基于时滞模型预测控制算法的网络化AGC 研究
2014-11-25付鹏武周念成王强钢
付鹏武 周念成 王强钢 陆 巍
(1.重庆大学输配电装备及系统安全与新技术国家重点实验室 重庆 400044 2.国网娄底供电分公司 娄底 417000 3.安徽省电力科学研究院 合肥 230022)
1 引言
传统AGC 采用专用通信通道,运行设计时不需考虑通信延时对系统的影响[1]。基于综合信息网络的网络化AGC 以其开放性、信息共享度高、控制灵活、成本低廉[1-4]等优点,将逐渐成为智能电网环境下二次调频控制方式,但是网络化AGC 也带来了通信延迟、数据包错序及丢失等问题。通信延迟包括能量管理系统(EMS)到电厂自动化系统的广域网通信延迟、电厂自动化调速器到机组执行机构的局域网通信延迟[4,5]。通信延迟是导致网络化AGC 系统不稳定和动态控制性能下降的主因[1],文献[3,4]的研究表明当通信系统超过3 次连续数据包丢失时,传统AGC 系统无法保障负荷频率控制的稳定。由于广域网通信延迟远小于EMS 信号发送周期,对网络化AGC 的稳定性影响不突出;而局域网通信延迟与机组执行机构的扫描周期接近,对网络化AGC 的控制性能影响显著。文献[5]针对调速器到执行机构的通信延迟,提出将时滞依赖性稳定设计方法引入网络化AGC 控制器,利用H∞控制理论设计状态反馈控制器;文献[2]则采用混合H2/H∞鲁棒控制进行不确定时滞AGC 系统的控制设计。但是采用鲁棒控制、传统比例积分(PI)控制或滑模变结构控制[6],都无法实现时滞网络化AGC 在线最优控制,而模型预测控制(MPC)对于时滞性系统、不确定性系统的控制性能和鲁棒性优势显著[7],并且能够实现控制量的实时在线优化控制。文献[8]提出采用分布式MPC 控制实现互联电网的二次调频,结果表明采用MPC 的AGC 具有更好的动态控制性能,但该研究只是针对传统专线式AGC;文献[9]采用基于状态收缩约束的模型预测控制策略进行负荷频率控制,通过引入状态收缩约束以保证MPC 控制的稳定性。MPC 不仅能够实现时滞系统的在线滚动优化,其多步超前预测可解决网络化AGC 的数据包丢失问题。但还未见文献对时滞不确定的网络化AGC 系统采用时滞MPC 算法进行研究。
由于调速器到执行机构的局域网属于封闭式的静态网络,其通信延迟随机变化但波动范围较小(小于300ms)[4],同时广域网通信中数据包排队和传播过程复杂,存在偶发数据包丢失的风险。因此,网络AGC 系统设计时须考虑静态网络通信延迟的随机波动性,还应具备抵御偶发数据包丢失的能力。本文提出将时滞不确定的网络化AGC 系统采用非线性时滞模型进行预测控制,该方法采用计及通信延迟的时滞模型方程作为预测模型,利用最优加权法预测通信延时;并通过增加输出量预测值变化量以改进优化目标,减少机组调节次数;结合 MPC多步超前预测在执行机构端增设缓存器,通过缓存控制指令预测序列抵御广域通信网络的数据包丢失。在Matlab/Simulink 中建立两区域互联电网的网络化AGC 系统,通过随机延时、最大延时和系统数据包丢失时鲁棒性评价分析三个算例验证了该控制方法具有良好的动态响应性能,及其对通信延迟变化的良好适应性和较强的鲁棒性。
2 计及通信延迟的AGC 系统状态模型
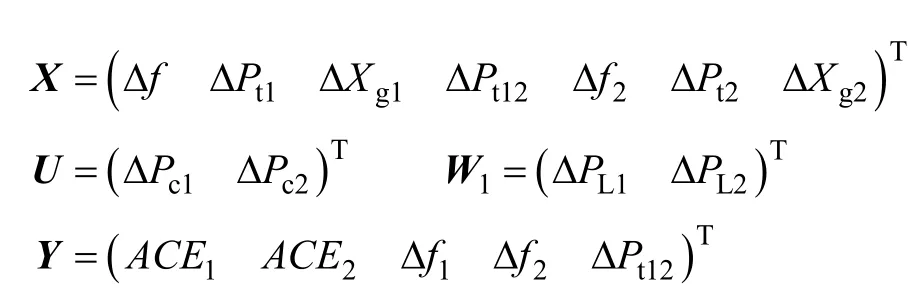
按照AGC 建模思想可以建立计及通信延迟的两区域互联电网的网络化AGC 模型如图1 所示。采用水轮发电机组作为二次调频手段,两区域各等值为一台发电机组。图中Tgi为调速器时间常数;Tchi为原动机时间常数;Ri为机组调差系数;Bi为系统调差系数;Mi为机组转动惯量;Di为负荷阻尼系数;ΔPti为原动机输出功率增量;ΔXgi为调速器位置增量;ΔPci为MPC 控制输出量;ΔPLi为负荷变化量;Δfi为频率偏移量;ΔPt12为联络线交换功率;ACEi为区域控制偏差;T12为联络线同步系数;τ 为调速器到机组执行机构的通信延迟时间。为应对广域网的偶发数据包丢失,在电厂信号接收端设置缓存器存储MPC 控制量的多步超前预测序列。
AGC 控制模式包括定频率控制、定交换功率控制、联络线功率频率偏差控制三种,本文以现代电网中最常用的联络线功率频率偏差控制(TBC)模式为例。网络化AGC 系统动态时滞状态方程可写为


