PIV 技术在复杂二相流场中的应用
2014-11-21王波兰顾蕴松
王波兰,宗 昕,顾蕴松
(1. 上海机电工程研究所,上海 201100; 2. 南京航空航天大学,南京 210016)
0 引 言
光学元器件随飞行器在大气中飞行时,其工作性能越来越多地受到大气悬浮汇聚微粒的影响。目前,国内环境机构对于大气环境中颗粒物汇集的研究[1-3]更多侧重于常规条件下地域性、周期性的大气特性统计量的收集、整理;然而飞行器在自然环境中高速运动,其周围流场旋涡变化复杂,大气微粒在这样的复杂流场中呈现何种运动汇聚效应,对于合理准确评估机载/弹上光学元器件的工作效能具有十分重要的工程意义。实现对复杂二相流场中微粒分布特性的准确预估,才能够更有效地指导总体设计工作。
由于高速气动流场模拟本身就具有很大的难度,无论是地面风洞试验或者数值仿真都不能很全面再现实际飞行中的外部环境特性;而且对于大气环境中的颗粒分布特性进行实时测量也是环境研究中的难题,传统的环境研究仪器也很难满足试验要求。综上所述,结合气动复杂流场的大气粒子分布研究具有相当大的挑战,目前国内外公开发表的文献中也鲜有此类报道。
粒子图像测速技术( PIV) 是在流动显示的基础上,充分吸收现代计算机技术、光学技术以及图像分析技术的研究成果而成长起来的最新流动测试手段[4-7]。PIV 不仅能显示流场流动的直观形态,而且能够提供瞬时全场流动的定量信息,使流动可视化研究产生从定性到定量的飞跃,是目前空气动力学风洞试验中技术最先进、应用最广泛的试验手段之一。
作者在测量舵面翼梢脱落旋涡特性的基础上[7-13],创新地利用PIV 拍摄到的瞬态粒子原始散射图像,结合MATLAB 图像后处理技术,对原始粒子图像进行互相关、二值化处理,通过对图像区域内的灰度值计算,统计相对流场截面内的粒子浓度系数,得到在复杂旋涡结构流场内瞬态粒子的分布特性规律。
1 激光粒子图像测量
1.1 激光光路参数设计
PIV 基本设备构成如图1 所示,实验采用的PIV测试系统由美国TSI 公司生产。激光器作为主要元器件,采用Newwave 公司的双脉冲Nd: YAG 激光器提供微粒子散射所需能量,脉冲激光波长532nm,采用光学元件将脉冲激光光束转为片光,照射测试流场区域中的示踪粒子,通过对撒播粒子的流场连续两次曝光,用CCD 相机记录下两次曝光的粒子图像。
CCD 数字相机型号为TSI 公司的PIVCAM10-30,分辨率为1024 ×1376pixel,双帧频为15fps,它的特点是应用了Interline 技术使得两帧间的间隔可以小于1μs。
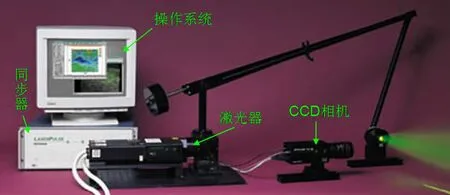
图1 PIV 设备基本构成Fig.1 The components of PIV equipment

图2 光学组件Fig.2 Optical components

图3 激光片光Fig.3 The sheet of laser
