分时段实时观测脉冲星的单探测器导航方法
2014-12-02杨博张睿孙晖
杨 博 张 睿 孙 晖
(北京航空航天大学 宇航学院,北京100191)
徐 帆
(北京航天自动控制研究所,北京100854)
脉冲星由于具有较高的频率稳定度,能够为近地轨道、深空和星际空间飞行航天器提供位置、速度、时间和姿态等导航信息,实现航天器全程高精度自主导航和运行管理,具有广阔的应用前景[1-3].
然而,现有的导航算法大多利用同时固定观测3~4颗脉冲星来导航定位[4-6],这样的导航方法有如下几个缺点:①要求航天器搭载多个X射线探测器,增加航天器有效载荷负担和功耗;②固定观测需不断调整探测器角度以跟踪所选脉冲星,对航天器姿态精度要求很高;③航天器飞行过程中,会受探测器探测范围、天气遮挡等因素影响,一些时段无法跟踪所选脉冲星,导致导航无法进行.
针对上述X脉冲星导航方法现存的不足,本文开展了分时段实时对X射线脉冲星可见性分析捕获的单探测器导航方法研究.该方法主要有以下3个步骤:
1)根据航天器当前状态,结合动力学模型,预估航天器下一时刻的位置速度信息;
2)根据预估的位置信息,并结合探测器可探测范围,分析该时刻在可探测范围内可见脉冲星的个数,实时生成该时刻的导航星库;
3)在生成的导航星库中随机选取一颗脉冲星,用于维持该时段的导航.在下一时刻,重复以上过程进行导航脉冲星捕获,并选取一颗与上次所选星不同的脉冲星用于导航.
1 X射线脉冲星导航系统
1.1 状态方程
以航天器的位置和速度作为状态变量,其状态方程如下所示[7]:

其中,X(t)是状态变量;f(X,t)是状态动力学的非线性函数;ω(t)是噪声项.
考虑地球非球形引力摄动J2项,动力学方程如下式:

其中,(x,y,z)是航天器的位置矢量;(vx,vy,vz)是航天器相对于地球质心的速度;Re为地球半径.方程(2)的解可直接用四阶Runge-Kutta法数值计算得到.
1.2 测量方程
在J2000.0地心赤道惯性坐标系,将航天器测得时间与地球质心的时间延迟量作为测量方程,有

