合肥智能所智能机器人传感器实验室
2014-10-29高理富孙建
高理富 孙建
(中国科学院合肥智能机械研究所,安徽合肥,230031)
中国科学院合肥智能机械研究所智能机器人传感器实验室,是国家高技术研究发展计划(863计划)先进制造与自动化领域智能机器人传感技术网点实验室,以信息获取科学、人机交互临场感、多传感器信息融合与传输、运动生物力学工程和智能机器人应用为主要研究方向,开展力信息获取和感知系统、智能机器人及其关键技术、数字运动员和运动员指导系统等方面的工作。
一、传感器系统及其应用
本实验室围绕多维力传感器的关键技术,以研究六维力传感器的结构和信息处理为切入点,研制机器人六维腕力/指力/脚踝力传感器、多维阵列式类皮肤传感器、水下和空间特殊环境下的六维力传感器;以六维力传感器技术为基础的带有力/触觉临场感的机器人装配作业平台;机器人传感器系统实验平台;用于体育竞技领域的六维力测试平台、数字铅球;科学普及领域的测力机器人等方面。本实验室自行研制了各种不同量程的六维力传感器标定和测试系统10余台(套),可完成从50g-2000kg以上各种力量程的标定和测试,并有自行设计的标定和评价软件。
目前,公司研制的多维力传感器在中国科学院沈阳自动化研究所、上海交通大学、吉林大学、哈尔滨工业大学、浙江工业大学等科研单位以及ABB公司均有应用。

图1 传感器系统及其应用

图2 多种类型力传感器
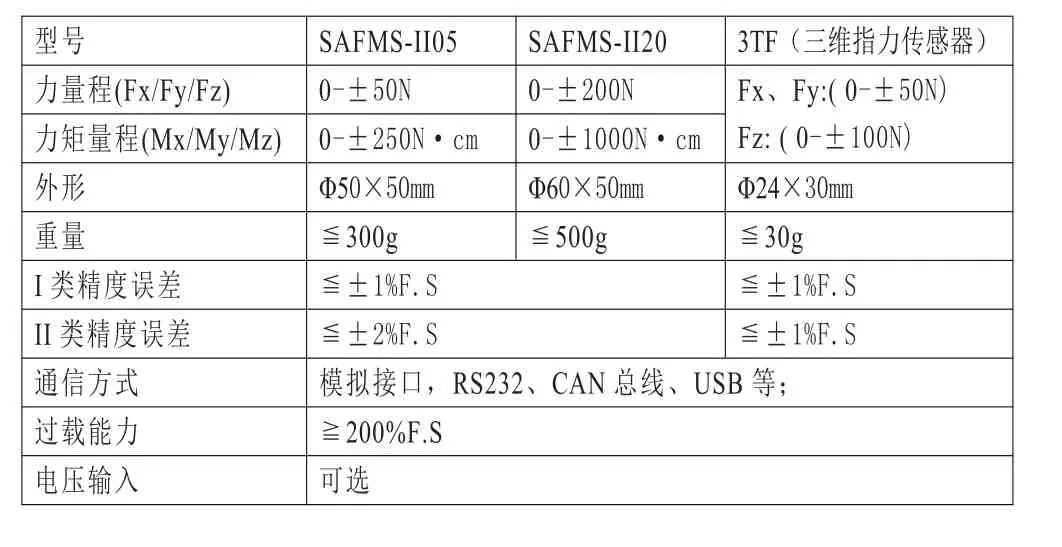
主要基本参数:
二、863机器人传感器实验平台
依托“十五”863基础研究项目“机器人传感器系统实验平台关键技术研究”,安徽省科技重点项目“智能化、高性能机器人传感器系统实验平台”和机器人学开放实验室基金项目“基于传感信息的可视化机器人虚拟控制仿真支持系统” 的研究背景,实验室构建的实验平台涉及到信息处理、网络技术(各传感器可通过CAN总线即插即用,可现场完成传感器的数据采集、处理和评价)、多传感器系统、机器人控制、虚拟现实(可通过虚拟传感器仿真实验系统进行力和超声避碰等虚拟传感器现场实验)等多个学科的前沿技术,用于对智能机器人、机器人化机器的各种传感器的实验、测试、标定和评定。
三、掰手腕机器人

