带增程器的电动车控制系统设计
2014-11-28袁守利
袁守利 高 寒
(武汉理工大学汽车工程学院 现代汽车零部件技术湖北省重点实验室 武汉 430070)
0 引 言
电动车具有节约能源、污染排放少等优点,其市场应用越来越广泛[1].但是目前动力蓄电池的能量密度较低,制约了电动车的性能,其一次充电可实现的续驶里程与燃油汽车一次加油的续驶里程相比,还有一定差距.为了解决这一问题,将燃油发动机和发电机组成的发电机组作为增程器,与动力蓄电池一起构成动力源,以增加续驶里程,是目前阶段最好的一种过渡方案[2].
现阶段,电动车越来越多地采用以单片机和DSP为主的数字控制,并开发出了很多以它们为核心的控制系统.然而,这些控制系统具有单片机处理任务量过大,功能分配不够合理,PCB 板元器件较多,布线过于繁密等缺点,加之带有增程器的电动车运行工况复杂多变,给系统的稳定性、可靠性和电动车的安全性带来了隐患,影响了控制系统的使用寿命,增加了电动车的维护成本.
为了解决这些问题,设计一种以单片机结合专用控制芯片的电动车无刷直流电机及带增程器的整车控制系统.这种控制系统具备安全性高,稳定性好,功能完善,控制效率高等优点,能很好的解决增程式电动车在使用和控制方面的上述问题.根据车辆运行状况,通过对驾驶员操作指令及传感器信号数据的采集,整车控制系统控制增程器、电机等及各外围执行机构稳定高效的工作.
1 控制系统方案
电动车的动力系统主要由增程器、电机、动力蓄电池和仪表等构成,它们是整车控制器的主要控制对象.整车控制器对接收到的车辆运行状况信息,蓄电池组状况信息和驾驶员操作指令信息进行综合分析,并根据相应的控制策略处理计算后,将得到的控制信号传输给电机专用控制芯片,专用控制芯片结合来自电机位置传感器的信号,进行开关电路的正确导通,从而实现对电机的控制,并最终实现对电动车的控制.因为带增程器的电动车具有动力蓄电池和发电机组2个动力源,所以在实际应用中就要求整车控制器能实现对于2个动力源的控制,即合理的控制增程器开/关机的时刻.
该控制方案的特点如下:(1)单片机结合专用控制芯片的控制方式,使系统的智能化程度更高,结构和编程更简单;(2)单片机控制专用控制芯片,专用控制芯片直接控制电机,充分发挥专用控制芯片的功能,减少了独立元器件的使用,能使控制系统结构更简单,故障率更低;(3)专用控制芯片的使用,减轻了单片机的工作负担,这样就能让单片机更好的实现控制策略和其他附加功能,提高了对电机和电动车控制的灵活性.
2 整车控制策略
2.1 电机控制策略
目前电动车车速的调控主要是通过油门装置实现的,为达到改善电动车操控性的目的,把车辆行驶过程中的实际车速引入到了电机控制系统中,建立以车速为控制目标的电动车无刷直流电机驱动系统控制模型[3].见图1.

图1 系统控制模型
电动车行驶工况复杂多变,采用传统的固定参数PID 控制方式难以达到较好的效果[4];同时为了让车辆实际车速对驾驶员目标车速准确而快速地做出响应,以得到更好的操控性能,控制系统采用基于车速偏差的增量式PI控制算法[5-6].车速传感器测得的实际车速与驾驶员给定的目标车速相比较,得到速度偏差信号e,控制系统依据偏差信号e进行增量式PI控制算法运算,得出速度增量信号Δ,根据运算的结果进行脉宽调制计算后输出PWM 波,PWM 波通过控制功率逆变电路来对电机进行调速,从而实现对车速的调控,达到驾驶员的操控目的.控制策略具体实现原理见图2.