2 分时段实时建立脉冲星库
在应用X射线脉冲星导航时,脉冲星的可见性是影响导航能否进行的关键因素.航天器在一个轨道周期内,随着方位的变化,受到探测器有效探测范围的影响,可见的脉冲星也会随之变化,无法做到对脉冲星全时段可见.因此,本文提出在航天器飞行的每个时段,根据其即时位置信息,同时考虑单探测器的遮挡因素,建立该时段可探测到的脉冲星的导航星库,以保证该时段的导航.
2.1 脉冲星分布
脉冲星是一种高速旋转的中子星,当星体自转且辐射束扫过探测设备时,就能获得一个脉冲信号.X射线脉冲星距离地球遥远,其发出的脉冲信号在全太阳系里可见,且观测方向不随航天器位置变化而变化.
目前,已探测到的X射线源大约为759个,其中有中子星95颗.本文在此基础上,综合考虑X射线脉冲星的物理特性、空间位置、TOA测量精度等因素,优选出32颗脉冲星用于导航仿真.32颗脉冲星如表1所示,其在第二赤道坐标系下的位置分布如图1所示.
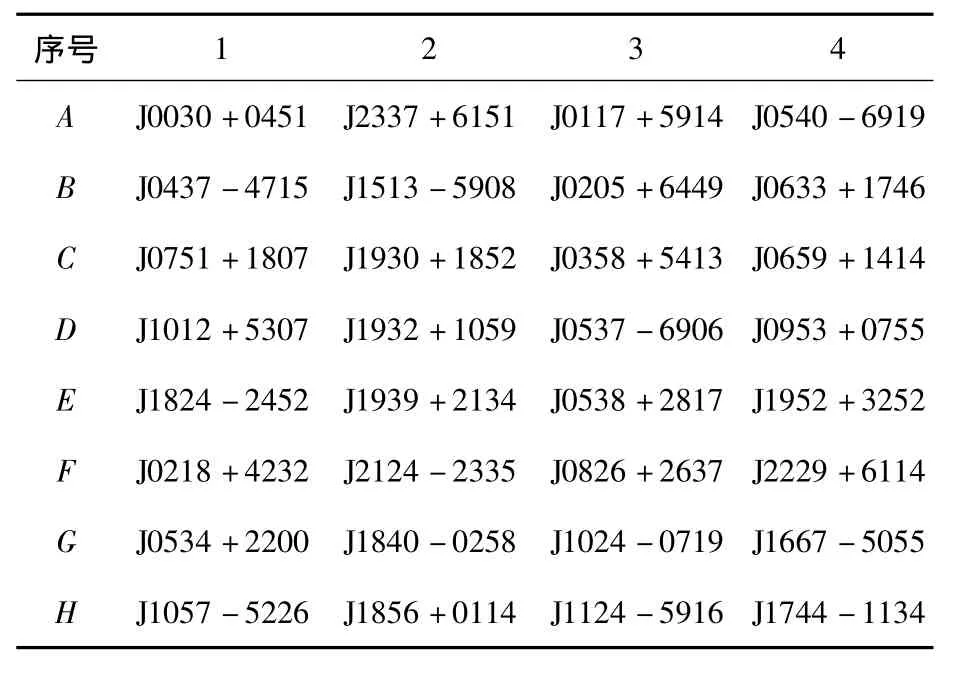
表1 选用脉冲星名称Table 1 Names of the optional pulsars

图1 脉冲星分布Fig.1 Pulsar distribution
2.2 单探测器脉冲星可见性分析
对于环地轨道航天器来讲,脉冲星可见性主要受两方面因素影响:①脉冲星是否受地球等天体遮挡[8];②脉冲星是否在航天器搭载的探测器可探测范围之内,即探测器可以有效接收并处理X射线光子的角度范围.
1)地球对脉冲星的遮挡.
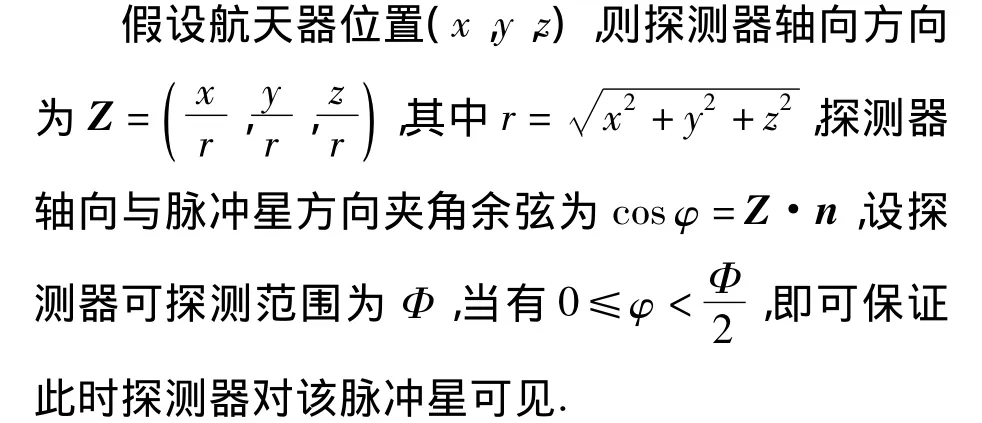
以地心指向航天器方向为Z轴,假设探测器安装在航天器的Z面,且保持背离地心方向不变.由几何关系可以得到脉冲星受地球遮挡的遮挡角:

其中h为航天器轨道高度.以地球同步轨道为例,可解得θ=17.4°,由于探测器光轴指向背离地心向外,故只要探测器的可探测范围不大于360°-θ,即可使可探测范围内的脉冲星不受到地球遮挡.
2)探测器可探测范围影响.
将探测器可以有效接收并处理脉冲星光子信号的范围定义为探测器的可探测范围[9-10].由于脉冲信号在太阳系内均作为平行光处理,故将脉冲星方向n与探测器光轴指向Z之间的夹角和探测器可探测范围一半的大小进行比较,即可确定脉冲星是否在探测器可见范围内.
分别考虑可探测范围为60°,120°的情况,计算探测器可见的脉冲星个数如图2和图3所示.
可以看到,在航天器一个轨道周期内,当取探测器探测范围为60°时,可见脉冲星个数最多为6颗,最少为0颗,即不可见;当取可探测范围为120°时,可见脉冲星最少为2颗,最多为12颗.
改变探测器有效探测范围的大小,研究各个可探测角度下,在一个轨道周期内,有可见星的时间占总时间的百分比,可以得到图4所示结果.

图2 探测范围60°时可见性分析Fig.2 Visibility analysis when the detectable range is 60°

图3 探测范围120°时可见性分析Fig.3 Visibility analysis when the detectable range is 120°
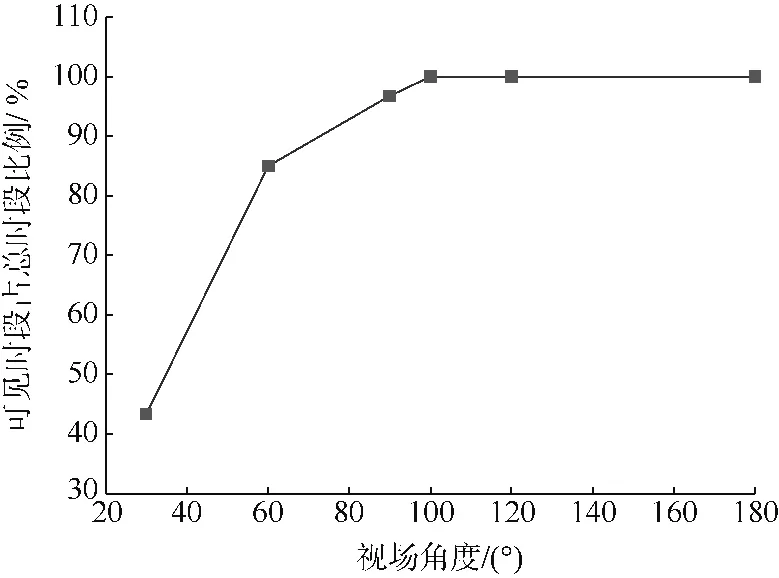
图4 各可探测角度下有可见星的时间百分比Fig.4 Time percent of existing visible pulsar at different detectable ranges
由图4可以看出,当探测器角度大于等于100°时,在一个轨道周期内有可见星的时间百分比为100%,即航天器在轨道的任意位置,均最少有一颗脉冲星可以被探测到,从而可以实现全时段导航.
2.3 实时建立脉冲导航星库
在航天器每个飞行时段,通过上面的可见性分析,筛选该时段可见脉冲星并提取其物理参数,实时建立该时段可用脉冲导航星库.如图3所示,以探测器视角120°,第160个采样点为例,可以看到此时可见脉冲星个数为6颗,该6颗脉冲导航星数据如表2所示,即当航天器飞行至该时段时,可由这6颗脉冲星实时组成该时段脉冲导航星库.

表2 该时刻可见的脉冲星Table 2 Visible pulsars at this period of time
在每个时段实时建立的脉冲导航星库中,随机选取一颗脉冲星,作为该时段导航用星.采取随机选取导航星的方法可以尽量避免连续多时段选取同一颗星用于导航,获得不同方向的观测数据,更有利于导航精度的提高.如果连续两次选取的脉冲星是同一颗,则需进行一次换星,在第2个时段导航星库中选取一颗与第1次所选脉冲星空间夹角最大的星进行导航.其理论依据如下证明[11-13].
假设航天器连续两个时段k和k+1时段分别对不同的脉冲星进行观测,由式(3)可以得到


