动态目标识别中的实时复杂巡航场景运动检测
2014-11-09武治国李桂菊
武治国,李桂菊
(中国科学院 长春光学精密机械与物理研究所,吉林 长春 130033)
1 引 言
运动目标检测在工业控制、生物医学、交通监控、安防、天文观测等领域有着广泛的应用。因此,一直以来是图像处理领域的重要研究热点。在应用中根据被检测的场景与摄像机之间是否存在相对运动,而分为静止背景和运动背景两类。对于复杂的巡航场景的目标探测,相对于只存在目标运动的静止背景或者背景只发生微小变化的动态目标检测,由于目标与背景物体融合在一起并且二者都处于运动中,大大地增加了运动目标检测和识别的复杂度。
针对复杂巡航场景目标检测的工程应用,通常需要补偿背景图像与当前图像的全局运动,计算图像间的位置偏移,将巡航场景目标检测问题转化为静止背景识别问题。比较简单的方式是通过摄像机的实时旋转运动参数计算图像的位置偏移,但是由于摄像机曝光时刻以及摄像机抖动等所造成的影响,无法准确计算出图像的运动偏移量。因此需要结合图像间的信息实现场景的运动估计。模板匹配方法,实时性高,但具有抗噪声、抗干扰能力比较差的局限性[1-5]。SIFT 算子,Harris角点检测算子等特征提取方法具有能够适应环境光照变化等优点,但计算代价较大,运算时间较长。C Kuglin,D Hines采用傅立叶变换的相位相关法进行背景运动补偿,由于其边界效应会影响图像的交叉能量谱,从而降低偏移量估计的精度,同时计算复杂无法满足工程上的实时性应用要求。
为了避免以上方法存在的问题,本文根据图像边缘信息具有抗光照变化,抗干扰能力强的性质,计算背景图像与当前帧图像间边缘位置互相关性,检测出两幅图像之间的平移量,估计运动参数,从而实现实时准确的场景运动检测。
2 巡航场景运动检测
2.1 场景边缘提取
图像的边缘是具有不同灰度的区域的边界,它反映了灰度的阶越变化,是图像灰度的急剧变化区域,包含着场景中有价值的边界信息,是图像分析的重要依据。Sobel算子能够平滑噪声,对噪声具有抑制能力,同时它计算方法简单,有利于实时处理的应用要求。因此本文采用Sobel算子对背景和当前图像进行卷积处理,提取边缘。
Sobel算子是基于一阶微分的边缘检测方法,本文采用如下x和y方向的窗口算子。
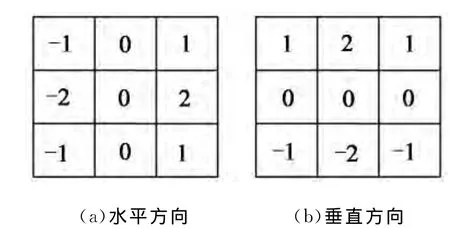
图1 Sobel窗口算子Fig.1 Sobel window operator
2.2 待检测模型选取
为了检测背景帧图像相对于当前帧图像的偏移量,通常采用方法是在背景帧图像和当前帧图像中计算匹配点或匹配块,根据匹配的位置差异计算帧间偏移量。
如果背景图像中的特征信息不足,场景较单一或存在较多干扰。这样就造成浪费大量的处理时间,甚至场景运动检测失效。因此配准模型应该选取图像中信息丰富的部分。局部熵刻画了图像中局部区域变化的剧烈程度。局部熵反映了边缘图像的离散程度,在局部熵大的地方,边缘图像相对均匀;局部熵小的地方,边缘图像离散性越大。
设F(i,j)为边缘图像中点(i,j)处的灰度值,对于M×N的局部窗口,局部熵为:
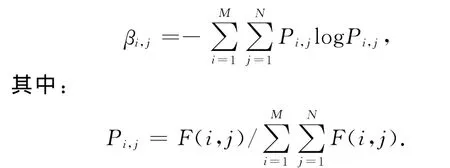
βi,j反映了边缘图像窗口内的灰度变化率大小。在边缘图像中相对较均匀的地方,局部熵就大,βi,j的值也越大;边缘图像相差较大的地方,局部熵小。
