基于巨磁阻传感器的无线船舶航向自动测量系统研究
2014-11-10张玥,陆瑛
张 玥, 陆 瑛
(1.上海船舶运输科学研究所,上海200135;2.上海海事大学,上海201306)
0 引 言
航向自动测量设备是船舶重要的助航设备,包括电罗经、磁罗经及GPS等设备。目前,新材料、新技术的不断涌现,为研究更先进的船用航向自动测量技术带来了机遇。
巨磁阻材料的磁电阻变化率高达50%,远远超过一般铁磁材料,因此利用巨磁阻材料作为船用航向自动测量系统的传感器,可以提高航向测量精度。将其与加速度传感器、陀螺传感器、温度处理模块、微处理器等结合起来,组成船用航向自动测量系统。在测量系统与驾驶室等舱室之间采用Zigbee协议的无线数据通信,可以扩大传输范围,便于安装使用。
1 巨磁阻效应
巨磁阻效应是因金属多层膜中电子自旋相关散射产生的,由于载流电子具有上旋和下旋两种电子,属于不同自旋状态的电子与磁场产生的作用不同,因此会产生不同的电阻值变化。巨磁阻效应可利用二流体模型进行解释(见图1)。
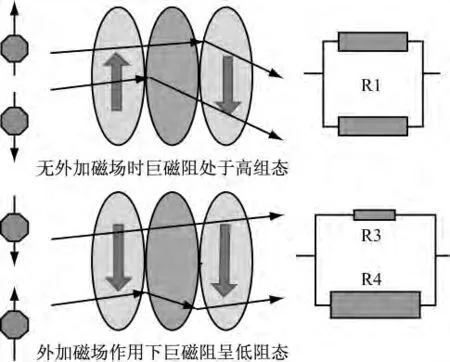
图1 巨磁阻效应原理
巨磁阻材料一般为“三明治”结构。图1中的铁磁材料存在自旋向上和自旋向下的电子,当自旋电子的磁矩方向与所在铁磁材料的磁化方向平行时,传导电子所受的散射小,因而电阻率低。当磁性多层膜相邻磁层的磁矩反铁磁耦合时,自旋向上、向下的传导电子在传输过程中分别接受周期性的强、弱散射,因而均表现为高阻态R1;当多层膜中的相邻磁层在外加磁场作用下趋于平行时,自旋向上的传导电子受到较弱的散射作用,构成了低阻通道R3;而自旋向下的传导电子因受强烈的双重散射作用形成高阻通道R2,因为有一半电子处于低阻通道,所以此时的磁性多层膜表现为低阻状态。
2 航向自动测量系统
2.1 航向自动测量数学模型
地磁场是地球固有的特性,为捷联载体导航提供了天然的坐标系,需要通过坐标变换建立地磁坐标系和载体坐标系间的关系模型。定义测量系统所在的船舶三轴坐标系为oxyz,ox轴指向船舶行驶方向的右侧,oy轴指向船舶行驶方向,oz轴指向船舶正下方;在船舶坐标系下,巨磁阻传感器每个轴上的磁场输出值,用h(t)L=[h(t)xh(t)yh(t)z]LT表 示,陀螺传感器的每个轴上的角速度值用ω(t)L=[ω(t)xω(t)yω(t)z]LT表示,加速度传感器的每个轴上的加速度值用a(t)L=[a(t)xa(t)ya(t)z]LT表示。同时,定义地磁场所在的地球坐标系为OXYZ,OX水平向东,OY水平向北,OZ指向地心,在地球坐标系下巨磁阻传感器每个轴上的磁场值用h(t)G=[h(t)xh(t)yh(t)z]GT表示。
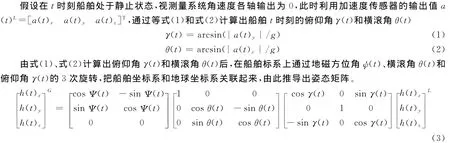
通过式(3),将载体坐标系下的三轴磁场值转换到地磁坐标系下三轴磁场值