图1 考虑通信延迟的两区域互联电力系统AGC 系统动态模型Fig.1 Two-area interconnected power system AGC dynamic model considering communication delay
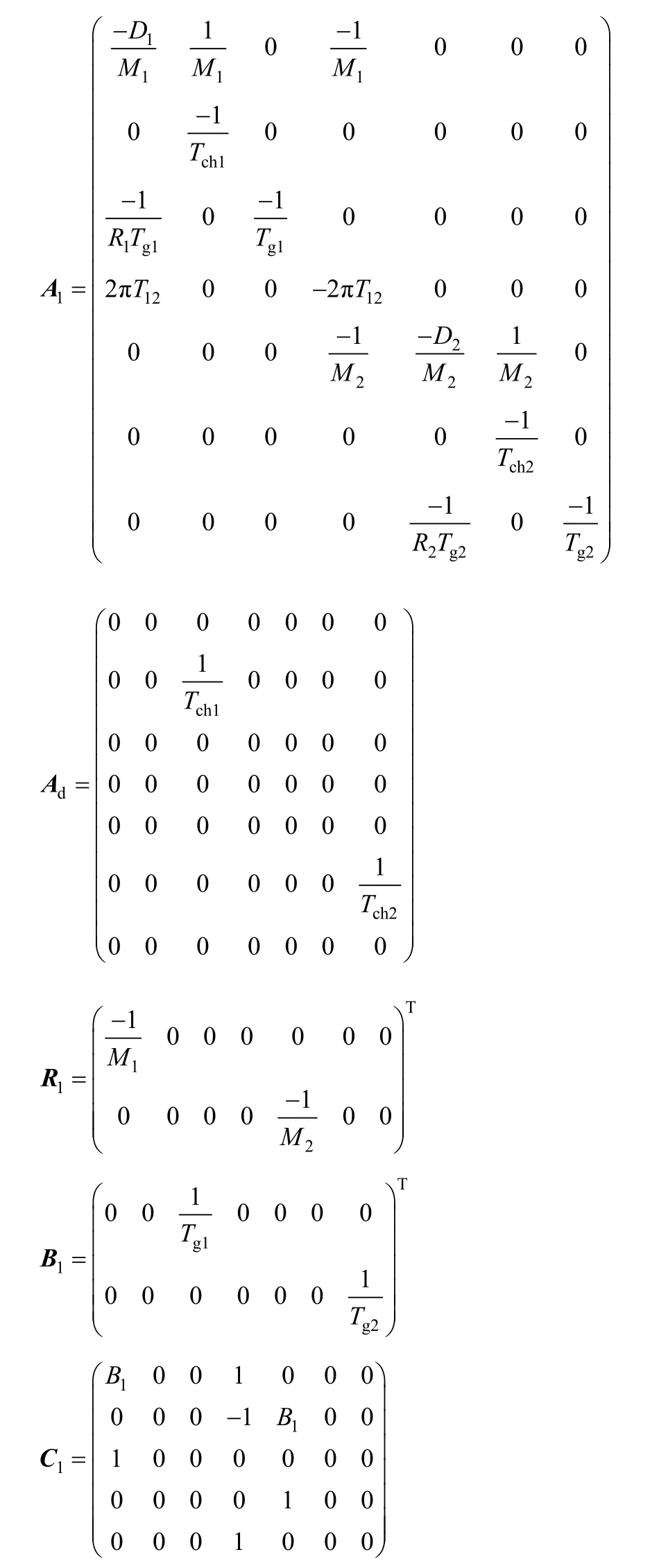
式中,X、U、W1、Y 分别为状态变量、控制变量、扰动量、输出量;A1和Ad、B1、R1、C1分别为系统状态矩阵、输入矩阵、扰动矩阵、输出矩阵,详细矩阵参数见附录。其中
3 网络化AGC 系统时滞模型预测控制设计
本文应用MPC 中的广义预测控制模式,采用时滞模型预测控制方法[10,11]。该方法由延时预测、预测模型、滚动优化和反馈校正四部分组成。利用最优加权法预测通信延时,再将包含预测延时的时滞模型作为MPC 预测模型,并改进在线滚动优化目标函数进行优化控制。并在机组信号接收端增加缓存器,应对网络化AGC 的数据包丢失。
3.1 延时预测
实际中对网络化AGC 控制性能影响显著的通信网络为封闭式静态局域网,其产生的通信延时随机波动但变化较小。由于最优加权法有预测精度高、计算量小、适于在线分析等优点[12],本文利用最优加权法对随机延时进行预测,以实现通信延时预测与时滞MPC 在线滚动优化的结合。最优加权法以目标函数ek最小为目标,根据极小极大化原则求取权值ωi,最优加权法模型可描述为