激光源采用脉冲式发射,点源激光通过圆柱形透镜,柱形透镜将激光束在垂直柱形透镜体轴方向上展开形成片光,如图2; 由于激光片光厚度影响测试精度,在圆柱透镜后采用球形透镜为第二透镜用于控制产生的激光片光源的厚度。通过分别改变柱形透镜和球形透镜的焦距,可以得到不同片光源扩散角。本文选用了由柱面镜( FL =-25.4mm) 和球面镜( FL =500mm) 组成的光学组件,将脉冲激光束变为有一定扩张角的片光,使在所测的流场区域片光厚度最薄( <1mm) ,具有较高的能量分布特性,如图3。

图4 激光脉冲时序配合图Fig.4 Timing sequence of laser pulse
如图4 所示,两个脉冲激光片光之间的时间是可调的,通过调整脉冲时间间隔可以对具有不同流速的流场进行选择性测量,确保测试精度。Laser Pulse 同步器是为PIV 设计的可编程延迟的脉冲发生器,可以同步控制激光脉冲,触发CCD 相机的快门,图像传送。计算机通过RS-232 接口控制同步器的触发时序,从而控制整个实验中的硬件工作时序。
1.2 互相关算法处理
对激光图像进行数值分析处理,互相关算法如图5,通过图像上像素点进行坐标定位,设定查问阈大小为16 ×16pixel,在此查问阈下进行互相关处理,得到峰值点位置,测量出峰值点粒子图像在已知时间Δt内的位移ΔX、ΔY,从而求出该点的速度,依次可得到测试流场的速度场。
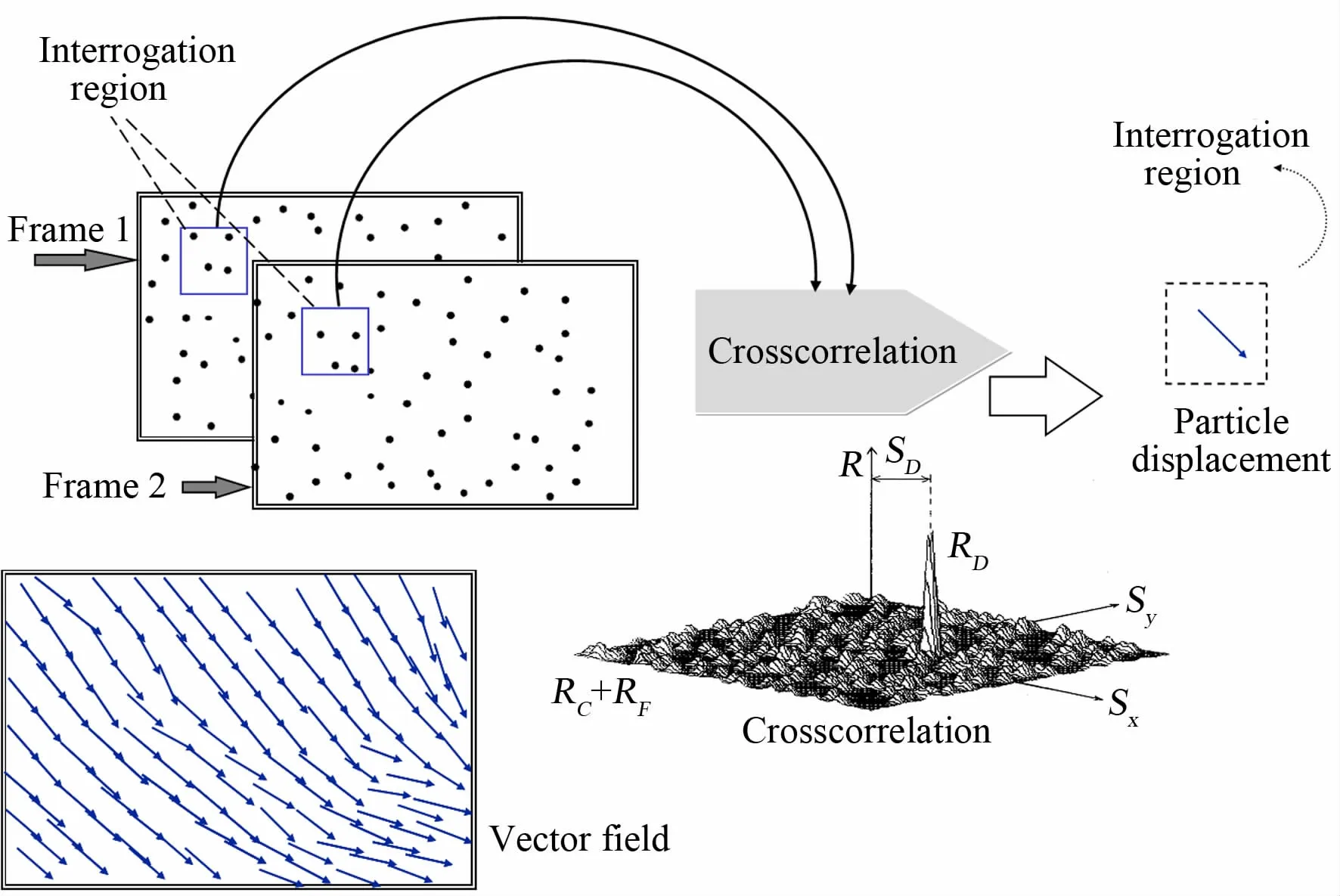
图5 互相关算法示意图Fig.5 Schematic plot of cross-correlation
1.3 激光粒子图像结果
实验在南京航空航天大学低速风洞中进行,通过矩形舵偏角产生翼尖强旋涡,舵面弦长60mm,展长90mm;同时在风洞测试段上游添加示踪粒子( 示踪粒子由甘油三脂挥发,直径20 ~100μm) ,旋涡裹挟粒子一起向下游运动; 在激光片光的照射下,粒子通过米氏散射原理向沿纵轴布置的CCD 高速相机散射光强,相机捕捉到原始图片进行图像处理输出。
舵面偏角为10°、15°,CCD 相机拍摄截面距离矩形舵面后缘分别为1.0d、2.4d、3.0d( d 为舵面弦长,d=60mm) ; 风洞来流速度V =30m/s,雷诺数Re =15000。针对激光波长,采用532nm ±2nm 带通滤波镜,截止外界其它杂散光源进入视场,提高图像信噪比。原始图像经过数据处理呈黑底白点粒子散布图。
在上述试验状态下,CCD 相机拍摄到的舵面旋涡各截面内激光粒子图像如图6 所示:
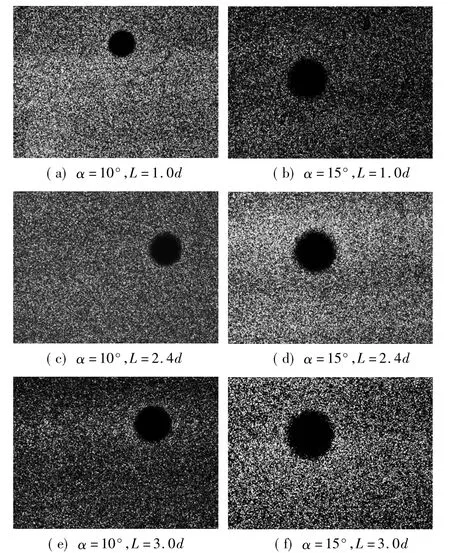
图6 原始激光粒子图像Fig.6 The original pictures of PIV
