潜艇自动舵控制方法研究*
2014-11-28黄佳帅
黄佳帅
(92730部队 葫芦岛 125000)
1 引言
潜艇作为一种能长时间在水下隐蔽机动的武器受到各国重视,而如何精准地控制航向和深度在很大程度上决定着潜艇生命力和战斗力,这就要求舵手操作过硬,经验丰富,精力集中,然而长时间在海上航行人员容易疲惫,并且人为操舵受到周围环境影响较大,难以保证万无一失,如果在潜艇上装备技术成熟的自动舵,那么潜艇战力将大大提升。
2 自动舵的发展现状及趋势
自上世纪70年代起,国内一些科研院所、高校开展自动舵的理论与开发工作,并取得了不少成果,一些航海仪表厂家也独立或与研究所、高校合作开展了自动舵的试制和生产,其产品以模拟PID舵为主。目前国外市场上有多种成熟的航向舵、航迹舵产品,其控制方法大多为比较成熟的自适应控制。目前美国、俄罗斯等发达国家已经在潜艇上运用了自动舵技术,并且使用效果较理想[1]。
目前自动舵的发展向着以下几个方向发展:
1)实现实时综合数据船桥系统功能。
2)整个系统采用模块化结构。
3)系统人机界面全部菜单化,采用游戏杆或跟踪球等进行操作。
4)采用双罗经、双计算机控制系统配置以提高可靠性和安全性。
5)配备电子海图显示和信息系统。
6)中央控制台按照设备功能集成的原理,把“监督(雷达,ECDIS)”和“控制(航迹舵)”等集成在一起。
7)采用航行优化和安全系统。它能综合几天的天气预报、海况、船舶经济性和计划时间等信息,制定航行策略。
3 自动舵主流控制方法
3.1 PID控制
PID控制是最早发展起来的控制策略之一,由于其算法简单、鲁棒性好、可靠性高等优点,被广泛应用于工业过程控制。当用计算机实现后,数字PID控制器更显示出参数调整灵活、算法变化多样、简单方便的优点[2]。将偏差的比例(P)、积分(I)和微分(D)通过线性组合构成控制器,对被控对象进行控制,这就是PID控制器。PID控制器系统原理框图如图1所示[3]。

图1 PID控制器系统原理框图
常规PID控制系统一般只适用于线性系统,且不能根据实际情况在线调整增益系数,致使其不能满足在不同的偏差和偏差变化率下对控制器的PID参数进行自整定的要求,从而影响系统的控制精度和系统的稳定性。利用模糊控制规则在线对PID参数进行修改,便构成了自适应模糊PID控制器。
目前较成熟的PID自整定方法有:
1)经验公式法:Ziegler-Nichols设定方法、ISTE最优设定方法和临界灵敏度法;
2)仿真试验法。
Ziegler-Nichols设定方法:受控对象大多可近似用一阶惯性加纯延迟环节来表示,传递函数为

对于典型PID控制器:

Ziegler-Nichols整定公式:

实际应用时,通常根据阶跃响应曲线(图2),人工测量出K、Tp、τ参数,然后按式(3)计算kp、TI、TD。
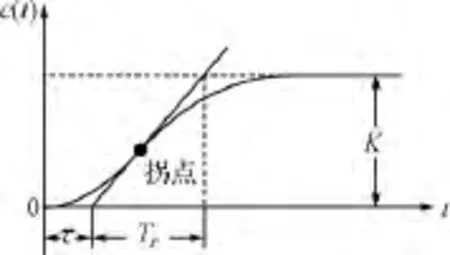
图2 阶跃响应曲线
3.2 自适应控制
目前船舶操纵中提出的自适应方法,主要有自适应PID设计法、随机自适应法、模型参考法、基于条件代价函数的自校正法、最小方差自校正法、变结构法、自线性二次高斯法等。
一般经典的控制方法运用有两个前提:一是对象的模型是精确的、不变化的,且是线性的;二是操作条件、运行环境是确定的、不变的。实际上,一般的工业控制系统只是粗略、近似的满足这些条件,这就导致了系统控制性不高。自适应控制是针对对象特性的变化、漂移和环境干扰对系统的影响而提出来的,其基本思想是通过在线辨识或通过某种算法使这种不确定或变化的影响逐渐降低,以至消除,并修正控制器自己的特性,以适应对象和扰动的动态特性变化。
3.3 智能控制
对有限维、线性、时不变的控制过程,传统控制法是有效的,但实际船舶系统常具有不确定性、非线性、非稳定性和复杂性,很难建立精确的模型方程,甚至不能直接进行分析和表示。而根据人工操作者的处理经验和正确的理解,就可有效地控制船舶航行,这就是智能舵。智能舵分为专家系统、模糊舵和神经网络舵三种。
3.3.1 专家系统
专家系统是目前人工智能中最活跃、最有成效的一个研究领域,它由知识库、数据库、推理机、信息获取、控制算法五部分组成。知识库以适当形式存储由专家提供的在某个领域的专门知识和经验以及书本知识和常识,主要起到知识的存储功能。数据库存放专家系统当前工作已知的一些情况,用户提供的事实和由推理得到的中间结果。推理机主要根据获取到的输入信息,利用知识库中的知识模拟专家的思维过程,控制并执行对问题的求解。信息获取指的是获取由其闭环控制系统的反馈信息以及系统的输入信息。控制算法是专家控制系统的直接控制部分,由推理机作出的决策通过控制机构付诸实现。专家系统PID舵控制系统结构图如图3所示。
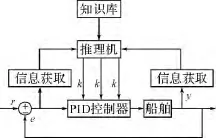
图3 专家系统PID舵控制系统结构图
3.3.2 模糊控制
模糊控制通常由模糊化、知识库、模糊推理和非模糊化几部分组成[4]。模糊化的作用是将参考输入、对象输出等精确量化成模糊量,是得到模糊推理中的前提;模糊推理是模糊控制的核心,具有模拟人的基于模糊概念的推理能力;非模糊化将模糊推理得到的控制量转化为实际可用的精确量;知识库包含了用于模糊化和非模糊化的各语言变量的模糊分割、隶属函数等数据库信息,以及用于模糊推理的一系列控制规则构成的规则库,构造了模糊推理中的前提[5]。