局部熵计算涉及到对数运算,计算工作量大运行速度慢。可由泰勒展开舍去高次项,得到近似计算公式:

本文将背景帧边缘图像分成N块,计算每块的局部熵,选取局部熵最小的M块边缘图像作为配准模型。这样既减小匹配计算量,同时又提高运动矢量检测准确性。
2.3 配准模型计算
图像配准是将图像中的场景稳定在同一帧图像的相同位置上,即计算当前帧相对背景帧来说在X方向和Y方向上各运动了多少像素,然后根据偏移量移动当前帧图像与前一帧配准。
由于背景帧中选取的配准模型可能在当前帧图像中包含运动目标,但一般情况下,运动目标与场景相比只占图像的小部分区域,如果考虑匹配的图像中局部熵块的运动矢量,无目标块的矢量应该具有一致性,也就是说大部分块运动矢量的长度应该相等,相关性强,而当前图像中含有目标的块的相关性差。
2.4 巡航场景运动估计
两幅图像之间的匹配是通过将模板图像与待匹配图像进行相关运算,得到一个相似度,根据相似度的大小就可以判断二者是否匹配。当二者匹配时,可以得到模板图像在待匹配图像中的位置。边缘的场景图像与当前帧图像的相似度计算公式为:


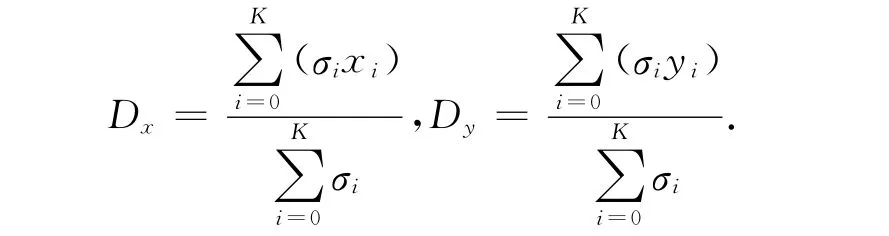
为了消除匹配的误差及运动目标的干扰,对M块背景模板边缘图像分别计算运动矢量,统计其直方图分布,滤除奇异值。对剩余的K块模版计算所得的运动矢量,根据它们的相似度分别计算x方向和y方向的位移矢量。
取得场景运动矢量后,动态目标检测便可根据运动矢量,补偿当前帧图像。对背景图像和补偿后的图像,采用差分运算消除场景图像,提取前景运动目标。
3 实验结果与分析
为了验证算法的有效性和实时性,以PC机(Pentium 4CPU 2.8GHz,2GB内存)做为实验平台,对上述算法进行仿真,测试效果分别如图所示。
(1)实验一 山林中放火的长波红外数字图像
实验图像分辨率为320×256,14位灰度级。红外图像如图2所示。图像中背景图像和当前帧图像位置发生偏移,火点位置火焰面积和亮度发生变化。
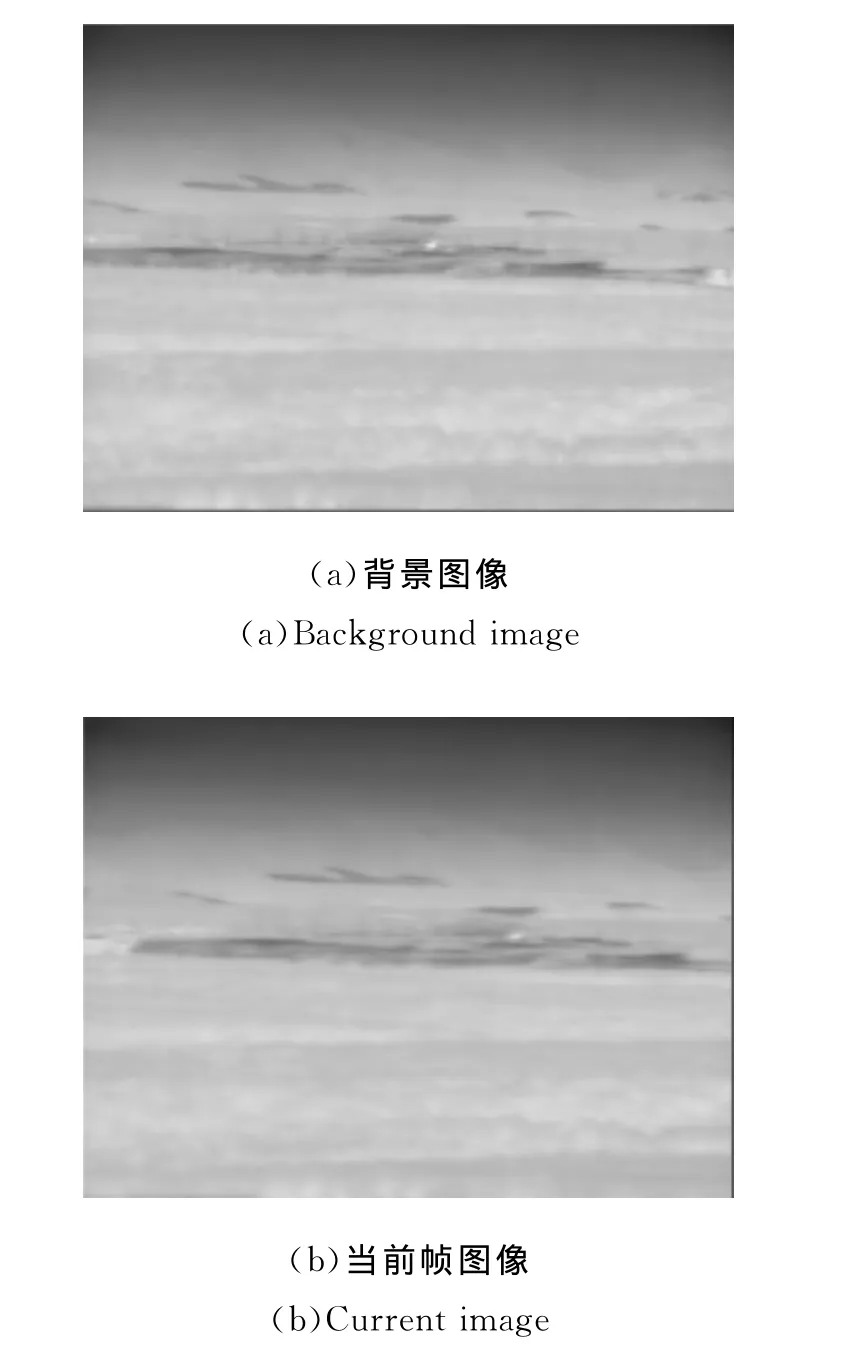

图2 红外实验图像Fig.2 Infrared images experiment
图2(d)为本文方法场景运动补偿后,背景图像与当前帧补偿后图像相减并二值化后的结果。算法耗时13ms,完全满足工程中红外图像50frame/s的实时图像处理要求。检测结果为x方向运动41个像素,y方向运动3个像素。结果中可以看出背景图像已经背完全剔除,只剩下发生变化的火点。而图像(e)为背景图像与当前帧图像直接相减并二值化后的结果,图像中包含大量的山脉及林木背景。
(2)实验二 林区中烟雾的可见光模拟图像
实验图像如图3所示,分辨率为768×576,8位灰度级。可以看到两幅图像中烟雾发生明显变化,在图像上包含大量镜头上的脏点所成的像,这对场景运动估计造成很大影响。

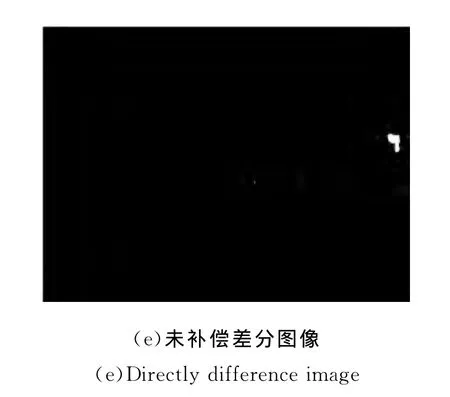
图3 可见光实验图像Fig.3 Visible image experiment
图3(d)为本文方法场景运动补偿后,背景图像与当前帧补偿后图像相减并二值化后的结果。算法耗时24ms,低于模拟视频图像25frame/s的采集频率。检测结果为x方向运动11个像素,y方向运动2个像素。差分结果图像只检测出了发生变化的动态烟雾目标。而图3(e)为中不仅包含了烟雾,而且含有背景中物体,对运动目标识别造成严重影响。