图2 控制策略实现原理
在电动车运行过程中,驾驶员通过油门装置给控制系统的是一个与实际车速成比例关系的电压信号,以此电压信号为控制量,增量式PI控制算法的表达式为

式中:u(k),u(k-1)分别为第k次与第k-1次采样时刻车速信号值;e(k),e(k-1)分别为第k次与第k-1次采样时刻车速信号偏差值;K0=Kp+KI,K1=-Kp,Kp,KI分别为比例系数和积分系数.
根据式(1)~(2),若设电动车通过加速装置给出的驾驶员目标车速信号为v0,通过车速传感器测得的实际车速信号为vk,则在第k次采样时的车速信号偏差为e(k)=vk-v0(k).同理可得e(k-1)=vk-1-v0(k-1),且系统在计算e(k)之前,系统已先对e(k-1)进行保存.以e(k),e(k-1)作为输入,根据式(2)可以计算出增量Δu(k),再根据式(1)计算出此时实际车速对应车速信号u(k)来进行脉宽调制计算,计算程序流程见图3.

图3 控制算法程序流程图
2.2 增程器能量管理策略
因为增程式电动车拥有2种不同的能量源,能量管理策略就在整车控制策略中占有最重要的地位.现阶段对于能量管理策略的研究主要侧重于3种方法:(1)逻辑门限控制策略[7];(2)自适应控制策略[8];(3)基于模糊逻辑或神经网络的只能控制策略[9].
在逻辑门限控制策略中,比较直接和常用的能用于增程式电动车的是定点能量管理策略,该策略从优化发动机工作点出发,兼顾蓄电池荷电状态(state of charge,SOC)的平衡.增程器的开/关机根据蓄电池的SOC 而决定,即当SOC 下降到设定的下限SOClow时,增程器起动,输出恒定功率,SOC上升;上升至高于SOChigh后增程器关机,此时电动车以纯电动行驶,排放为零,SOC 下降.因为发动机与路面负荷相脱离,再加上蓄电池的负荷均衡作用,使得发动机在燃油效率较高的工作点恒定工作,从而提高了发动机的效率,同时减少了废气的排放[10].
增程器工作时输出的功率,一部分用于克服车辆的行驶阻力,一部分用于为动力蓄电池充电,所以在选择增程器开/关机时相对应的蓄电池SOC门限值SOChigh和SOClow时,要考虑到电池充放电的经济性,使电池在充放电效率最高的区域工作,从而得到较好的经济性和动力性.
中国乘用车市区工况CUDC 是一种典型的循环工况.在定点能量管理策略下,对20 个CUDC循环工况进行模拟仿真,得到蓄电池SOC和发动机功率随行驶距离的变化关系,见图4.其中,发动机恒定功率为10.8kW,蓄电池SOC 初值为1.0,增程器开/关机时蓄电池SOC 的充放电区间取0.3~0.7[11].从图4的仿真结果可以看出,当蓄电池SOC下降到0.3时,增程器起动,发动机在预定的高效工况点工作,其输出地功率一部分用于驱动车辆行驶,另一部分为蓄电池充电,使蓄电池SOC 值持续上升.当蓄电池SOC 升高到0.7时,发动机停机,电动车纯电动行驶.如此反复,直至耗尽油箱内的燃油.由仿真可得,该能量管理策略有效可行.
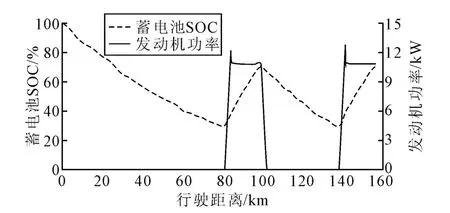
图4 20个CUDC工况下的仿真结果
3 硬件设计及软件开发
3.1 硬件结构
根据电动车无刷直流电机控制系统的设计方案,实现整个控制系统良好的功能,其硬件电路结构见图5.

