安全性汽车线控制动系统及其控制方法研究
2014-10-27陈兴隆张凤登
陈兴隆,张凤登
(上海理工大学光电信息与计算机工程学院,上海 200093)
0 引言
汽车已经成了人们日常生活中不可缺少的代步工具,在享受汽车带来的舒适、快捷、便利的同时,人们对汽车行驶的安全性[1]要求也日益提高。车辆制动系统一直在车辆安全方面扮演着至关重要的角色,随着汽车工业技术飞速发展以及汽车行驶速度的不断提高,车辆制动系统的重要性越来越明显。
传统的液压制动系统[2]发展至今,已是非常成熟的技术,由于人们对制动性能要求的不断提高,传统的液压或者空气制动系统在加入了大量的电子控制系统如 ABS[3](刹车防抱死系统)、ESP[4](车身电子稳定系统)等后,其结构和管路布置越发复杂,液压(空气)回路泄漏的隐患也加大,同时装配和维修的难度也随之提高。因此,汽车行业加大了对结构相对简单的线控制动系统 BBW[5](Brake-by-wire)的研究力度,其主要原因是BBW系统有着传统液压制动系统不可比拟的优越性,该制动系统用电线取代了传统制动系统中的制动管路,省去了传统制动系统中的很多阀,简化了制动系统的结构,降低了装配及维护的难度,同时BBW还具有制动响应速度快、制动性能高等特点,另外,要完全实现ABS(防抱死刹车系统)及ASR(防侧滑系统)等功能,只需在电子控制系统中设计相应程序,操纵电控元件来控制制动力的大小及制动力的分配即可。FlexRay[6]总线因其具有高带宽、通信线路冗余、通讯灵活等优点,成为未来主要的安全型车载总线。国外著名的汽车公司奔驰、宝马、奥迪都对FlexRay总线在汽车上的应用做了尝试。尽管国外很早就开始研究线控制动系统和FlexRay通信,但是时至今日,也未能在汽车上实现合二为一。
1 线控制动系统的原理及结构
系统的总体设计原理如图1所示。
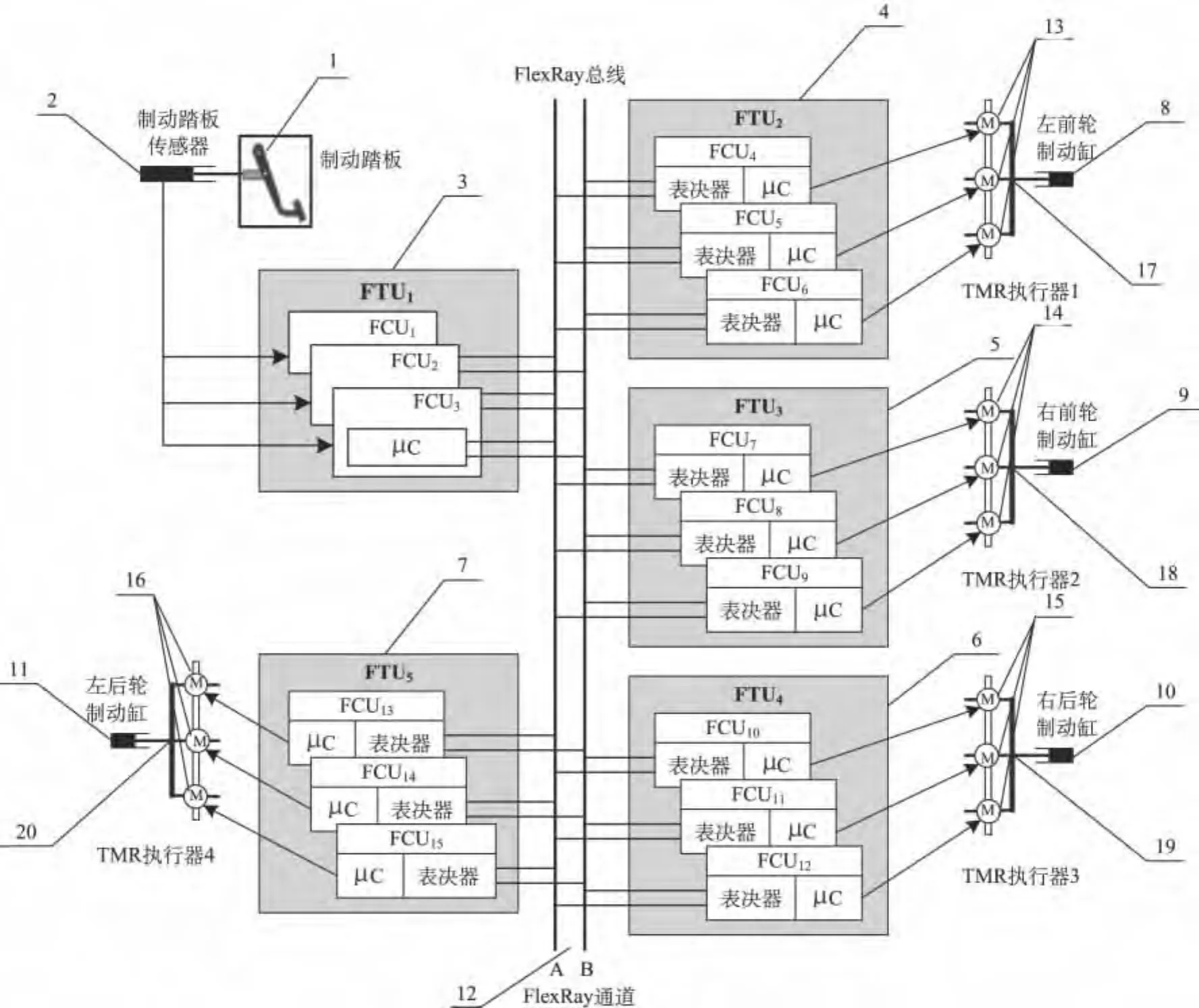
图1 线控制动系统原理及结构图