4 结 论
在复杂运动场景中的动态目标识别检测的工程应用中,通常需要首先检测计算出背景图像的运动,再依据目标的特征来识别目标。为了满足处理速度实时并保证目标检测准确有效的需要,本文首先对背景及当前帧图像提取边缘图像,根据背景边缘图像中不同分块的局部熵,合理选取配准模型,进而通过计算与当前帧边缘图像的相关性,实现当前帧图像相对于背景的运动估计。通过红外与可见光图像的实验,结果表明本文方法实时准确的检测出了当前帧与背景之间的运动偏移,通过背景与补偿后的图像有效的计算出了当前帧中的运动变化目标,是一种非常适合于工程中应用的场景运动检测技术。
[1]刘文萍,贺娜.一种新的背景减运动目标检测方法[J].计算机工程与应用,2011,47(22):175-179.LIU W P,HE N.Moving object detection method based on background subtraction [J].Computer Engineering and Applications,2011,47(22):175-179.(in Chinese)
[2]梅跃松,于剑桥,陈曦.移动背景下的运动目标跟踪[J].红外与激光工程,2011,40(4):757-761.Mei Y S,Yu J Q,Chen X.Moving object tracking in the moving background[J].Infrared and Laser Engineering,2011,40(4):757-761.(in Chinese)
[3]Guan Y P.Spatio-temporal motion-based foreground segmentation and shadow suppression [C].Proceedings of Computer Vision,2010:50-60.
[4]Hafiz F.Foreground segmentation-based human detection with shadow removal[C].Proceedings of International Conference on Computer and Communication Engineering,2010:1-6.
[5]Bayona A.Stationary foreground detection using background sub-traction and temporal difference in video surveillance[C].Proceedings of the 17th IEEE International Conference on Image Processing,2010:4657-4660.
[6]Huang M.A study of moving object detection based on combining background profile difference algorithm [C].Proceedings of the 2nd International Conference on Industrial and Information Systems,2010:425-428.