式中,τk为k 时刻观测时延;τi′为i 时刻预估时延;ωi为各时刻观测值权重系数。为消除权值的约束条件引入下式计算各权重系数。

式中,λi为误差指数参数,采用梯度下降法可得其递推公式为

式中,γ 为效率因子(0<γ<1)。将式(3)代入式(2)对其求偏微分得∂ek/∂λi-1,再代入式(4)可得

根据式(5)和式(3)求得ωi,再由式(6)加权求和可得到下一个延时预测值τk+1

3.2 预测模型
将网络化AGC 系统的时滞方程离散变换成受控自回归滑动平均模型形式(CARMA)如[10,11]:

式中,y(k)和u(k)分别为k 时刻AGC 状态方程n 个输出量组成的输出行向量(n=5)和m 个控制量组成控制列向量(m=2);ω(k)为白噪声向量序列;d=[τ/T]+1 为系统时滞系数,[τ/T]为不超过τ/T 的最大整数,τ 为下一通信延时预测值,T 为离散系统的采样时间。A(z-1)和B(z-1)分别为n×1 和n×m 阶矩阵,即
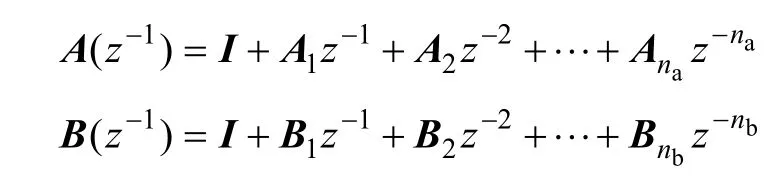
式中,na和nb为模型输出和输入的阶次。为得到在k 时刻对未来第j 步输出量的预测值y(k+j|k),采用时滞系统丢番图(Diophnatine)方程[11]:

式中,j=1,2,…,N,N 为预测时域,矩阵Ej、Fj、Gj和Hj可由式(7)和预测步长j 通过递推唯一确定[10]。将式(7)和式(8)联立可得到输出值的预测方程如式(9)所示,以下预测的初始时刻均为k 时刻,为简化书写略去括号内的z-1算子:

式中,Δu(k+j)为控制量的第j 步预测变化量。将上式中各输入输出量的不同预测步长的向量和参数矩阵合并,扩展成式(10)预测模型方程:

式(10)中向量组和分块矩阵的具体形式如下所示,下列各式中M 为控制时域(M<N),u(k+d)为时滞系统k+d 时刻的最优输入控制量。

3.3 滚动优化
本文中AGC 系统的TBC 目标以普遍采用的功率分区域就地平衡准则为例,各输出量的跟踪目标值均为0。为提高AGC 跟踪速度,避免发电机组频繁调节,将MPC 优化函数的输出量部分改进为预测输出误差和输出预测值增量两部分,通过增加输出预测值增量的权重调节控制量预测序列的增量,以减少机组不必要的调节。按上述方法将传统滚动优化目标函数改进为

式中,kj、λj为加权值,滚动优化是通过在每一个采样时刻求解控制增量Δu 满足上述优化目标函数的最优解,得到MPC 的最优控制律。该控制律求解为二次规划问题,在本文分析中利用Matlab 优化工具箱的二次规划quadprog 函数完成滚动优化求解。
3.4 反馈校正
考虑到随机时滞系统的非线性和扰动等不确定性因素,在k-1 时刻控制作用实施后,在k 时刻测量到系统实际输出值y0(k)与输出预测值y(k│k-1)相减可得误差向量e(k):

利用误差向量e(k)来修正其他时刻的预测起始值如

修正后的向量y(k)将作为未来时刻滚动优化的初始值。每次测量实际输出后,都修正预测初始值,从而将MPC 构成闭环负反馈控制系统。
3.5 缓存存储器
实际中还须在机组执行器控制信号的接收端设置缓存器,用于存储MPC 控制器发来的多步超前预测控制信号,作为网络化AGC 中广域通信网数据包丢失时的次优输入控制量。其工作原理是:
(1)缓存器接收到新的数据包时将与其原数据包进行时标比较,若迟于原数据包时标,缓存器将更新存储内容;否则认为错序,则丢弃。
(2)执行机构按照固定周期T 扫描缓存器的控制量信息,当数据包发生错序或丢失时,缓存器数据包未更新,执行器将读取原数据包中控制量的下一步预测值作为次优控制量输入,如图2 所示;当网络通信和数据包更新正常时,执行机构将通过时标对比选择对应延迟步长的最优预测控制量作为输入,执行机构如此反复扫描读取缓存器的控制量预测值。

图2 执行机构读取缓存器中控制量的原理Fig.2 The principle of actuator read the controlled variable in buffer
4 仿真分析
在Matlab/Simulink 中利用MPC 函数工具箱构建如图1 所示的TBC 模式下两区域互联电网的网络化AGC 系统仿真模型,详细参数见附录[13],按照前述方法设计时滞模型预测控制器。设效率因子γ=0.9、采样周期为T=0.1s、预测时域N=15、控制时域M=10、kj=5、λj=1。通过三个案例仿真验证本文所提方法的正确性:①案例1 在随机通信延迟条件下,分别采用传统MPC 和本文提出的时滞MPC两种控制方式来对比 AGC 系统阶跃响应的动态性能;②案例2 在最大通信延迟环境下进行阶跃响应仿真分析,考察系统对通信延迟环境的适应性;③案例3 在随机通信延时下系统运行条件发生变化,但控制器参数维持不变的情况下进行仿真,发生丢包情况下通过仿真对比分析本文控制方法的鲁棒性。
4.1 案例1
仿真中采用图 3 所示随机通信延时序列,在t=0.01s 时对区域1 和区域2 分别施加ΔPL1=0.03(pu)和ΔPL2=0.01(pu)的阶跃负荷扰动。为对比系统的动态响应性能,分别采用本文提出的控制方法和传统MPC 控制方法进行仿真,其中传统MPC 为不带通信延迟预测、优化目标改进的广义MPC 控制方法,不同控制方式下各区域的输出响应曲线如图 4~图7 所示。