可见,对于连续量测观测不同的脉冲星,两颗星的夹角直接决定V的秩,夹角越小,则系统的可观测性越差.
若对系统进行连续3次不同脉冲星的观测,根据前面所述方法可以计算得出,此时系统可观性矩阵V为
可以看出,系统可观测矩阵的秩为6,系统完全可观[14-15].
3 仿真分析
3.1 仿真条件
仿真中选用J2000.0地心赤道惯性坐标系,以地球同步卫星轨道为例验证本文导航方法.
1)轨道信息:卫星标称轨道数据由STK软件产生.轨道半长轴为 42 164 km,偏心率为0.0002,轨道倾角0°,近地点辐角0°,升交点赤经193°;
2)初始误差:三轴位置初始位置误差为1 km,速度误差2 m/s,钟差假设为0 s;
3)探测器参数:取探测器面积为1 m2,探测器可探测范围为120°,信号处理时间500 s;
4)测量误差:脉冲星方向测量误差取0 rad,脉冲信号到达时间测量误差为1 μs;
5)仿真时间:取探测器对脉冲信号的积分时间为500 s,故滤波周期为500 s,分时段观测周期为500 s,总仿真时间6 d.
3.2 仿真结果
仿真结果如图5和图6所示.

图5 位置误差Fig.5 Position error

图6 速度误差Fig.6 Speed error
图5、图6分别为基于UKF的单探测器分时段实时观测脉冲星获得的导航结果.由图可见,滤波收敛快速而平稳,且导航精度可以达到337 m,速度误差为0.16 m/s.
对比采用全程固定观测1颗脉冲星的导航方法,若滤波参数与本文方法相同,其仿真结果如图7所示.

图7 固定观测1颗星位置误差Fig.7 Position error of the fixed observation of a single pulsar
由图7可以看出,该种观星方法位置误差很大(2.95 km),且有发散的趋势.出现这种结果是因为:三维空间中的定位需要确定3个正交方向上的坐标.固定只观测1颗脉冲星,定位误差只能在一个方向上得到修正,其他2个方向上的定位误差始终得不到修正而逐渐发散,导致导航系统定位误差发散.因此,固定观测脉冲星的导航方法需要同时观测3颗脉冲星才可能保证滤波收敛.
分时段观星方法在连续几个时段内观测不同方向的脉冲星可以分别对3个方向上的定位误差进行修正,这样长期定位,误差在3个方向上均可得到相应修正,从整体上限制了滤波发散.
表3给出本文提出的分时段观测脉冲星单探测器导航方法、固定观测脉冲星单探测器导航方法和传统观测3颗脉冲星导航方法的性能比较结果.