图5 控制系统硬件电路结构框图
3.2 硬件的选型
基于控制系统的功能要求和成本考虑,选用Microchip 公司生产的8 位RISC 结构的单片机PIC16F877.专用控制芯片选用Motorola公司的第二代无刷直流电机专用集成电路MC33033,它在外接上功率开关器件(MOSFET)后,可以用来控制三相(全波或半波)无刷直流电机,当其结合MC33039电子测速器作为F/V 转换(系统检测模块),引入了测速反馈后,可以构成闭环速度调节系统.该控制系统中,专用控制芯片主要是通过接收来自单片机的控制信号对电机进行直接控制.
3.3 软件设计流程
系统软件进行模块化设计,方便日后维护和系统功能完善升级.单片机是整个系统管理和控制中心,其主要包括主程序、中断服务程序这2个部分,整个电机控制系统主程序流程框图见图6.

图6 控制系统主程序流程图
4 系统调试实验
整车调试主要指的是弱电和强电两种调试.弱电调试是为了确定在整车低压上电以后,各控制器及部件能实现正常的上电和开闭.之后进行强电调试,接通电机和增程器,证实整车控制器设定的整车控制策略,验证是否能够根据动力蓄电池SOC的数值自动控制增程器的开闭.
无刷直流电机在带负载情况下进行启动,其速度响应曲线见图7.由图7可看出,电机带载启动时,电机转速经过短暂的振荡后很快恢复并稳定到某一指定转速,电机速度响应快,抗干扰性较强,能较好地满足电动车的使用性能要求.
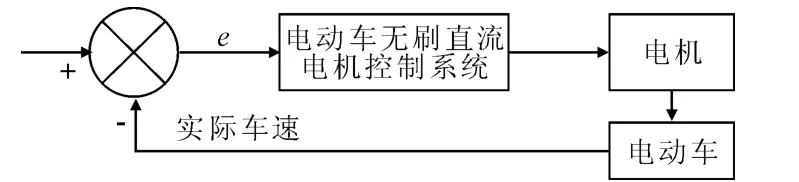
图7 转速响应曲线
最后在试车场进行路试,验证车辆是否达到预期要求的动力性和续使里程等指标.
5 结束语
根据增程式电动车的使用性能要求及特点,介绍了整车控制器及其控制策略的设计流程,设计了一种以单片机结合专用控制芯片的增程式电动车控制系统.整个控制系统实现了根据动力蓄电池SOC的数值自动控制增程器的开闭,将整车的控制和电机控制、增程器开闭控制进行了有效的结合,减少了单片机处理任务量和PCB板元器件数量,是一种有效的电动车控制方案.
[1]曹秉刚,张传伟,白志峰,等.电动汽车技术进展和发展趋势[J].西安交通大学学报,2004,38(1):1-5.
[2]李 玲.介于纯电动和混合动力之间 增程式:新源客车的平衡点[J].商用汽车新闻,2010,44(2):55-58.
[3]李斌花.纯电动汽车电机驱动系统控制策略研究[D].长沙:湖南大学,2005.
[4]ISHIDA A.A self-tuning automotive cruise control system using the time delay controller[C]∥SAE.Technical Paper,1992,920159.
[5]HUANG Hong,CHANG Liuchen.An error-driven controller for electric vehicle propulsion systems[C]∥IEEE,CCECE,1997(6):744-747.
[6]王俊敏,张云龙,袁大宏.汽车数字式巡航控制系统的研制[J].汽车技术,2000(8):4-7.
[7]KIMURA A.Drive force control of a parallel-series hybrid system[J].JSAE Review,1999,20(3):337-341.
[8]JOHNSON V H.HEV control strategy for real-time optimization of fuel economy and emissions[C]∥SAE Paper,2000-01-1543,2000.
[9]BAUMANN B M.Mechatronic design and control of hybrid electric vehicles[C]∥IEEE/ASME Transactions on Mechatronics,2000,5(1):58-72.
[10]牛继高,周 苏.增程式电动汽车增程器开/关机时刻的优化[J].汽车工程,2013,35(5):418-423.
[11]张华辉,齐铂金,庞 静,等.动力锂离子电池荷电状态估计的建模与仿真[J].哈尔滨工程大学学报,2009,30(6):669-675.