图3 深圳高技术交流博览会展览
掰手腕机器人是一种以电机驱动作为动力,以腕力传感器和臂力传感器测量信息作为反馈的科普性、娱乐性机器人。该机器人的驱动力分为5个级别,对应力的量程为(15kg-80kg),能够满足不同力量人群的需要。该机器人携带的腕力机器人和臂力机器人能够实时测量在比赛过程中人的施力过程,并计算出整个过程力的最大、最小值,该机器人还能够记录比赛过程中精彩片段以及现场打印工作。该机器人主要应用于科研院校、科普馆以及一些娱乐场所。
四、ITER部件转运车
ITER(International Thermonuclear Experimental Reactor),国际热核实验堆,是目前核聚变领域内全球规模最大,影响最深远的科学工程项目。其主要目标是建造一个可持续燃烧的托克马克聚变反应实验室,验证人类和平利用核聚变的可能性。托克马克真空室内有一些设备是由含铍材料制造,铍本身是一种剧毒物质,工作人员不能直接与之接触。为了解决这些问题,本实验室设计一种ITER部件转运车,采用远程操作的方式完成移动、与上中下窗口对接、取出内部部件,与窗口分离,与热室对接等一系列工作,完成托克马克真空室内零部件的转运、拖拉和维修等工作。ITER转运车分为气垫车系统、导航与定位系统、六自由度平台系统、双向密封门系统、大负载拖拉机构系统、控制系统共6个子模块。
1.气垫车
气垫车是利用气体层流效应托举载荷,实现大吨位负载的运输。气垫车可作为一种重载的转运工具,实现ITER部件遥操作的转运任务。
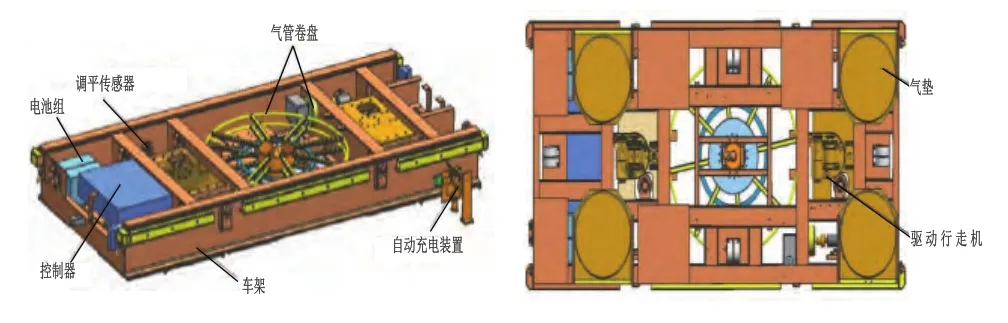
图5 气垫车模块配置图
气垫车采用模块化设计,主要包括桁架式车架单元,气压驱动单元,精密行走单元,控制单元和配置的传感单元,气垫车定位精度4mm,转向精度在0.1°范围内。气垫车有三种控制模式:遥操作,自主避障模式,遥控器模式。
本实验室所设计的气垫车,可作为ITER遥操作中重载转运的重要技术手段。

主要技术参数汇总表
2.六自由度并联平台
六自由度并联平台是转运车上的一个核心部件,其主要功能是:在导航系统的引导下,调整转运车车厢空间的六个姿态,从而完成车厢与托克马克真空室的准确对接。

图6 六自由度并联平台系统
该平台在空间具有六个自由度的调节功能,即yaw(偏航)、roll(横滚)、pitch(俯仰)以及Tx(x轴方向移动)、Ty(y轴方向移动)、Tz(z轴方向移动)运动功能。该平台集成机械、液压和控制为一体,应用高精尖的产品设计方法和理念,设计目标可以承载20t的载荷和具有0.03mm(0.5。)的重复定位精度,可以满足ITER部件转运车车厢的对接需求。
3.双向密封门系统
双向密封门系统是ITER部件转运车的一个很重要的组成部分,其主要作用是保证部件转运车本身的密封性、托克马克装置以及实现转运车与托克马克装置之间的对接、锁紧以及分离等。

?
双向密封门系统安装在部件转运车车厢前后两端,主要有两扇门组成——维护门(Maintenance Door)和小车门(Cask Door)。当转运车没有与真空室对接时,维护门与小车门联接在一起;当转运车与真空室窗口对接并完成一系列操作后,维护门与小车门脱离,小车门继续留在转运车上,而维护门与真空室窗口联接在一起,充当密封真空室窗口的作用。车厢后端只有小车门,在紧急情况(如转运车出现故障)下,救援车通过后端的小车门与该转运车对接。其中,在车厢与窗口、维护门与窗口,维护门与小车门、小车门与车厢之间都设置有密封圈,窗口与车厢之间的密封力由车厢底盘来施加,维护门与真空室窗口之间的密封力和小车门与维护门之间的密封均由螺旋锁紧/解锁机构施加,小车门与车厢之间的密封力由提升机构提供。
4.重型机械臂与拖拉机构
重型机械臂(举升机构)与拖拉机构系统主要是将相关内部部件从真空室移动到转运车车厢内,包括举升机构和拖拉机构。当转运车与真空室窗口对接完成后,通过车厢内部的导轨将重型机械臂移动到指定位置,利用倾斜机构将重型机械臂伸入到待操作部件内并举起,然后再利用提升机构将该部件拉到车厢内,等转运车到热室后,再利用重型机械臂将部件送到热室内。

图7 双向密封门系统

举升机构 拖拉机构举升机构采用液压驱动源的六连杆机构方式,将操作对象举升后并由拖拉机构拖入车厢。采用液压马达驱动钢丝绳牵引,实现举升机构沿导轨往复运行,完成操作对象搬运操作。

图8 举升机构与拖拉机构