通过上述原始激光测试手段,可以清晰捕捉到空气中粒子在舵面旋涡流场作用下的分布形式:随着舵面在来流方向产生一个迎角,由于舵面上下气流形成压力差,下表面气流翻卷至上表面,形成典型“翼尖旋涡”效应,大气粒子在旋涡中随着流体高速螺旋运动,部分粒子被甩出旋涡涡核中心,在外围达到平衡、集聚,形成如上图所示的粒子“空洞效果”。
2 MATLAB 图像处理
2.1 粒子图像二值化
为有效地统计大气粒子在流场截面内的具体分布情况,考虑对原始图像进行数字处理。定义矩阵表示平面坐标系上和灰度上都已离散化的图像数据,矩阵的行号i 和列号j 分别表示像素的横坐标和纵坐标,矩阵的相应元素值则表示该像素的灰度值A( i,j) 。
在得到A 矩阵基础上,对图片中每一个像素的灰度值进行二值分类,用新的矩阵B( i,j) 储存分类后的数值。首先,设定一个灰度阈值为Y,当该像素的灰度值不等于Y 时,该像素的灰度值设为0,当该像素灰度值等于Y,该像素灰度值设为1。用公式表示为:
激光粒子图像是一个大小为1024 ×1376 像素的二维矩阵A( i,j) ,而每一个像素的灰度值范围为0 ~4095。因此,可以通过Matlab 对测量结果图片进行读取和操作,可以更直观有效地反映流场中的流动状况。
二值化后粒子图像三维分布云图7 所示。

图7 二值化后粒子分布三维图Fig.7 Three-dimensional pictures of distributing particulate after image binaryzation
由处理后的的三维粒子分布图可以得到,粒子分布在旋涡中心区域是呈中空状的,旋涡核心粒子含量极低;在涡核外围,有一圈粒子集中带,这是因为中心旋涡区域粒子由于离心力作用被甩出分布在涡核周围,造成在涡核中空区域外的“粒子集聚带”。
2.2 涡核粒子浓度分布统计
本文对α=10°迎角状态下,L =1.0d、2.4d、3.0d 3 个截面的图片都进行了二值化处理,在经过二值化处理得到的矩阵B( i,j) 中,选取旋涡附近400 ×400像素的矩形区域作为查询区。并以旋涡中心为原点,划出一个半径为200 像素的圆形区域进行粒子浓度分布统计。将半径为200 像素的圆形区域划分为10个圆环,每个圆环的宽度为20 像素,共有10 个圆环区域。图中黑色部分为涡核,外部亮点代表粒子。查询区及划分后的图片如图8 所示。
图8 中,圆环径向距离为R,R 的取值范围为0 ~200 像素,为了能表示圆环内粒子浓度的分布情况,定义C 为圆环区域内粒子浓度系数( C =圆环内单位像素粒子数/视场中单位像素粒子数) 。C 越大,表明该区域内粒子越集中,C 越小,表明该区域内粒子越分散,则C-R 曲线图可以表示涡核周围粒子浓度沿径向的变化情况。
图9 所示为舵面无迎角情况下PIV 拍摄到的舵面原始流场图像及粒子浓度系数沿经向的分布情况。选取舵面偏角为10°状态,距离矩形舵面后缘分别为1.0d,2.4d,3.0d( d 为舵面弦长,d=60mm) 的3 个截面,进行图像二值化,提取得到粒子浓度分布规律,如图10 所示。

