ISA 总线下的轴角编码器的设计
2014-11-28张安青
张安青
(国营第785 厂,山西 太原 030024)
轴角编码式模拟/数字转换器是一种复杂的电子装置或机电装置。模数(A/D)转换器就是将模拟输入量相对于模拟参考量,转换成数字量的输出[1]。
1 轴角编码器的功能
用于将火控雷达输出的现在点和未来点坐标角度值的模拟量(Bq φ)转换成对应的数据值,以便于数据处理器进行各种处理。设计包括:电阻分压网络、模拟转换开关、比例放大器、A/D 转换器、数据锁存器、控制电路等。如下图所示。
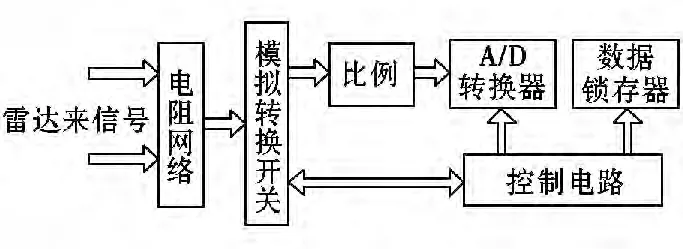
图1 轴角编码器功能框图
2 数字同步机转换
数字同步机转换由计算机输出的二进制数代表要转换的角度,送到数字同步机内,变为二个输出量,一个是角度的正弦,另一个是角度的余弦,二者都是调幅交流信号。数字步进机输出的正、余弦值送到分解器D 的定子绕组,而分解器D 的转子绕组输出交流误差电压。误差电压经过解调器,把交流误差信号变为直流误差信号,再经放大器后驱动电机M 转动,M 带动分解器转子旋转,直至误差信号为零,此时M 所带动的输出部件上的转角,就是所需要的模拟量[2]。
2.1 分解器的工作原理
分解器实质上就是正、余弦旋转变压器,从数字同步机来的正、余弦电压分别加到分解器的二个定子绕组,正、余弦电压在二互相垂直的定子绕组里产生电流,形成磁场,它们的合成磁场的方向形成交变的合成磁场切割转子线圈,在转子线圈内产生相应的误差电压,误差电压经解调放大后驱动电机M,M 带动分解器D 的转子转动,使转子线圈的方向与合成磁场的方向一致,这时线圈不再切割磁场,感应误差电压等于零。
2.2 数字同步机的工作原理
数字同步机的任务是把数字量转换为正、余弦电压量。数字量周期性地送入缓冲寄存器R 中,缓冲器内最高二位数字量作为正、余弦电压值的象限判别用以判定正、余弦电压是属于哪一个象限。除了最高二位之外,缓冲器的其它各位就代表在某一象限内角度的大小。把最高二位数字送入正、余弦象限判别器,把其余各位送入正余弦选通器内,正余弦选通器周期性地输出正弦量和余弦量到数模网络,数模网络输出正余弦的电压值到分解器,模拟开关分别由象限判别器控制。以控制输出电压的极性。
◆象限判别器
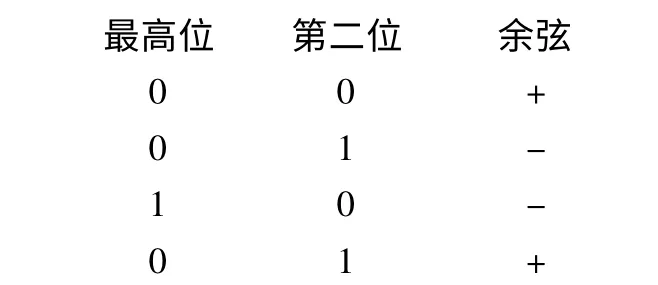
象限判别器的作用是判别数字量的值是在那一个象限内,正弦在一、二象限为正值,在三、四象限为负值。余弦在一、四象弦为正值,二、三象限为负值。因此用最高位是0 或1 来表示正弦的正或负,而用最高二位值来决定余弦的正和负,其逻辑关系表示如下:
◆正、余弦选通器
正弦和余弦互为余数,因此若规定选用缓冲寄存器触发器的“1”端为正弦的输出,则触发器的“0”端就为余弦的输出,这样正弦和余弦互为反码。
但是正、余弦选通器究竟送出正弦还是送出余弦尚取决于角度是处在那一个象限。例如30°、120°、210°、300°是表示在不同象限内四个角度。显而易见,如果不管这四个角度所处的象限,那么它们都是30°,也就是说,除了最高二位数字位之外,它们的其余各位数字位是相同的[3]。
3 输入电压值的采样及A/D 转换和角度的换算
实现模拟到数字的转换,最初遇到的问题是把连续的模拟量变为断续的数字量的问题,这就是采样和量化的问题。在任何瞬间,模拟电路的输出总是与其输入和电路的传递函数的乘积有关。当输入变化是时间的连续函数时,输出必然是时间的连续函数。但是,在A/D 转换中就不是这样,不管A/D 转换器工作速度有多快,完成一次转换总要占有一定的时间。另外,A/D 转换器只有在输入信号周期内一个很短的时间间隔之内测量输入信号。通常输入信号在一个周期内有足够的时间完成多次的转换。所以,模数转换器最初的工作是进行采样。采样过程就是把一个连续时间函数的信号,用一定时间间隔的离散函数来表示。模拟量转换成数字量,包括时间和幅值两方面的量化,通过时间和幅值的量化,把信号编成各种数字的代码。这样,一个连续的模拟信号经过时间上、幅值上的量化以及幅值上的编码,就成为一个断续的数字量。采样过程可以是恒速采样,即等时间间隔的,也可以是变速采样。我们研究的是恒速采样。采样过程可看作是脉冲调制过程,即连续信号变换成一系列窄的振幅调制脉冲。也可以把采样器看作是带有单位采样函数产生器的调制器。对于采样,我们 所关心的和感兴趣的问题是:输入信号在通过采样器之后,其输出信号能否完全重现原来的输入信号,而没有任何的信号的混淆或失真。
当轴角编码器把正、余弦电压换算出来以后,经过模拟开关的输入通过通道选通输出后,再经过跟随器或比例放大后,进行信号采样保持,最后进入AD574 的转换。AD574 把模拟信号转换成为相应的数字信号,然后进入373 锁存器把数字信号锁存起来。这样,就完成了模拟信号到数字信号的转换工作。当对转换出来的角度进行计算时,需要通过系统把数据从373 锁存器读出来。经过角度的换算公式和象限判别计算出角度值。在判象限时总共分成8 个象限来判别。然后对换算出来的粗精二组角度值进行粗精组合,粗∶精=N∶1。粗满量程为6 000 密位,精满量程为300 密位,210=1 024 故在360°里对应的数码为1 024。显然相差一个数码对应的粗密位数6 000 密位/1 024=6 密位。对应的精密位数300 密位/1 024=0.3 密位。粗精组合出的结果就是最终的角度,就是方位角、高低角等。
4 结束语
通过对轴角编码器的A/D 转换,使我不但学到了硬件方面的知识,而且也学到了软件方面的知识。对ISA 总线的使用有了更深的理解和掌握。对火控计算机的系统有了更进一步的了解。对系统的调试和问题解决也有了一定的经验知识。通过理论与实践的相结合,使我对知识更进一步的加深了。
[1]朱申培.航空火力控制原理[M].北京:国防工业出版社,2009.
[2]孙世宇,段修生,王立东,等.自行高炮火控系统原理[M].石家庄:军械工程学院出版社,1998.
[3]张立群.火力控制系统的研究[D].南京:南京航空学院,1999.