图3 通信随机延时序列Fig.3 Random communications delay sequence

图4 频率偏移量响应曲线Fig.4 Frequency deviation response curve

图5 ACE 响应曲线Fig.5 ACE response curve

图6 联络线交换功率响应曲线Fig.6 Tie-line switching power response curve
图4 和图5 分别为两区域电网的频率偏移和区域控制偏差,由图4 可知,与传统MPC 控制相比,采用本文控制方法的各区域频率波动的超调量和调节时间都明显减小。同样在图5 中本文方法的ACE超调量及调节时间显著变小,并且发电机组的调节次数也减少。图6 中采用本文方法时电网联络线交换功率仅须经8s 即恢复原状态,而采用传统MPC方法则须16s 的调节时间,且本文方法的交换功率超调量远小于传统MPC 方法。图7 显示采用本文方法时各区域发电机组对扰动负荷的动态响应均有明显改善。前述仿真结果表明在随机通信延迟环境下,本文方法可使网络化AGC 系统具备优异的动态响应性能,由此证明了本文所提控制方式是有效的;并且与针对固定通信延时的控制算法仿真方式相比,本文的仿真结果更接近实际情况。

图7 机组输出功率偏差响应曲线Fig.7 Unit output power deviation response curve
4.2 案例2
考虑到正常的通信延迟小于300ms,为检验本文控制方法对通信延迟的适应性,采用与案例 1相同的时滞MPC 控制器参数和负荷扰动条件,设在t=0.01s 时负荷阶跃变化的同时,通信延迟变化至持续最大延时500ms。在此条件下采用本文方法的AGC 系统的动态响应仿真结果如图8~图10 所示,为便于比较,图中还给出了案例1 中在随机通信延迟下采用本文方法的动态响应曲线(图中案例1)。

图8 频率偏移量响应对比Fig.8 Frequency deviation response comparison
由图8~图10 中案例1 和案例2 的响应曲线比较可知,当通信延时为500ms 时,AGC 系统的频率偏移、ACE 和联络线交换功率的调节过程均略微加剧。但是图中也显示了即使在持续最恶劣的通信延迟环境下,采用本文控制方法时AGC 系统经过12s所有偏差量均能调整到原始运行状态,可见其动态响应性能依然处于良好的范围内。同时即使在最大通信延迟时下采用本文方法的AGC 动态响应的波动幅度仍远小于案例1 中传统MPC 方法的动态响应。由仿真结果可知本文控制方法对通信延迟环境具有较强的适应性,能够保障AGC 系统在随机通信延迟环境下具有良好动态响应控制性能。

图9 ACE 响应对比Fig.9 ACE response comparison

图10 联络线交换功率响应对比Fig.10 Tie-line switching power response comparison
4.3 案例3
设两区域互联系统运行参数在案例1 的条件下变化至另外一组参数(见附表2),而各控制器维持原有设置。同时都采用缓存器中控制量预测序列的第3 个控制值进行反馈控制,用以模拟系统发生数据丢包。仿真中通信延时仍为图 3 的时间序列,t=0.01s 两区域中加入ΔPL1=0.03(pu)和ΔPL2=0.01(pu)的阶跃负荷扰动时,各区域动态响应如图11~图13所示。
在系统运行条件变化但控制器参数维持不变的情况下,由图11~图13 分别与图4~图6 对比可知,两种控制方式下系统阶跃响应的超调量变大且调节时间变长,动态性能有所下降,但还是都能达到控制目标。仿真结果表明采用本文方法时系统在16s 后恢复原状态,而采用传统MPC 方法则需23s,并且与传统MPC 方法相比,本文方法的AGC系统各区域控制偏差量和频率偏移量的波动幅度均较小。