图4 模糊控制器的基本结构图
3.3.3 神经网络控制
神经网络是人工神经网络的简称,它由若干个人工神经元(简称神经元)互联组成网络。神经网络一方面受结构与特性的制约,另一方面受环境的影响,即神经网络可通过自组织、自学习不断地适应外界环境的变化,神经网络的工作方式包括两个阶段[6]:
1)学习期:神经元间的联接权值(和神经元非线性函数参数),可由学习规则进行调整,以使目标函数达最小。
2)工作期:联接权值(和神经元非线性函数参数)不变,根据网络的输入得到相应的输出。
神经网络的模糊PID控制器结构框图如图5所示。

图5 神经网络的模糊PID控制系统结构
4 自动舵在潜艇中的应用
潜艇控制系统是一种惯性大、非线性的复杂控制系统。目前潜艇自动舵通常采用常规的PID控制保持定向或定深运动,自动舵舵原理简图如图6所示。

图6 自动舵原理简图
自动舵需要依赖精确的数学模型,而且控制参数确定后,仅能适应特定的环境条件,无法适应环境条件的变化。首先,当船舶的动态特性或外界条件发生变化时,控制参数需进行人工整定,若控制参数不合适,将导致控制效果变差,操舵幅度大,操舵频繁,舵机损耗大,缺乏对船舶动态变化及海况变化的自适应能力;其次,对于高频海浪干扰采取的高频转舵,将产生持续性偏航,致使航行精度降低,能量消耗加大。因此航向深度变化不大时,自动舵可以精准地控制船舶,保证航行安全,但在用舵频繁或海区环境变化较大的情况下,自动舵将失去其优势,取而代之的是人工舵,但是随着科技的发展,如智能控制等先进控制方法的进一步完善,舰船全面实现自动舵将是一种大趋势。
[1]程启明,刘其明,王志宏.船舶自动舵控制技术发展研究[J].计算机自动测量与控制,2000(8):1-4.
[2]刘金琨.先进PID控制MATLAB仿真[M].第二版.北京:电子工业出版社,2004.
[3]康杰.基于MATLAB的模糊PID参数自整定仿真研究[J].仪表技术,2008(12):20-22.
[4]廖力达,王北战,章运奇.自适应模糊PID控制器的研究与应用[J].建筑机械,2009(15):59-62.
[5]胡锦晖,胡大斌.PID参数模糊自整定控制器的设计与仿真研究[J].海军工程大学学报,2005(1):97-100.
[6]霍星星,余婷.基于BP神经网络的PID船舶自动舵[J].中国水运下半月,2013(12):165-167.
[7]梁利华,杨鹏,马洁.模糊PID控制器在船舶实验台横摇位置系统中的应用[J].船舶工程,2006(1):32-35.
[8]靖固,张科,孙玲玲.不完全微分PID控制的FPGA的研究[J].微计算机信息,2009(13):52-53.
[9]黄勇亮,卢晓春.船舶舵机的模糊PID控制[J].装备制造技术,2009(7):34-35.
[10]纪玉荣.中小型轧钢厂加热炉温度专家控制的应用[J].新技术新产品,2009(12):23.