图8 PIV 二值化处理查询区及旋涡圆环划分区域Fig.8 Inquired zone after image binaryzation
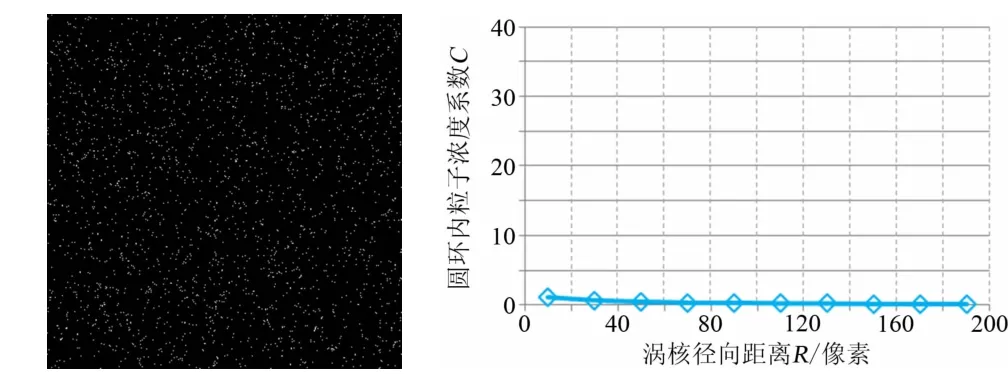
图9 自由流场中,二值化图像及粒子浓度分布Fig.9 The picture of distributing particulate after image binaryzation in free flow
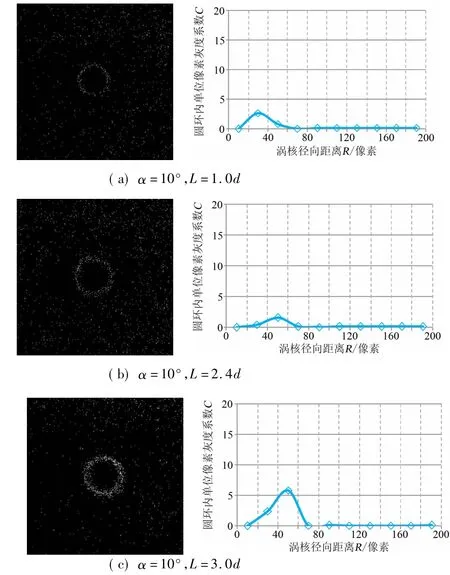
图10 舵面后方3 个截面内粒子浓度分布图像Fig.10 The picutres of distributing particulate in three sections after the rudder
图中横坐标表示距离旋涡中心的距离,单位为像素,纵坐标表示在图8 中查询区域中定义的单位像素灰度系数,由于粒子对激光呈米氏散射,当划分区域内单位像素灰度系数较大,则表明这一区域内粒子浓度较大。由上左图中所示,随着拍摄截面与舵梢间的距离增大,旋涡的半径略有变大,这是旋涡在流体粘性应力作用下,开始出现扩散状态的表现。二值处理后,剔除图像中不必要的杂点,粒子在涡核周围出现的聚集效应十分明显。自由来流条件下,均匀流场中,无量纲粒子浓度系数为Cmax=0.44。
当舵面产生迎角后,旋涡流场中粒子在涡核外围集中汇聚,此时的粒子浓度系数增大,随着拍摄截面距离舵面后缘距离的变化,浓度系数也会发生一定的变化,这一变化是舵面后缘分离涡与翼尖旋涡掺混效果相互影响所致。当舵面迎角α=10°时,L=1.0d 截面内,Cmax=2.7; L =2.4d,Cmax=1.5,当L =3.0d 时粒子的浓度系数上升至Cmax=5.85,此时粒子汇聚程度为自由流场的13.3 倍,在所测试截面中,粒子汇聚程度达到最高。
3 结 论
(1) 本文采用激光粒子图像技术,利用大气中微粒在激光片光下的米氏散射原理,可以有效拍摄到复杂流场结构下粒子光学散射及分布的特性图像,解决了传统环境测试设备无法对复杂条件下流场内粒子分布进行实时测量的缺陷。
(2) 通过建立MATLAB 算法对激光粒子图像进行二次处理,得到二值化后粒子分布的清晰图像,图像直观表明大气粒子在舵面旋涡涡核边缘产生明显的积聚效应,涡核中心粒子呈“空洞”状态。
(3) 舵面迎角10°时,在距离舵面后缘不同距离的截面处,都可以看到大气粒子汇聚形成的激光散射亮带;截面中无量纲最高粒子浓度系数为5.85,相对于自由来流条件下,粒子浓度提高13.3 倍;浓度提高的倍数受粒子所处截面位置、当地舵面迎角等因素影响。
[1] 付培健,王世红,陈长和. 探讨气候变化的新热点: 大气气溶胶的气候效应[J]. 地球科学进展,1998,13:387-392.
[2] 季国良,王尧奇,沈志宝,等. 兰州市区冬季的低空环流[J]. 高原气象,1984,3(2) : 42-50.
