模糊自整定PID 双闭环直流调速系统建模及仿真分析
2014-11-28陈德海CHENDehai潘兴宾PANXingbin
陈德海CHEN De-hai;潘兴宾PAN Xing-bin
(①东北石油大学,大庆 163311;②国网冠县供电公司,冠县 252500)
(①Northeast Petroleum University,Daqing 163311,China;②State Grid Guanxian Power Supply Company,Guanxian 252500,China)
0 引言
直流调速控制因其具有良好的起动、制动性能,在现代化生产中起着重要作用,在轧钢机、矿井卷扬机、高层电梯等需要高性能可控电力拖动的领域中得到了广泛的应用[1]。
文章通过对转速电流双闭环系统的仿真,验证在电网电压波动发生之时,电流反馈能否得到限制,其最终目的是使电机转速不发生变化。在这种目的下,设计出双闭环直流调速系统。最后通过在双闭环调速系统中的模糊控制仿真实验,来验证在电机运行参数突变时,模糊控制器是否具有卓越的控制性能。
1 直流电动机的模糊自整定PID 控制器建模及仿真分析
一般常用模糊控制器结构框图如图1 所示[1]。

图1 常用模糊控制器结构框图
用Simulink 进行仿真,模型如图2 所示。
模糊自整定控制器采用封装结构,结构图如图3 所示。
PID 控制器内部仿真结构如图4 所示。
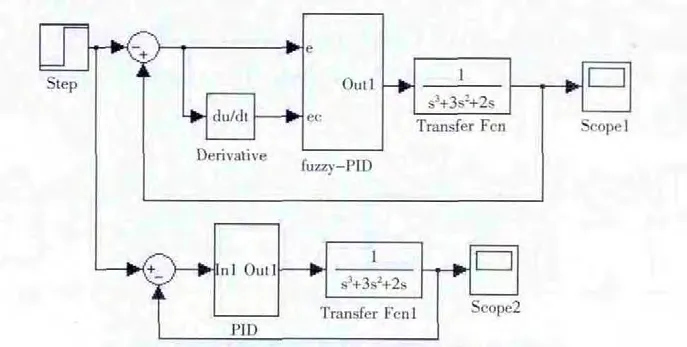
图2 PID 参数自整定模糊控制器仿真结构

图3 模糊自整定控制器内部仿真结构
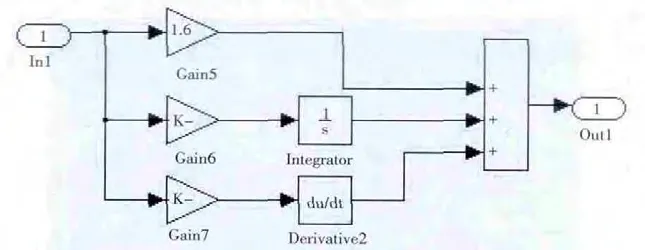
图4 PID 控制器内部仿真结构
PID 控制器与模糊自整定PID 控制器仿真结果如图5所示。
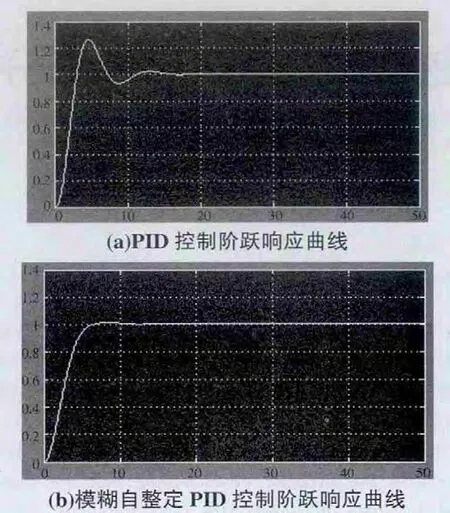
由两种PID 控制阶跃响应曲线可知,模糊自整定PID控制器系统响应迅速,系统超调量小,具有良好的动态、静态性能。并有一定的抗干扰能力及参数时变的适应能力。
2 基于模糊PID 的直流调速系统的建模与仿真
现采用晶闸管直流电动机单闭环直流调速系统,设整流装置放大系数K=44,三相平均失控时间TS=0.00167s,测速反馈系数Kf=0.01178v/rpm,比例积分调节器的比例系数、积分时间常数分别为Kp=0.049,T2=0.088s,仿真模型如图6。