[7]吴本涛,吴敏渊,曾霖.自适应搜索的快速分块跟踪[J].光学精密工程,2011,19(3):703-708.Wu B T,Wu M Y,Zeng L.Fast fragment based tracking using adaptive search [J].Optics and Precision Engineering,2011,19(3):703-708.(in Chinese)
[8]侯晴宇,张伟,武春风,等.改进的均值移位红外目标跟踪[J].光学精密工程,2010,18(3):764-770.Hou Q Y,Zhang W,Wu C F,et al.Improved mean-shift based IR target tracking algorithm [J].Optics and Precision Engineering,2010,18(3):764-770.(in Chinese)
[9]吴君钦,刘昊,罗勇.静态背景下的运动目标检测算法[J].液晶与显示,2012,27(5):682-685.Wu J Q,LIU H,Luo Y.Algorithm of moving object detection in static background[J].Chinese Journal of LiquidCrystals and Displays,2012,27(5):682-685.(in Chinese)
[10]孙辉.相位相关技术实现离焦模糊图像运动估计[J].液晶与显示,2012,27(2):223-228.Sun H.Estimation of displacement for out-of-focus blurred image using phase-only correlation[J].Chinese Journal of Liquid Crystals and Displays,2012,27(2):223-228.(in Chinese)
[11]卢官明,谢双.自适应背景更新及运动目标检测算法[J].南京邮电大学学报:自然科学版,2013,33(3):12-17.Lu G M,Xie S.Adaptive background update and moving object detection[J].Journal of Nanjing University of Posts and Telecommunications :Natural Science,2013,33(3):12-17.(in Chinese)
[12]Denman S,Fookes C,Sridharan S.Improved simultaneous computation of motion detection and optical flow for object tracking[C].Proceedings of Digital Image Computing:Techniques and Applications,2009:175-182.
[13]Xiao B X.Moving object detection and recognition based on the frame difference algorithm and moment invariant features[C].Proceedings of the 27th Chinese Control Conference,2008:578-581.