表3 3种导航方法性能比较Table 3 Comparison of three navigation methods
由表3可以看出,应用本文的选星换星导航方法,导航精度可以与传统固定观测3颗星方法的精度相媲美.在同样需求一个探测器的情况下,导航精度较单探测器固定观测有很大提高.且在选取每次导航用星前进行脉冲星的可见性分析,建立实时的导航星库,可以有效避免脉冲星导航空白段的出现.
4 结论
本文通过对脉冲星单探测器导航方法的深入研究,提出了分时段实时观测脉冲星保证单探测器高可靠性和高精度导航的思想.通过仿真获得以下结论:
1)本文所采用的导航方法与传统三星导航方法相比,精度略有下降,但完全满足导航需求;
2)采用实时建立脉冲星库的方法可以有效地防止单探测器导航中星体遮挡及视角限制问题,保证了导航脉冲星的可观测性;
3)本文提出的单星导航方法便于工程实现.
References)
[1] Sheikh S I,Pines D J,Ray P S,et al.Spacecraft navigation using X-ray pulsars[J].Journal of Guidance Control and Dynamics,2006,29(1):50-63
[2]帅平,李明,陈绍龙,等.X射线脉冲星导航系统原理与方法[M].北京:中国宇航出版社,2009 Shuai Ping,Li Ming,Chen Shaolong,et al.Principle and method of X-ray pulsars navigation system[M].Beijing:China Astronautic Publishing House,2009(in Chinese)
[3]胡小平.自主导航理论与应用[M].长沙:国防科技大学出版社,2002 Hu Xiaoping.The theory and application of autonomous navigation[M].Changsha:National University of Defense Technology Press,2002(in Chinese)
[4] Sheikh S I.The use of variable celestial X-ray sources for spacecraft navigation[D].Maryland:University of Maryland,2005:281-341
[5]宁晓琳,马辛,张学亮,等.基于ASUKF的火星探测器脉冲星自主导航方法[J].北京航空航天大学学报,2012,38(1):22-27 Ning Xiaolin,Ma Xin,Zhang Xueliang,et al.Autonomous pulsars navigation method based on ASUKF for Mars probe[J].Journal of Beijing University of Aeronautics and Astronautics,2012,38(1):22-27(in Chinese)
[6]杨成伟,邓新坪,郑建华,等.含钟差修正的脉冲星和太阳观测组合导航[J].北京航空航天大学学报,2012,38(11):1469-1473 Yang Chengwei,Deng Xinping,Zheng Jianhua,et al.Integrated navigation based on pulsars and sun observation including clock error correction[J].Journal of Beijing University of Aeronautics and Astronautics,2012,38(11):1469-1473(in Chinese)
[7]孙守明,郑伟,汤国建.X射线脉冲星/SINS组合导航研究[J].空间科学学报,2010,30(6):579-583 Sun Shouming,Zheng Wei,Tang Guojian.Research on X-ray pulsars/INS integrated navigation[J].China Journal of Space Science,2010,30(6):579-583(in Chinese)
[8]毛悦,宋小勇,冯来平.X射线脉冲星导航可见性分析[J].武汉大学学报,2009,34(2):222-225 Mao Yue,Song Xiaoyong,Feng Laiping.Visibility analysis of X-ray pulsar navigation[J].Journal of Wuhan University,2009,34(2):222-225(in Chinese)
[9] Sheikh S I,Park C,Pines D J,et al.Navigational system and method utilizing sources of pulsed celestial radiation:US,7197381[P].2007
[10]胡慧君,赵宝升,盛立志,等.用于脉冲星导航的 X射线光子计数探测器研究[J].物理学报,2012,61(1):019701-1-6 Hu Huijun,Zhao Baosheng,Sheng Lizhi.X-ray photon counting deteceor for X-ray pulsar-based navigation[J].Chinese Journal of Physics,2012,61(1):019701-1-6(in Chinese)
[11]王奕迪,唐歌实,郑伟.基于单探测器的X射线脉冲星深空导航算法[J].力学学报,2012,44(5):912-918 Wang Yidi,Tang Geshi,Zheng Wei.Algorithm for X-ray pulsarbased navigation using a single detector in the deep space exploration[J].Chinese Journal of Theoretical and Applied Mechanics,2012,44(5):912-918(in Chinese)
[12]郑广楼,刘建业,乔黎,等.单脉冲星自主导航系统可观测性分析[J].应用科学学报,2008,26(5):506-510 Zheng Guanglou,Liu Jianye,Qiao Li,et al.Observability analysis of satellite autonomous navigation system using single pulsar[J].Journal of Applied Sciences-Electornics and Information Engineering,2008,26(5):506-510(in Chinese)
[13]刘劲.基于X射线脉冲星的航天器自主导航方法研究[D].武汉:华中科技大学,2011 Liu Jin.X-ray pulsar-based spacecraft autonomous navigation[D].Wuhan:Huazhong University of Science and Technology,2011(in Chinese)
[14] Xiong K,Wei C L,Liu L D.The use of X-ray pulsars for aiding navigationof satellites in constellations[J].Acta Astronautica,2009,64(4):427-436
[15]满红,梁迎春,冀勇钢,等.自动控制原理[M].北京:清华大学出版社,2011 Man Hong,Liang Yingchun,Ji Yonggang,et al.Principle of automatic control[M].Beijing:Tsinghua University Press,2011(in Chinese)