图6 单闭环直流调速系统仿真模型
控制器分别采用纯比例控制器和比例积分控制器(Kp=0.08,Ki=13)时,系统单位阶跃响应曲线如图7。
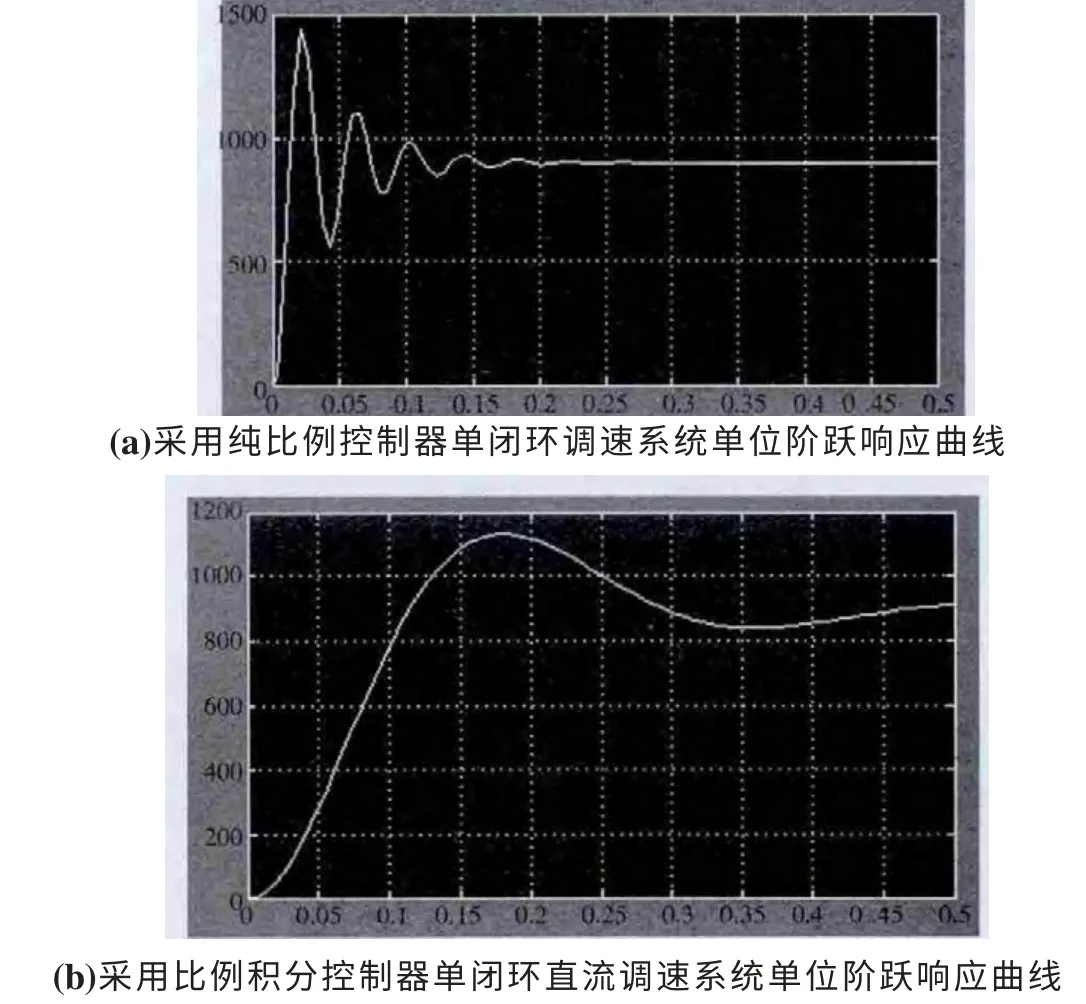
图7
通过对比发现,采用比例控制器的系统的阶跃响应曲线呈衰减振荡式,稳态后系统存在稳态误差,超调量较大。采用比例积分控制器的系统阶跃响应曲线略有超调,系统平稳。因而积分控制器能够降低系统振荡幅度,消除稳态误差,比例控制器有增加系统快速响应的作用。
采用双闭环直流调速系统的PID 控制器模型如图8所示,电动机各项参数如之前所述,系统测速反馈系数Kt=0.067v/rpm,系统电流反馈系数Ki=0.072V/A,触发整流装置的放大系数KS=30,三相平均失控时间TS=0.00167s,电流环滤波时间常数Toi=0.002s,转速环滤波时间常数Ton=0.01s。
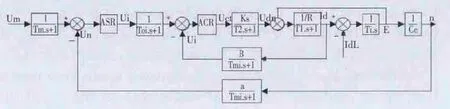
图8 直流双闭环调速系统动态结构图
由仿真得到系统的阶跃响应曲线如图9 所示。

