悬臂式掘进机恒功率变频调速控制器的设计
2014-11-07赵振民刘若涵
赵振民, 刘若涵, 赵 杰
(黑龙江科技大学电气与控制工程学院,哈尔滨150022)
悬臂式掘进机恒功率变频调速控制器的设计
赵振民, 刘若涵, 赵 杰
(黑龙江科技大学电气与控制工程学院,哈尔滨150022)
针对悬臂式掘进机在矿井掘进时情况复杂和负载变化较大的特点,采用高度非线性识别能力的神经网络与遗传算法相融合的方法,实现悬臂式掘进机恒功率变频调速系统的控制。该方法运用遗传算法训练BP神经网络的连接权系数,改进网络性能,提高学习效率,根据系统电流的实际情况对掘进机进行变频调速控制,利用MATLAB/Simulink软件对系统进行仿真分析。结果表明:该方法所设计的以DSP为控制核心的掘进机恒功率调速控制器具有一定的学习和适应能力,能根据电流变化自动调整电机的转速,实现了掘进机恒功率变频调速,提高了掘进机的工作效率和系统的稳定性。
掘进机;DSP;神经网络;遗传算法;恒功率
对于挖掘强度不同的岩层掘进机具有独特功能和灵活性,因此被广泛地应用于地下采矿和隧道的挖掘。掘进机主要进行巷道的掘进,与全断面掘进机相比,悬臂式掘进机具有以下优点:操作灵活,可根据需要截割出任意的形状;装载方便,易于维修和保养;经济效益好,可重复使用性高[1]。随着科技的不断进步和社会发展的需要,要求掘进机加大截割断面的准确性,遇到煤层、岩层和煤岩混合层时能够快速有效地调整截割速度,以提高生产效率,降低生产成本,提高竞争力和安全性,以及减少人员的数量。掘进机截割速度和牵引速度是掘进机的两个重要参数,截割速度和牵引速度合理的匹配对掘进机的工作效率有很大的影响。
针对悬臂式掘进机的工作特点,提出一种基于遗传算法与神经网络的智能控制方法,用于控制电机的转速,使牵引速度随着截割转速的变化进行实时地调整,通过采集检测截割电机的电流来控制转速和牵引速度,实现最佳的掘进效果。采用变频调速的恒功率控制系统可实现掘进机的自动化控制[2]。
1 控制器结构
悬臂式掘进机恒功率变频调速控制器总体结构如图1所示。

图1 恒功率变频调速控制器的结构Fig.1 Structure of constant power variable frequency speed controller
由图1可以看出,控制系统主要由三个模块组成。
一是数据采集检测模块:包括各类传感器(瓦斯传感器、温度传感器、油位传感器、加速度传感器、电流传感器、转速传感器、振动传感器、角度传感器和位移传感器等),电流采集检测装置,故障检测装置及相关的输入接口电路等,主要把所采集到电机的电流、转速信号传送给DSP。
二是数据处理控制模块:主要以DSP为智能控制部件,把采集检测电流的信号与DSP的给定值进行比较和计算,通过神经网络与遗传算法进行训练和优化,最后输出控制信号给变频装置。主要完成掘进机的自检、报警、截割电机的运行和保护,并对相应的故障进行监控。
三是输出执行模块:主要包括变频装置、电机、截割机构及输出接口等电路。根据DSP控制器输出的控制信号,经变频装置来调整牵引速度,用于实现掘进机恒功率变频调速,使转速随煤岩负载变化自动调整[3-4]。
2 控制器设计
2.1BP神经网络
BP神经网络是一种单向传播的多层前向网络,其结构如图2所示。网络拓扑结构包括输入层,一个或多个隐含层和输出层,同层节点没有任何耦合。图2中,输入节点x1,x2,…,xn-1,xn为系统的检测量,输出节点y1,y2,…,yn-1,yn为系统的期望输出量。

图2 BP神经网络结构Fig.2 BP neural network structure
BP神经网络有以下四个基本特点:第一并行性。其各个神经元都能独立地接受信息输入,并通过各自的内在函数处理信息,输出其需要的信息,计算能力快,使它有可能用于实时快速处理大量数据信息,提高了辨识效率。第二极强的容错性和鲁棒性。神经网络的信息分布特性,经过训练的神经网络具有强大的联想能力。从而保证了即使有偏离较大的特征值,神经网络也能辨识出来。第三非线性。神经网络可有效地实现输入空间到输出空间的非线性映射。对无模型的非线性系统,神经网络都能很好地模拟,为工程领域的非线性问题解决提供了有效的手段。第四自适应性和自学习性。经过训练可以自动调整其网络的结构参数,当系统出现不确定的变化时,可自动按一定规则调整网络的参数,得到期望的输出。
BP神经网络的训练基本步骤:
