温室采摘车的机电液一体化设计
2014-12-02顾金梅
王 鸿,顾金梅,李 飞,李 杨
嘉兴学院机电工程学院,浙江嘉兴 314100
当今时代是个科技高速发展的时代,各种新的技术和新的理论不断出现。在农业领域,现代温室种植模式得到广泛的重视,对传统的农业生产模式带来了较大冲击,给农业机械开发和研究提出了许多新的挑战,随着新的农业机械的不断出现又促进了农业生产的发展。
随着中国人口越来越多,民以食为天,不仅吃饱,吃的更好,随着人们生活水平的不断提高,人们更注重合理膳食,而水果在人们的日常生活中扮演着越来越重要的角色,因为它不仅富含丰富的营养而且有助于消化,同时还有降血压,减缓衰老,减肥瘦身,皮肤保养,明目抗癌等功效。水果的需求量越来越大,然而采摘水果却成了困扰果农们的难题,需大量人力物力。为了解决摘果难题、高效采果,同时不损伤果皮,降低劳动成本,促成水果大众化,我们设计了将广泛应用在温室农业作物收获的温室采摘机械。
1 温室采摘车的基本机构的组成
1.1 温室采摘车的设计理念
根据总体设计中的设计方案,并且组织样机生产加工、标准件、电气元件以及其他设备的选型,设计出一种小型移动式可自动连续升降的温室农作物果实采摘车,该采摘车设计的主要要求如下。
1)要具备可靠性好、精度高的检测系统,以便于准确地识别和定位成熟的果实。
2)要具备柔性和灵巧性都比较好的机械手及末端执行器,能够在作业过程中躲避障碍物,这就要求机械手具有一定的冗余度。由于采摘对象为树上的小果子,果实质地柔软易损伤,要求设计末端执行器时,能快速准确地切除果实,并确保不损坏果实[1]。
3)由于作业对象分布的随机性,要求采摘机器人在运动过程中能够不断探测和判断目标,并根据要求采摘果实,这个过程中的数据处理量相当大,要求采摘机器人必须具备实时性高的控制系统,通常采用开放式结构的控制系统。
4)研究采摘机器人的主要目的之一是代替人工作业,提高采摘效率;同时,还要注意保证采摘的成功率,尽量避免采摘到不成熟的果实。
5)在机构设计过程中,要进行机构的运动学和动力学分析,应用优化设计的方法来设计机器人的机构,而且机构必须紧凑,以便于能够更灵活地作业[2]。
6)由于采摘机器人的操作者是农民,操作过程必须简单,而且要尽可能地降低成本,以确保更好地推广。
1.2 采摘车的基本组成
根据采摘车的功能、设计参数和采摘车应实行的运动要求,采摘车需要具备相应功能的实现结构,其主要组成:原动部分、传动部分、工作部分、液压系统和控制系统.通过各个部分的互相协调,保证采摘车的正常运行和其功能的实现。使其能在一定范围内保持良好的稳定性,并能精确的随着需要上下前后移动。
2 温室采摘车各部件的设计及筛选
2.1 原动部分和传动部分设计
由于温室采摘车主要工作于温室大棚内,自身有一定的重量,且设计任务要求温室采摘车有一定的行驶速度,选择电动机为原动机来驱动温室采摘车在地面上的行驶。在电动机的选取方面,对两种电动机的选取进行了比较,其中电子式的无极调速器比机械式的精度更高,普遍适用于日常的电瓶车等较广范围,而机械式的调速器操作不够灵活,在一定程度上影响了实际的功能,故选用电子式无极调速器[3]。另外,对于传动部分的设计,由于工作空间大小已经限定,要求采摘车整体紧凑,使用方便可靠,成本低廉,且可用在低速重载有冲击振动的工作条件下,因此,行走传动机构选用链传动。采用履带结构,使采摘车在各种情况下的大棚内部如履平地,可以平稳的行走。
2.2 工作部分设计
采摘车工作部分分为底盘、行走系统、举升系统、工作平台.其中底盘和工作平台结构较简单,下面主要介绍举升系统和行走系统的设计内容。
1)举升系统。
考虑到本课题温室栽培中的多种因素:抬升高度不是很高、承载重量不是很大,并且造价要求相对较低,拟采用剪叉液压升降台,通常,液压剪叉式升降平台主要用于载人高空作业和低高度提升重物[4]。现将其用在温室采摘中简单可靠,而且升降自如,可合理利用空间,方便使用。在选择系统前,通过比较气动控制和液压控制,其中,气动控制的精度较低,会随着气压差的变化而过高或过低的升降,相对而言,液压的精度较高,承受压力较大。故选用液压控制让其更加灵活,更精确的采摘果实。其工作原理如图1、2 所示。
