和普通鱼雷相比,其目标具有机动性和快速性较大,态势变化快,作战反应时间短等特点。反鱼雷鱼雷与鱼雷对抗时,通常需要处于迎击状态,与普通鱼雷相比,反鱼雷鱼雷对导引方式要求更高,设计难度更大,故根据反鱼雷鱼雷的基本要求提出新的导引方法,以达到更好的导引效果。并进行了仿真计算,初步验证新导引方法的性能。
2 相对运动方程
鱼雷与目标的相对运动关系如图1所示。图中t为鱼雷的位置,m为目标的位置;tm是视线,也称瞄准线;r为鱼雷与目标之间的距离;q表示视线与攻击平面内某一基准线x0的夹角,称为舷角,从基准线逆时针转向视线为正;vt和vm分别是鱼雷和目标的速度;ηt和ηm分别是鱼雷和目标速度向量与视线的夹角,为提前角,从速度向量逆时针转向视线为正;ψt和ψm分别是鱼雷和目标的弹道偏角,将鱼雷和目标视为质点时,它们也为鱼雷和目标的航向角。
鱼雷速度和目标速度在视线上的投影分别为vtcos(q-ψt)和vmcos(q-ψm),得到相对距离的变化率为

图1 相对运动关系

舷角的变化率取决于鱼雷和目标速度在垂直于视线方向的投影vtsin(q-ψt)和vmsin(q-ψm),于是可得:

根据q=ηm+ψm=ηt+ψt,亦可得到

3 基于比例导引法的修正
ATT 是一种特殊用途的自导鱼雷,自导导引弹道是指自导系统发现目标后,根据所获得的目标信息,解算选择的自导导引规律,操纵ATT 攻击并命中来袭鱼雷。对该段弹道的要求是在机动性、稳定性允许的范围内ATT 具有高的命中目标概率。故以下对比例接近法进行修正分析,以使其达到更好的拦截效果。
3.1 比例导引法
在比例接近导引法中,鱼雷弹道切线的旋转角速度与视线的旋转角速度成正比,其约束方程为[1]

列出相对运动方程如下:

其制导指令为

若要实现比例导引法必须测出视线角速度。使用q=η+ψ,由航向陀螺测出鱼雷的偏航角ψ,自导多波束近似测出目标方位角η,可间接得到视线角。主动自导时取主动发射周期T为和得采样周期,求出每个周期和的变化,可近似表示为=(Δψt+Δηt)/T,则可近似实现比例导引法。而事实上,由于声自导误差较大,比例导引法在导引初期实现较为困难[2]。
3.2 修正的比例导引法
由比例导引法的制导指令式(3)可看出,比例导引法属于角速率控制率,在反鱼雷鱼雷上有较大的误差,故对比例导引法进行修正。
将式(3)左右两端乘以采样间隔Δt,可得:

即可得到制导指令为

经过修正可得到按照视线角增量进行控制的导引律。从前述分析中得知,这样使得反鱼雷鱼雷弹道较为稳定,易于操舵,同时也可以降低导引误差,可基本满足反鱼雷鱼雷的导引要求。
4 基于方位角预测的导引方法
此种导引方法是基于反鱼雷鱼雷偏航角预测的一种方法。通过对连续两帧数据测得的偏航角差量,乘以放大系数,以达到预测来袭鱼雷弹道的目的,并如图2所示。
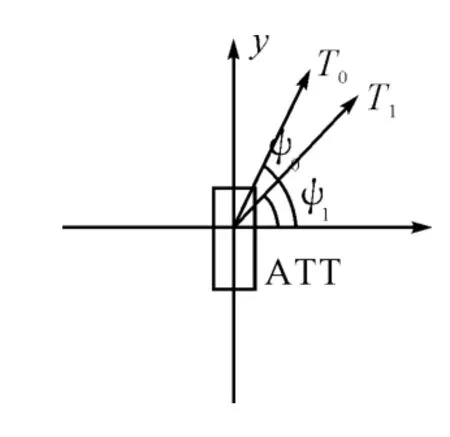
图2 预测弹道
其制导指令为