(1)建立BP神经网络结构(三层网络结构),提取输入输出样本,进行网络结构优化。根据输入数据的特点和系统需要的结果,分别确定输入层和输出层的节点数。
(2)计算误差,确定网络的实际输出与期望输出的误差。
(3)权值学习修正,改变网络中所有连接权值,使其输出更加接近期望的输出,直到满足允许误差。
(4)输入样本进行训练,直到满足精度。
由于BP网络在处理具体问题时还存在网络的麻痹现象、网络学习收敛速度比较慢、易陷入局部极小值等问题。为解决BP神经网络训练上的缺点,提出了多种改进方法。
2.2遗传算法
遗传算法是一种自然选择、竞争和群体遗传机理的全局优化方法,具体步骤:
(1)染色体编码。采用固定长度的二进制符号串编码形式。
(2)适应度函数选择。将染色体上表示的各权值分配到给定的网络中,网络以训练样本为输入输出。
(3)种群的初始化。初始群体的创建依赖于求解问题的性质及编码方案的选择。适当选取字符串的长度和群体的规模,可加速搜索速度。
(4)确定遗传算子。采用了选择、交叉和变异算子。
①选择算子。文中选用轮盘赌法。从群体中选择适应度大的优胜劣汰。
②交叉算子。采用算术交叉法,通过父代染色体的选择经交叉操作产生新的染色体,把优良品质得到尽可能的遗传和继承。
③变异算子。采用自适应变异操作,使得变异根据解的质量自适应调整搜索范围,明显提高遗传算法的搜索能力。
(5)确定遗传算法的四个运行参数。群体大小、遗传运算的终止进化代数、交叉概率和变异概率,对求解结果和效率均有影响。
2.3神经网络遗传算法
在控制算法上,针对神经网络控制器的不足,采用遗传算法以进化的方式对其进行优化,从而完成控制器的自适应调整,提高全局搜索能力[5]。神经网络-遗传算法程序流程如图3所示。遗传算法主要通过选择、交叉和变异的方法来加强局部搜索能力;面对大量的优化变量时,采用实数编码提高速度,使控制器实时性得到提高。遗传算法优化的神经网络控制器,一方面采用遗传算法获得网络的节点连接和权值分布情况;另一方面,神经网络控制器会通过输出反馈进行性能评价,对遗传算法进行调整。
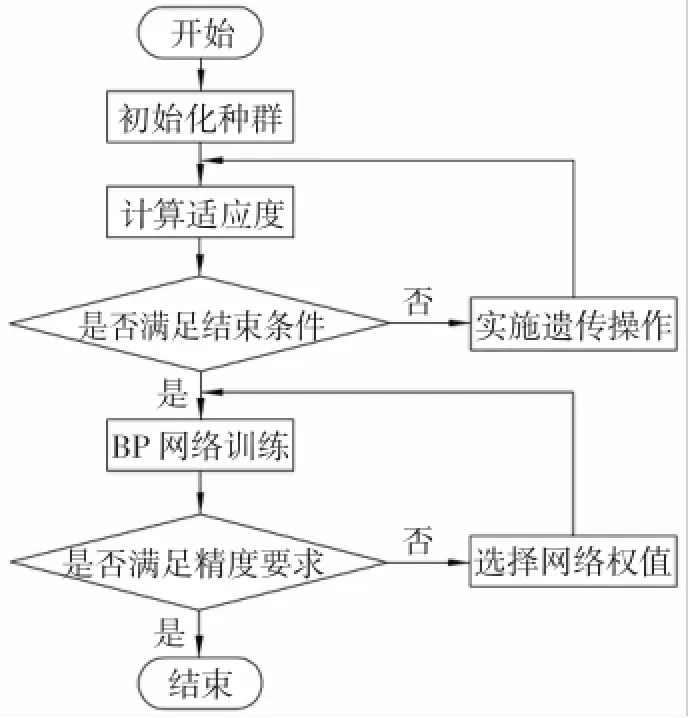
图3 神经网络-遗传算法程序流程Fig.3 Neural network-genetic algorithm program flow
系统开始运行时,神经网络控制参数先初始化种群,而后计算种群的适应度,根据计算结果判断是否满足条件,若满足条件则把结果作为神经网络的初始权值;若不满足条件,则采用遗传算法对种群进行优化,再进行判断。选好网络的初始权值后,应用神经网络控制器进行计算和优化。适应度函数是神经网络的评价标准,其直接影响控制效果的好坏,所以必须先确定好由目标函数值到个体适应度之间的转换规则,从而得到好的处理方法[6]。
3 仿真结果与分析
为了验证所设计的神经网络与遗传算法控制器在悬臂式掘进机恒功率变频调速系统的应用效果,根据悬臂式掘进机的工作特点构建了基于MATLAB/Simulink的恒功率变频调速系统的仿真模型。以阶跃相应的电流信号作为输入,观察其扰动对信号的影响情况。仿真曲线如图4和图5所示。图4的扰动信号是模拟截割煤岩硬度较大时电流,图5的扰动信号是模拟截割硬度较小时的电流,对系统的动态和稳态进行分析。仿真分析表明,图4截割煤岩突然变硬时,使电机负载变大,电流增加,通过智能控制器对电机电流进行快速调节,从而降低转速,实现恒功率控制。图5截割煤岩突然变软时,使电机负载变小,电流减少,通过智能控制器对电机电流进行迅速调整,从而提高转速,实现悬臂式掘进机恒功率变频调速。

图4 模拟截割煤岩硬度较大时的电流响应曲线Fig.4 Current response curve of simulation of cutting coal and rock larger hardness

图5 模拟截割煤岩硬度较小时的电流响应曲线Fig.5 Current response curve of simulation of cutting coal and rock small hardness
4 结束语
恒功率变频调速系统能根据煤矿井下截割煤岩不同的特性,自动调整掘进机牵引速度,从而使截割电机保持恒功率,提高了工作效率,加快响应速度,具有良好的控制特性。进而提高悬臂式掘进机对复杂工况及变化负载的自适应能力。
[1] 黄日恒.悬臂式掘进机[M].北京:中国矿业大学出版社,1996.