通过仿真实验,可以观察到系统响应曲线略有超调,曲线上升加快,峰值间隔时间较短,电流下降迅速,并保持稳定,且在0.04s 内系统响应结束,响应曲线比较理想。当ks=20 时,系统阶跃响应曲线如图9(b)所示,曲线单调递增,超调极小,最终在0.04s 时响应结束,达到预期效果。对于绝大多数机器设备,控制系统的抗扰动性能指标是致关重要的,给晶闸管装置和电动机分别加入扰动信号后,仿真结果如图10 所示。
由系统仿真曲线可知,晶闸管装置外加干扰信号后,电流在迅速下降后很快恢复预定值,最大动态落差:detac=-0.73,最大动态落差时间:Tp=0.024s。电动机外加一个干扰信号最大动态落差:detac=-27.2,最大动态落差时间:Tp=0.022s。
系统中转速环加入不同的干扰信号后的阶跃响应曲线如图11 所示。由图发现,转速阶跃响应曲线上升较快,上升时间大约为7.6s。
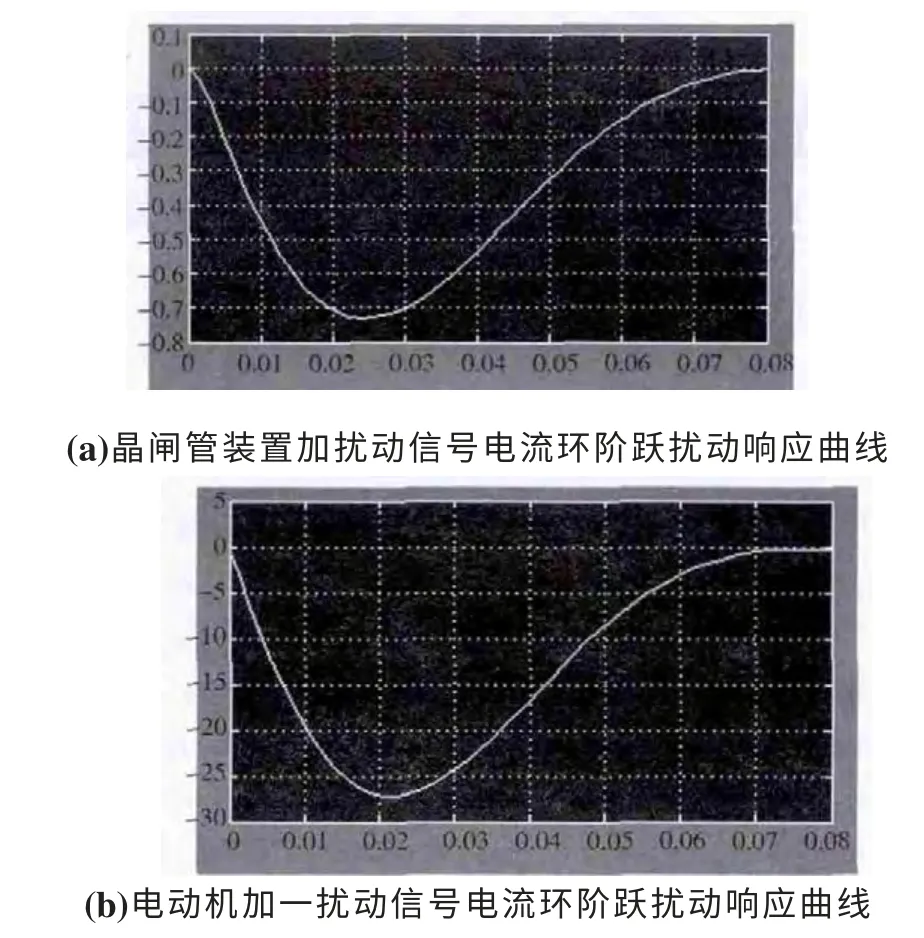
图10

图11
3 基于模糊控制的直流双闭环直流调速系统建模与仿真
一般模糊控制系统通常采用二维模糊控制结构[2],控制器内部结构如图12。
模糊控制器采用误差E、误差变化率EC 作为输入变量,其控制原理相似于PD控制器,它能确保系统的简易性、快速性,且能获得更好的动态性能。
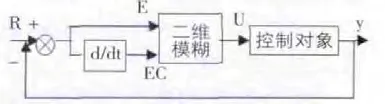
图12 模糊控制器结构
模糊控制器控制原理框图,如图13,其控制过程为:采集被测参数的测量值,并将该值与给定值作比较,得出误差e。误差与变化率ec 作为模糊控制器的输入变量[3]。将e、ec通过模糊化后得到模糊量E 和EC。再通过E、EC 和模糊控制规律,根据推理规则得到的模糊控制量△U,经模糊决策后,得到精确的控制量△U,为简化数学过程,设输入输出的变量值相等,相对应的隶属度函数表如表1 所示。

图13 模糊控制原理框图

表1 变量值的隶属度函数
速度的给定值n=[0,1000],模糊控制器的输入、输出阈值分别取e=[-150,150],ec=[-30,30],Ke=0.03,Kec=0.17,ku=20。根据隶属度函数表与直流电动机双闭环调速系统的控制经验,得到模糊控制规则表,如表2 所示。