[3] 江灏,季国良. 1992 年冬季兰州城市污染大气的辐射状况[J]. 高原气象,1995,14(2) : 151-156.
[4] 王浩,曾理江. 二维及三维流场的光学测量方法[J].光学技术,2001,27: 139-142.
[5] 盛森芝. PIV 技术[R]. 北京大学力学系测试分析室.1992,11.
[6] Reuss D L,et al. Instaneous planar measurements of velocity and large-scale vorticity and strain rate in an engine using particle-image velocimetry[J]. SAE Paper 890616.
[7] 李斌斌,程克明,顾蕴松. 斜出口合成射流激励器非定常流场特性实验研究[J]. 实验流体力学,2008,22(3) : 27-30.
[8] Chow J S,Zilliac G G,Bradshaw P. Mean and turbulence measurements in the near field of a wingtip vortex[J].AIAA Journal,1997,35(10) : 1561-1567.
[9] Baker G R,Barker S J,Bofah K K,et al. Laser anemometer measurements of trailing vortices in water[J]. Journal of Fluid Mechanics,1974,65: 325-336.
[10]Acquin L,Fabre D,Geffroy P,et al. The properties of a transport aircraft wake in the extended near field: An experimental study[J]. AIAA Conference Proceedings,2001-1038.
[11]顾蕴松,程克明,郑新军. 翼尖涡流场特性及其控制[J]. 空气动力学学报,2008,26(4) : 446-451.
[12] Corsiglia V R,Schwind R G,Chigier N A. Rapid scanning,three-dimensional hot-wire anemometer surveys of wingtip vortices[J]. Journal of Aircraft,1973,10( 2) :752-757.
[13]王宝亮,孙志远,王玉祥,等. 激光衍射粒子测试的模块设计[J]. 内燃机学报,2000,18(4) : 426-430.
[14]顾蕴松,李斌斌,程克明.零质量射流激励器内外流动特性的PIV 研究[J]. 实验流体力学,2008,22( 4) :19-22,38.