此导引方法需要通过航向陀螺测量出鱼雷的偏航角,并通过放大的相邻两帧偏航角差来对当前偏航角进行修正,后对反鱼雷鱼雷发出制导指令。由于此导引方法在测得相邻两帧的偏航角后对来袭鱼雷弹道进行了提前预测,估测出来袭鱼雷的未来弹道方向,故在低数据率情况下也不会造成较大的脱靶量,从而对自导要求降低。
5 仿真分析
5.1 修正后的比例导引法下的仿真
设雷目初始距离为2000m,速度50kn,反鱼雷鱼雷拦截速度为50kn,按照修正的比例导引法进行仿真分析。
仿真结果如图3~图5所示。
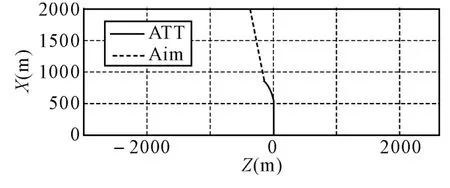
图3 弹道轨迹示意图

图4 偏航角变化图

图5 脱靶量示意图
通过仿真图形可以看出此种导引方法在导引开始,反鱼雷鱼雷面向来袭鱼雷做直航,在探测到来袭鱼雷的方位后根据制导指令做机动弹道。通过仿真结果可以看出此种导引方法脱靶量约为15m,可在有效的脱靶量距离内可拦截来袭鱼雷。
由于传统的比例导引法在实际应用中,因丢帧而造成反鱼雷鱼雷无法及时调整航向而丢失目标从而脱靶,故对其进行修正以应用到反鱼雷鱼雷弹道中。而仿真结果表明其可在有效的脱靶量内成功拦截来袭鱼雷。
5.2 基于方位角预测的导引方法
设雷目初始距离为2000m,速度50kn,反鱼雷鱼雷拦截速度为50kn,按照方位角预测的导引方法进行仿真分析。
仿真结果如图6~图8所示。

图6 弹道轨迹示意图

图7 偏航角变化图

图8 脱靶量示意图
6 结语
从导引弹道设计来讲,理想的自导导引弹道除要求无脱靶量外,还应该是:弹道的曲率半径大,可以对鱼雷的机动性要求小;导引时间短,可以减小鱼雷的航程消耗,命中角大,对自导需求低。本文在对比例导引法研究的基础上进行修正以适应反鱼雷鱼雷导引弹道的需求。同时结合实际情况提出新的基于偏航角的预测算法,同时对此导引方法进行分析,并作出了数学仿真实验,为反鱼雷鱼雷今后的弹道设计、计算、工程研制提供了一定的理论依据。
[1]张宇文.鱼雷弹道与弹道设计[M].西安:西北工业大学出版社,1999,9.
[2]严卫生.鱼雷航行力学[M].西安:西北工业大学出版社,2005,7.
[3]尹韶平,刘瑞生.鱼雷总体技术[M].北京:国防工业出版社,2011,10.
[4]丁振东.反鱼雷鱼雷作战模式及拦截弹道初步研究[J].鱼雷技术,2004,12(1):13-15.
[5]姜凯峰,周明,林宗祥.舰载反鱼雷鱼雷作战效率仿真研究[J].计算机仿真,2011,28(6):9-17.
[6]孟庆玉,张静远,宋保维.鱼雷作战效能分析[M].北京:国防工业出版社,2003.
[7]陈春玉,张静远,王明洲.反鱼雷技术[M].北京:国防工业出版社,2006,4.
[8]由大德,徐德民.反鱼雷鱼雷拦截概率影响因素仿真分析[J].鱼雷技术,2010,18(4):312-315.
[9]钱东,张起.欧洲反鱼雷鱼雷研发展望[J].鱼雷技术,2006,14(5):1-5.
[10]刘晓欧,尹韶平,高山.反鱼雷鱼雷毁伤效果计算分析[J].鱼雷技术,2008,16(3):1-5.