表2 模糊控制规则表
根据直流电动机双闭环调速系统的内部结构,考虑到转速环是决定控制系统优劣的根本因素,内环电流环主要起改变电动机运行特性,以利于外环控制。转速环采用模糊控制器,控制仿真模型如图14 所示。

图14 转速环的模糊控制器模型
创建子系统并封装为模糊控制器FUZZY,内环仍采用PI 控制器,仿真模型如图15 所示。
由隶属度函数表及模糊控制规则表来编写模糊控制器的程序,先运行模糊控制器的运行程序,再运行主程序,得到曲线如图16(a)所示。
与传统PID 控制的双闭环直流调速系统相比,上升时间缩短为4s。如图16(b)。
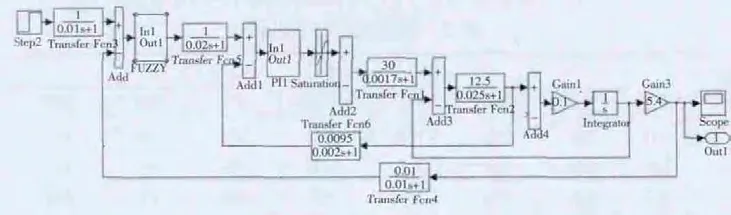
图15 双环直流调速系统的模糊仿真控制模型

图16
在系统模型中外加一个电压的干扰阶跃信号,系统仿真模型如图17 所示,得到系统响应曲线,如图18 所示。
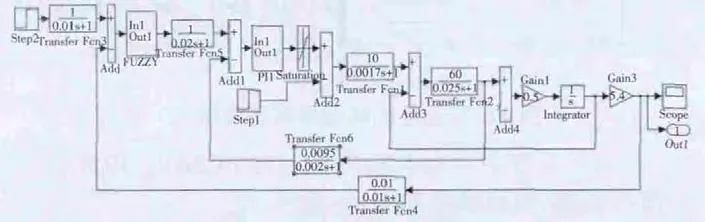
图17 抗扰动仿真模型
与PID 控制转速扰动仿真曲线图18(b)相比较可见:模糊控制器无稳态误差,超调量较小。当电机参数突变时,模糊控制器能起到很好的控制性能,传统PID 控制器尽管能起到一定作用,但在电机参数突变时,波动较大。
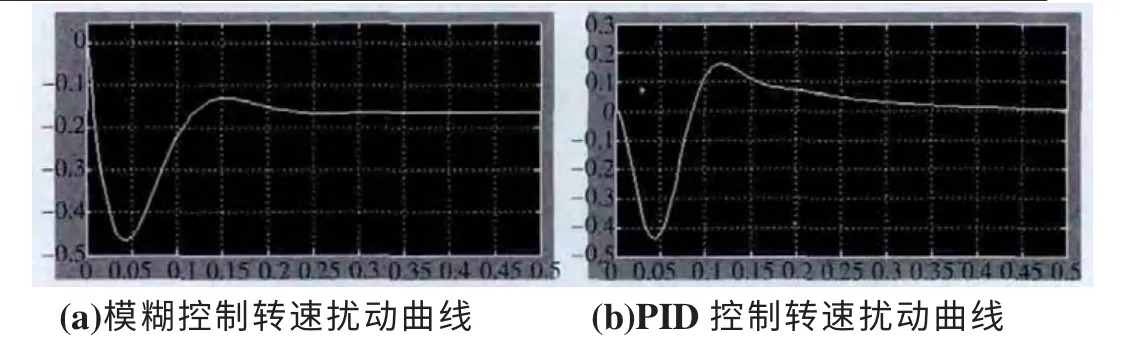
图18
4 结论
根据直流双闭环调速系统的电流环、转速环的动态特性、抗干扰特性,simulink 仿真结果表明模糊PID 控制的系统微小超调,无静差,能够很好地克服负载波动,电网电压干扰等影响,具有较好的动、静态性能。通过对比模糊控制器与传统PID 控制器,可以总结出模糊控制器可以大大提高控制效果,具有抗干扰性能强,系统响应迅速,动态性能好等特点。
[1]高海燕等.基于PID 参数整定的模糊控制器[J].自动化与仪器表,2001.
[2]张敏,余纯.基于MATLAB 的PID 参数模糊自整定控制器设计及仿真[J].自动化技术与应用,2005.
[3]张建仁等.基于MATLAB 的模糊控制系统的仿真[J].自动化与仪器仪表,2003.
[4]刘金琨.先进PID 控制MATLAB 仿真[M].电子工业出版社,2004:48-79.
[5]陈伯时.电力拖动自动控制系统[M].第三版.机械工业出版社,2008:30-94.
[6]汤兵勇.模糊控制理论与应用技术[M].清华大学出版社,2002:68-99.