2)行走系统。
温室采摘车行走系统的设计主要考虑采摘车能够平稳地进行前进后退动作,由于操作的工人基本上都是农民,所以造作需要简单方便,成本低。基于上述问题我采用了后轮驱动,前轮从动的行驶系统,就像普通的农业收割机,真正方便农民的实际操作。另外,将前轮装在轮盘上径向转动,使其能够自动改变方向。类似于挖掘机的行走方式和其履带结构,所设计的采摘车能够较为方便的适应各种地形。

图1 单侧剪叉结构简化示意图
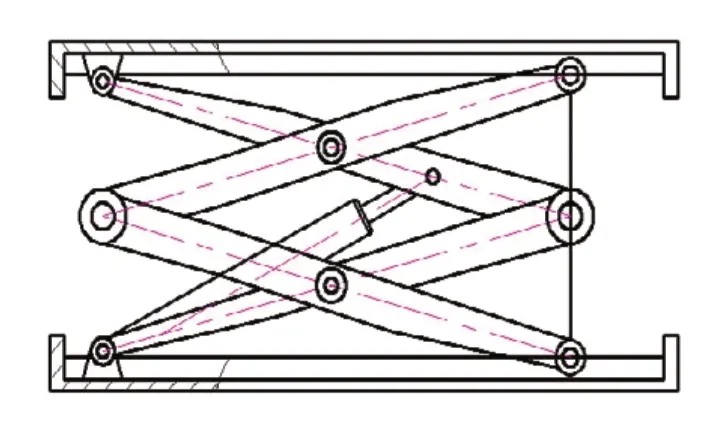
图2 举升系统结构设计图
3 液压系统
采摘车工作台的升降采用液压传动,由于液压包和液压缸各具独立的结构,可以根据需要组合成各种不同的甚至是分离式的结构方式。与同规格常规液压站相比,液压动力包具有结构紧凑,体积小,重量轻,操作简单,维护保养方便的特点,现已广泛用于我国的工程机械、汽车、农机、机床等各个行业[5]。由此,我们选择液压动力包作为温室采摘车的驱动装置,液压缸为执行元件。
液压动力包是一种微型液压动力源。其体积小、结构紧凑,适用于采摘车这类小型设备采摘车液压升降过程为:当举升平台时.电动机带动油泵泵油,经单向阀进入油缸,油缸推动平台上升;当平台下降时,电磁阀通电、换向,缸中的油经过电磁阀、节流阀流回油箱,平台落下;举升工作平台时,由油缸中的活塞杆伸出,推动又架臂运动,将工作平台举升至所需高度位置;下降时可借助自身重力作用降到规定位置.液压缸是将电机、泵、阀、缸、油箱紧凑地连接在一起的整套液压装置,将其布置在剪叉式结构的下剪叉臂之间,使升降平台的行程可达到液压缸行程的8~9 倍,减小了液压缸的长度与直径,最大限度地减小了液压缸的体积,便于在较狭小的空间内布置液压缸。另外,由于液压缸已经布置在举升系统的剪叉结构上,因此液压包和液压缸采取的是分离式的结构方式。
4 控制部分
控制部分主要借鉴于遥控玩具汽车的遥控装置,控制采摘车的前进后退左右移动以及升降平台的升降移动。无线遥控距离可达200m,并且采摘车纵向正反向行驶可在0m/min~30m/min 的速度范围内无级调速,保持一定的精确性。
遥控系统的控制主要分为两部分,一部分为行走系统的控制,另一部分为举升系统的控制。出于方便方面考虑,将两部分的系统分开控制,当其行走系统工作时,同样可以操控其举升系统,方便行走时通过一些障碍物,另外也可以单独操作其中一个系统,方便其准确采摘。在设计电路时,通过继电器和熔断器对其电动机进行保护,防止电动机的烧坏,保护电路的安全。
5 结论
基于目前的状况,国内对机械化农业并未给与相当的重视,或者说基本国情的限制,很难大规模机械化,通过研究设计高效、廉价、操作灵活,性能可靠,结构简便的机器,同时免除高空摘果的危险性,有良好的市场前景和应用价值。
设计的温室采摘车结合了机械设计,电气,液压,自动控制理论等多门学科的知识,能够实现其自由的前后左右运动、升降等动作,基本上达到了预期的设计目标。其中,该设计的主要研究成果有:1)利用蓄电池供电,液压系统提供动力,机械构造采摘车的主体,有效的将机电液统一起来,使其功能更加完善;2)该设计巧妙的采用了连杆机构使得液压升降台能够稳定的完成升降动作;3)在设计中运用了生活中的遥控玩具汽车的遥控装置,让采摘车的控制方便快捷了很多;4)充分体现了结构简单,活动灵活,操作方便的特点。
最后,将其经过完善并通过生产制造成产品投入市场,将会具有很高的实用价值。
[1]崔玉洁,张祖立,白晓虎.采摘机器人的研究进展与现状分折[J].农机化研究,2007(2).
[2]张铁中,徐丽明,汤惨映.果蔬采摘机器人研究进展与展望[J].农业机械学报,2006(5).
[3]徐丽明.果蔬果实收获机器人的研究现状及关键问题和对策[J].农业工程学报,2004,20(5):38-142.
[4]刘安琦.温室采摘车的机电液一体化设计[D].北京工业大学,2009.
[5]高自成,李立君,刘浩.油茶果采摘机物料收集装置的选型研究与设计[J].中南林业科技大学学报,2011,31(10).