图11 频率偏移量响应曲线Fig.11 Frequency deviation response curve

图12 ACE 响应曲线Fig.12 ACE response curve

图13 联络线交换功率响应对比Fig.13 Tie-line switching power response comparison
当数据发生丢包的同时系统运行条件改变,尽管利用本文方法的控制量预测序列进行次优控制时系统性能有所下降,但动态响应效果仍优于传统MPC 方法。可见,与采用传统MPC 控制方式相比,本文提出的控制方法对时滞不确定的网络化 AGC系统具有更强的鲁棒性。
5 结论
本文针对网络化AGC 系统的通信延迟和数据包丢包等问题,提出了一种基于时滞模型预测控制算法的互联电网网络化AGC 系统控制方法。通过随机通信延迟、持续最大通信延时和系统数据包丢失时鲁棒性评价三个案例进行仿真测试,结果表明所提出的控制方法不仅能使网络化AGC 系统在正常通信延迟变化范围内保持优异的动态响应性能,在持续的最大通信延迟下也能维持良好的动态响应性能,并且与传统MPC 方法相比对系统运行条件变化时具有更强的鲁棒性。仿真结果证明本文方法是正确有效的,该方法对通信延迟变化具有较强的适应性和鲁棒性。
附 录
第2 节中两区域互联电力系统网络化AGC 动态模型的相关矩阵如下:
第4 节仿真案例中两区域互联电力系统网络化AGC系统参数见附表1 和附表2。

附表1 动态性能对比仿真参数

附表2 鲁棒性评价仿真参数
[1]Jiang L,Yao W,Wu Q H,et al.Delay-dependent stability for load frequency control with constant and time-varying delays[J].IEEE Transactions on Power Systems,2012,27(2):932-941.
[2]Bevrani H,Hiyama T.On load-frequency regulation with time delays:Design and real-time implementation[J].IEEE Transactions on Energy Conversion,2009,24(1):292-300.
[3]Bhowmik S,Tomsovic K,Bose A.Communication models for third party load frequency control[J].IEEE Transactions on Power Systems,2004,19(1):543-548.
[4]Xiaofeng Yu,Tomsovic K.Application of linear matrix inequalities for load frequency control with communication delays[J].IEEE Transactions on Power Systems,2004,19(3):1508-1515.
[5]段献忠,何飞跃.考虑通信延迟的网络化AGC 鲁棒控制器设计[J].中国电机工程学报,2006,26(22):35-40.Duan Xianzhong,He Feiyue.Networked AGC robust controller design in consideration of communication delay[J].Proceedings of the CSEE,2006,26(22):35-40.
[6]刘梦欣,王杰,陈陈.电力系统频率控制理论与发展[J].电工技术学报,2007,22(11):135-145.Liu Mengxin,Wang Jie,Chen Chen.Power system frequency control thory and development [J].Transactions of China Electrotechnical Society,2007,22(11):135-145.
[7]Carson J M.Robust model predictive control with a reactive safety mode[D].California:California Institute of Technology,2008.
[8]Venkat A N,Hiskens I A,Rawlings J B,et al.Distributed MPC strategies with application to power system automatic generation control[J].IEEE Transactions on Control Systems Technology,2008,16(6):1192-1206.
[9]孔莲芳,罗天祥,吴捷.基于状态收缩约束的模型预测负荷频率控制[J].中国电机工程学报,2007,27(7):18-22.Kong Lianfang,Luo Tianxiang,Wu Jie.State contractive constraint based model predictive load frequency control[J].Proceedings of the CSEE,2007,27(7):18-22.
[10]丁宝仓.预测控制的理论与方法[M].北京:机械工业出版社,2007.
[11]Jeong S C,Park P.Constrained MPC algorithm for uncertain time-varying systems with state-delay[J].IEEE Transactions on Automatic Control,2005,50(2):257-263.
[12]王万良,蒋一波,李祖欣,等.网络控制与调度方法及其应用[M].北京:科学出版社,2009.
[13]Kundur P.Power system stability and control[M].New York:McGraw-Hill Press,1994.
