改进汽车无人驾驶技术的思考
2014-11-20天津市第四十一中学高二六班杨铂指导教师刘敏
文/天津市第四十一中学高二六班 杨铂 指导教师/刘敏
据权威部门统计,2011年中国的汽车普及率已经达到每千人56辆,几乎是2003年的5倍。面对越来越拥挤的大街小巷和熙熙攘攘的车流,人们愈发关注交通事故引发的自身安全问题。
随着计算机技术被广泛应用于各行各业,为什么不能让更准确、更迅速的计算机代替人类来控制汽车的驾驶呢?本文针对已经日渐成熟的汽车无人驾驶技术,进行相关改进的理性思考。
汽车无人驾驶技术的现状
无人驾驶汽车是一种智能汽车,也可以称之为轮式移动机器人,主要依靠车内以计算机系统为主的智能驾驶仪来实现无人驾驶。清华大学汽车系副研究员王建强将无人驾驶汽车定义为“通过车载传感系统感知道路环境,自动规划行车路线并控制车辆到达预定目标的智能汽车”。它是利用车载传感器来感知车辆周围环境,并根据感知所获得的道路、车辆位置和障碍物信息,控制车辆的转向和速度,从而使车辆能够安全、可靠地在道路上行驶。
法国INRIA公司曾用类似于给巡航导弹制导的全球定位技术,通过触摸屏设定路线,花费十年心血研制出“赛卡博”(Cycab)无人驾驶汽车。德国汉堡一家公司应用先进的激光传感技术(包括激光摄像机、全球定位仪和智能计算机),把无人驾驶汽车变成了现实,可以实现在错综复杂的城市公路系统的中无人驾驶。
2005年,由美国斯坦福大学学生和教师组成的团队设计出了斯坦利机器人汽车,在由美国国防部高级研究计划局(DARPA)举办的第二届“挑战”(Grand Challenge)大赛中夺冠。该车在沙漠中行驶超过132英里(212.43公里),因此赢得了由五角大楼颁发的200万美元奖金。
2011年7月14日我国自主研制的无人驾驶汽车—由国防科技大学自主研制的红旗HQ3无人驾驶汽车,首次完成了从长沙到武汉286公里的高速全程无人驾驶汽车实验,创造了我国自主研制的无人驾驶汽车在复杂交通状况下自主驾驶的新纪录,标志着我国无人驾驶汽车在复杂环境识别、智能行为决策和控制等方面实现了新的技术突破,达到世界先进水平。
目前汽车无人驾驶技术的原理
每年,驾驶员们的疏忽大意都会导致许多交通事故。既然驾驶员失误频出,汽车制造商们当然要集中精力设计能确保汽车安全的系统。“无人”驾驶系统种类繁多,其中有些根本算不上“无人”,还有些活像是科幻小说中的东西。
无人驾驶汽车车顶上装载的扫描器能发射64束激光射线,当激光扫描到车辆周围的物体,会反射回来,从而计算出了汽车与物体之间的距离,如图1。
另一套在底部的系统测量出车辆在三个方向上的加速度、角速度等数据,然后再结合GPS数据计算出车辆的位置。所有这些数据与车载摄像机捕获的图像一起输入计算机,计算机软件以极高的速度处理这些数据,形成一幅三围立体图片,如图2。这样,系统就可以非常迅速的作出判断,决定汽车的行驶方式。
在目前的高端汽车市场上,大多数车辆都已经装载了车用雷达,它可以用来跟踪附近的物体。例如,奔驰的自动巡航控制系统便是一种事故预防系统,它的后保险杠上有一个装置,当它在汽车的盲点内检测到物体时,便会发出警报。奔驰的另一款轿车在挡风玻璃上装载摄像头,它可以通过分析路面和边界线的差别来识别车道标记。如果汽车不小心驶离了车道,方向盘会轻微震动来提醒驾驶者。根据奔驰公司发布的材料,未来的梅赛德斯无人驾驶汽车会在挡风玻璃上装载两个摄像头以实时生成前方路面的三维图像(见图2),检测诸如行人之类的潜在危险,并且预测他们的行动。
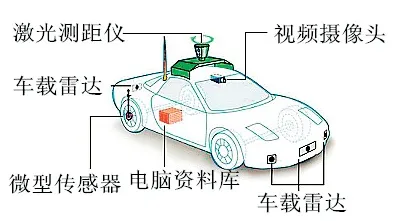