可以推出静态条件下,地磁方位角的数学模型

在船舶动态运行中,需要考虑船舶坐标系上陀螺传感器输出的角速度,根据ω(t)L=[ω(t)xω(t)yω(t)z]LT对上述计算结果进行适当的修正。
2.2 航向自动测量系统设计
由数学模型可知,要进行船舶航向自动测量,需测量并计算地磁场的三轴磁场分量、横滚角和俯仰角,动态测量中还需要船舶三个轴向上的角速度信息。由此构建的船舶航向自动测量系统的硬件框图见图2。
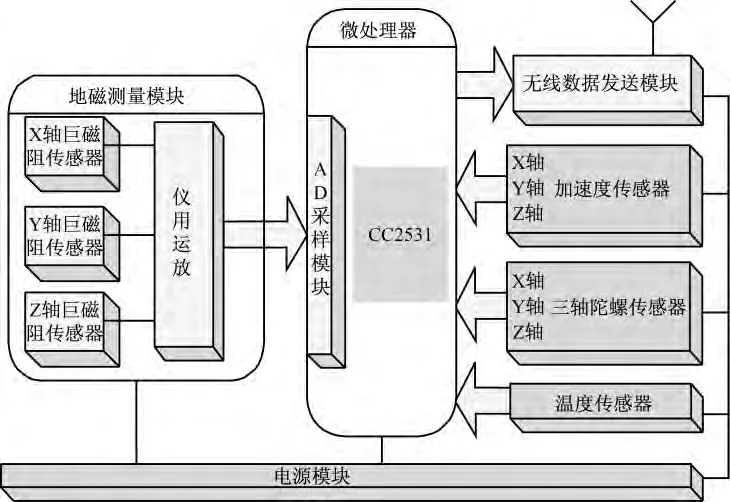
图2 系统测量原理框图
图2 中,巨磁阻传感器分别测量船舶坐标系下的三轴地磁分量,加速度传感器分别测量船舶坐标系下的三轴加速度分量,陀螺传感器分别测量船舶坐标系下的三轴角速度分量。由于上述巨磁阻传感器对温度较敏感,为补偿温度对测量的影响,采用温度传感器测量环境温度的变化。同时,针对航向测量模块中磁场测量单元易受环境电磁场影响的问题,在测量模块与船舶控制室之间采用基于Zigbee协议的无线数据收发模块进行通信。因此航向测量模块可以安装于船舶电磁场干扰较少的位置,以达到提高测量精度的目的。
根据测量需求,选择三轴加速度传感器ADXL345作为加速度测量传感器,选择三轴陀螺传感器L3 G4200D作为角速度测量传感器,选用DS18B20单线数字式传感器,选用具有无线射频功能的CC2531芯片作为核心处理芯片。巨磁阻传感器选用灵敏度较高的AAHH002-02巨磁阻传感器,由于其输出信号只有mV级,需采用INA118仪用放大器对其进行放大处理,由可变电阻来调节运放的增益。此外,巨磁阻传感器AA H H002-02是单极性传感器,无法判断磁场方向,此处通过添加偏置磁场的方法,实现巨磁阻传感器的双极性测量。
船舶航向自动测量系统的算法流程见图3。
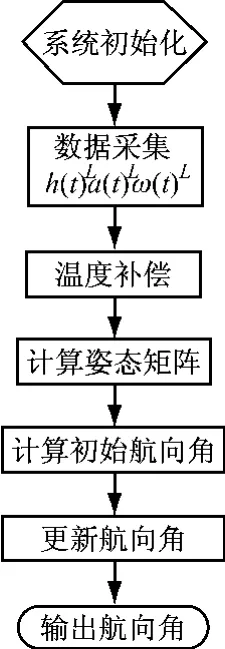
图3 航向算法流程图
3 误差补偿研究
船舶航向自动测量系统中,巨磁阻传感器虽然灵敏度很高,但是其对环境温度的变化敏感,测量中容易出现误差。因此,为提高磁方位角的测量准确度,必须进行相应的补偿[7]。考虑到硬件补偿的实现难度,采用软件对巨磁阻传感器的零点温漂进行补偿。软件补偿主要有数值分析法和人工智能法等,此处采用最小二乘法和BP神经网络两种方法对巨磁阻传感器的零点温漂进行补偿。
温度补偿实验中,首先将整个测量系统和高精度高斯计固定在一起,并放置于三轴转台上,使高斯计探头和巨磁阻传感器X轴尽量平行,然后将整个装置放入温箱中。通过调整三轴转台,使高斯计的读数达到最小,确定此位置为巨磁阻传感器X轴的零点。实验中,温箱从-20°C~70°C进行编程后连续运行,以10°C为间隔共经历10个步骤,每个步骤稳定运行20 min,记录的巨磁阻传感器的输出数据见表1。

表1 巨磁阻传感器零点温漂实验数据表
通过最小二乘三次拟合算法补偿之后,得到巨磁阻传感器的零点输出补偿数据(见表2),得到的最小二乘补偿方程见式(8),仿真曲线见图4。

式(8)中:T为温度值;V0(T)是当温度值为T时的零点电压值。

图4 最小二乘三次拟合补偿图

表2 巨磁阻传感器零点温漂最小二乘补偿表
设置BP神经网络中的温度值为输入层节点,零点电压为输出层节点,隐层节点为5个,学习效率为0.1,训练目标精度为1×10-5,通过24次迭代训练之后得到补偿网络。通过BP神经网络算法补偿后,巨磁阻传感器的零点输出补偿数据见表3,仿真曲线见图5。
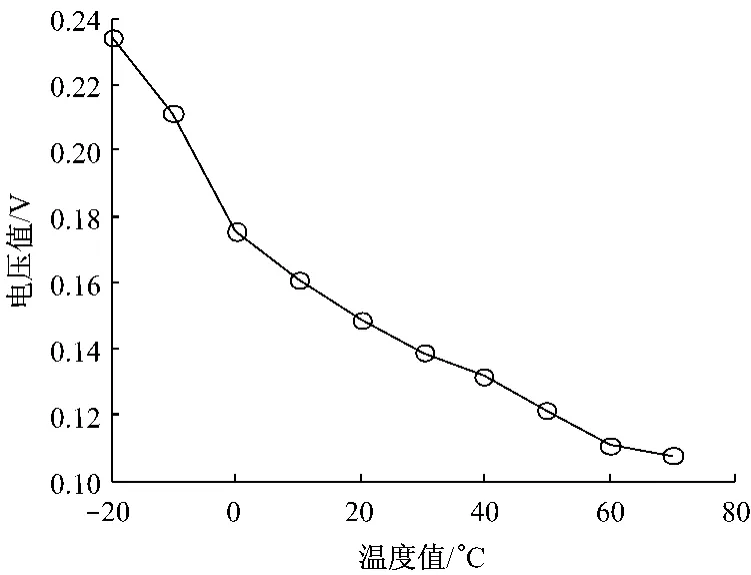
图5 BP神经网络补偿图