[2] 王志武.国内外掘进机截割调速系统的分析[J].煤矿机电,2004,3(3):27-33.
[3] 方连众,张志彬,翟德旭,等.基于单片机的变频调速系统网络控制压紧[J].电子测量技术,2009,34(3):125-128.
[4] 魏景生,吴 淼,刘建功.掘进机智能型自动成形恒功率截割控制系统的研究与应用[J].工矿自动化,2009(7):118-121.
[5] 周黎英.模糊PID控制算法在恒速升温系统中的应用[J].仪器仪表学报,2008,29(2):406-408.
[6] 张 梅.矿井局部通风机的模糊神经网络PID控制器设计[J].煤炭工程,2011(6):127-129.
(编辑李德根)
Controller design for constant power variable frequency speed of boom-type roadheader based on DSP
ZHAO Zhenmin, LIU Ruohan, ZHAO Jie
(School of Electrical&Control Engineering,Heilongjiang University of Science&Technology,Harbin 150022,China)
This paper presents a combination of artificial neural network capable of high nonlinear recognition ability and genetic algorithms in an effort to address amore complex situation and larger load change to which boom-type road headers are exposed in mine tunneling.Thismethod performing better for controlling constant power variable frequency speed system of boom-type roadheader works by using genetic algorithm to train connection weights of BP network,improving network performance and learning efficiency,controlling roadheader by regulating frequency speed according to the actual situation of current,and obtaining system simulation analysis using MATLAB/Simulink software.The experiment show that themethod can design DSP as control core with roadheader constant power speed controller,which demonstrates a certain ability of learning and adaption and promises to adjust themotor speed automatically based on current change,contributing to achieving roadheader constant power variable frequency speed with simple control and high reliability and enhancing working efficiency and system stability.
roadheader;DSP;artificial neural network;genetic algorithms;constant power
10.3969/j.issn.2095-7262.2014.05.022
TD632
2095-7262(2014)05-0539-04
A
2014-08-10
赵振民(1967-),男,黑龙江省双城人,教授,博士,研究方向:机器人控制、高频功率变换、软开关技术,E-mail:ycxh101-cc@126.com。