图1 无人驾驶汽车示意图
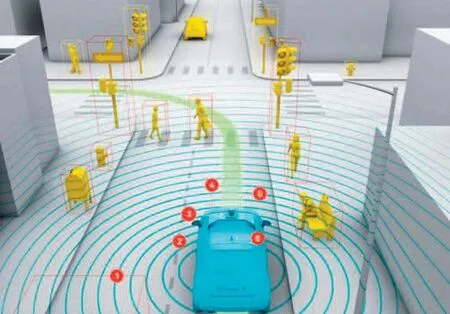
图2 无人驾驶汽车前方路面的三维图像
无人驾驶技术的优缺点
优点:
当人们还在为侧位停车苦苦练习的时候,无人驾驶汽车帮你解决了这一切。在现在这个车位如金的城市中,无人驾驶汽车会为人们节省出很多停车位。大众、雷克萨斯、奥迪车辆上已经基本标配了自动泊车辅助系统,为司机减少了很多麻烦。每个司机都有过疲劳驾驶的时候,这时候,您只需点按一个按钮,车辆便会进入无人驾驶状态。无人驾驶系统会使车辆更加准确地控制供油及刹车,无形间就为车辆节省了汽油,减少了环境污染,运用到电动车辆上,更加绿色环保。
另外,研发无人驾驶汽车的目的只有一个,那就是—安全。根据世界卫生组织的数据,每年全球因道路交通事故死亡的人数超过120万,自动驾驶可以大大减少驾驶人失误造成的安全事故,自动驾驶汽车能够促使更多人共同使用车辆,极大减少汽车的使用,创造“明天的高速公路火车”。这些“高速公路火车”能减少能源消耗,增加主要道路的运力。在节约时间方面,美国交通运输部估计,每一工作日,人们平均花费52分钟在上下班路上。未来,人们可以以更有效率的方式使用这些时间。
缺点:
人们都知道,基于无线网络的计算机会受到无线网络信号强弱的影响,太阳黑子的活动也会对电子设备出现干扰,在隧道里GPS会不能正常使用等等这些情况。
虽然激光传感器能区分出其他车辆、行人、自行车,以及其他大大小小的固定物体,而且不会发出肉眼可见的光线,但是它仍然需要雷达协助它探测远处的高速移动物体。安装在车前的摄像头可以帮助系统观测道路指示牌和交通灯,并把信息传达给车载电脑进行处理作出相应的动作。
可以想象,这一整套系统的编程会有多么繁琐,比如换道的算法,没有交通灯时的路口会车等等复杂驾驶动作。以后者为例,无人驾驶汽车会先靠右停下来,观察对方行动,如果对方没有动作,它就往前挪一点点,再看对方反应,如果还不动,那它才会开始转向。越繁琐的程序,就会越容易出现计算错误,造成无法逆转的悲剧。然而,最最主要的问题是:造价过高!
对汽车无人驾驶技术提出的改进建议
1.现在的无人驾驶技术只能选择一条路线行进,无法根据道路拥挤情况做出路线的实时最优选择。由于目前3G网络与4G网络已经广泛应用,建议可以从车内地图导航系统快速获取前往目的地之间的道路拥挤情况,选择最佳路线前往目的地。
2.雷达、激光测距仪和摄像头只能检测到车身周围近距离物体的变化,无法根据前方车辆所处位置做出最佳的变道选择。建议通过数据网络、WIFI、GPS三大设备同时处理,准确定位车辆信息。若每一辆车都配备这一套设备,并通过网络进行信息交换,就可以更加准确地得知前方车辆的具体位置、方向、车速以及加速度,从而使车辆做出最优的超车方案。
3.目前的计算机无法分辨出行人、障碍物以及行驶车辆。可以做一个假设:在你的前方有一个突然打滑的车辆,你的左边是一辆大货车,右边是一群小孩,那么现在的无人驾驶车辆会选择撞向小孩,因为阻力较小。而有经验的司机都会减慢车速撞上大货车,这是一个道德观念问题。而作为计算机,既没有道德也没有情感。现在的技术还无法使计算机更加准确的做出判断,需要做出长时间的实验来完成改进。
4.无人驾驶汽车只停留在规定路线后沿路线前进,我的想法是通过摄像头对周围进行三维扫描,并通过语音时时改变行车路线。并可以通过语音控制汽车的车速、变道、超车及转弯等一切功能。
可以看出来,以现在的科技水平人们对无人驾驶技术处于完全不放心的态度。但是我相信,随着科技的发展和时代的进步,这一态度将会有所改变。