表3 巨磁阻传感器零点温漂BP神经网络补偿表
补偿前的巨磁阻传感器零点输出数据与通过最小二乘补偿算法和BP神经网络补偿算法补偿后得到的巨磁阻传感器零点数据的对比见图6。从图6中可以看出,通过最小二乘算法补偿后,巨磁阻传感器的零点温漂误差由补偿前的18.36%降至4.73%;通过BP神经网络算法补偿后,巨磁阻传感器的零点温漂误差由补偿前的18.36%降至0.56%。综上所述,将BP神经网络补偿算法应用于系统中巨磁阻传感器的零点温漂补偿能取得更为理想的补偿效果。
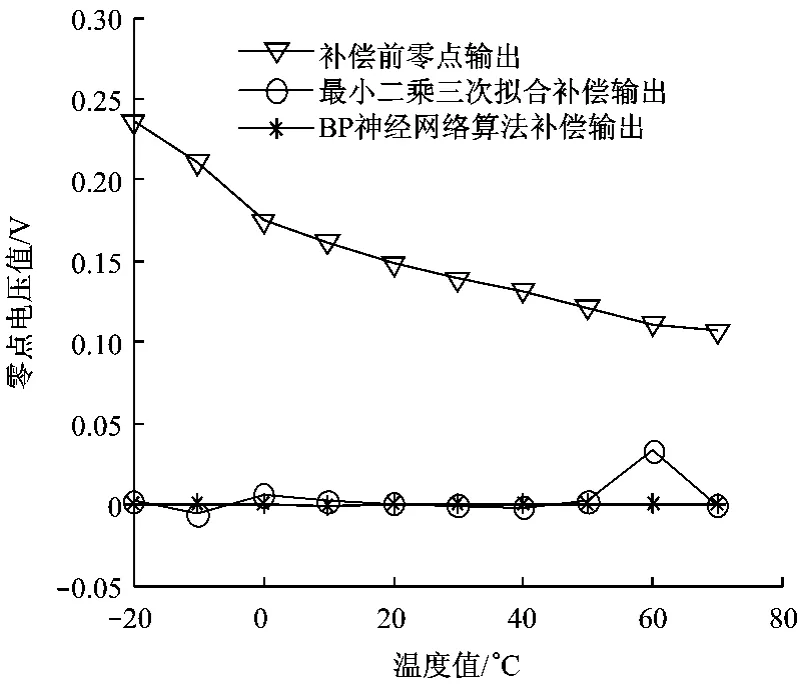
图6 巨磁阻传感器零点温漂补偿效果图
5 结 语
船舶航向自动测量是船舶导航定位中的重要环节,围绕现阶段船舶航向自动测量中存在的航向误差易随时间积累、航向测量易受环境影响等问题,提出了航向计算数学模型。对船舶航向自动测量系统的硬件设计和系统测量流程进行了研究,提出了基于高磁电阻率的巨磁阻传感器船舶航向自动测量系统。对航向自动测量系统中地磁测量单元进行温度补偿研究,将巨磁阻传感器的零点温漂误差由补偿前的18.36%降至0.56%。所提出的船舶航向自动测量系统为基于地磁场的船舶导航定位系统的研究提供了基础。
[1] 郭小俊,谈黎洲.电子罗盘在水下拖体的应用[J].上海船舶运输科学研究所学报,2013,36(1):62-65.
[2] 曹文.基于磁阻传感器的地磁信号检测[D].中国优秀硕士学位论文全文数据库,2007.
[3] 周军,葛致磊,施桂国,等.地磁导航发展与关键技术[J].宇航学报,2008,29(5):1467-1472.
[4] Zheng Xueli,Fu Jingqi.Error Compensation of Magnetic Measurement System Based on GMR Sensor[J].Control and Decision Conference,2013(5):2018-2022.
[5] 钱政.巨磁电阻效应的研究与应用[J].传感技术学报,2003(4):516-520.
[6] Hua Sun,Peike Yang.Design and Research on Err ors Co mpensation of Digital Co mpass[D].Inter national Conference on Mechatronics and Auto mation,2009.
[7] Zheng Xueli,Fu Jingqi.Perfor mance Compensation of GMR-based Magnetic Azimuth Measurement System[C].Control and Decision Conference,2012.