该系统位于汽车制动踏板和4个车轮的液压制动缸之间,其中包括制动踏板传感器、故障抑制单元(FCU)和由此形成的容错单元、两通道FlexRay总线、驱动马达和机械操纵杆。踏板传感器直接与踏板相连接,该传感器的输出同时进入踏板传感器信号检测单元的3个复制确定性FCU,由于这三个FCU是确定性的,正确的FCU将产生相同的踏板位置报文。为减少产生空间接近故障的可能性,FTU1中的三个FCU可以是物理上分离的,通过FlexRay总线的A、B两个通道,将报文传送到4个车轮上的容错单元。每个车轮上的容错单元也都包括3个FCU,但这些复制确定性FCU与检测单元FTU1中的FCU有所不同,它们都包含一个表决器,在收到报文后,它们首先比较三个FCU的三个独立计算结果,然后选择大多数FCU的计算结果,即三个FCU中的两个所得的计算结果,能在一步之内检测发现错误报文,并屏蔽该错误。
踏板传感器检测到踏板的位置信号,位置信号进入踏板传感器信号检测单元的3个复制确定性FCU,由于这三个FCU是确定性的,正确的FCU将产生相同的踏板位置报文并发送到FlexRay总线上,FlexRay总线的两个通道A、B被配置成相互独立的复制确定性通道,通信系统事先知道每个FCU的合法时间行为,如果一个FCU违背了自身的时间规范,那么通信系统将放弃从这个FCU收到的所有报文,以防止过载情况发生。在没有故障的情况下,每个发送报文的FCU通过两个独立的通信系统各发送1个报文,因此,每个接收报文的FCU将收到来自FCU1、FCU2和FCU3的6个报文。通过总线相互连接的故障抑制单元,能够容忍任意一个通信系统的某个失效。每个车轮的三模冗余(TMR)液压制动执行器包括三个马达,每个马达分别与容错单元的三个FCU输出之一相连接,任意两个马达的力量之和超过第三个马达,即三个FCU输出中的多数输出决定了操纵杆作用点的位置,去除了不一致的输出,TMR可被看作是机械表决器。每个车轮上的容错单元都有一个分布式算法,但一个容错单元所包括的3个FCU使用相同的算法,这些算法根据制动踏板的位置计算车轮上的制动力分配。
2 系统工作流程
本系统的工作流程如图2所示。
踏板传感器检测到制动踏板的位置信号,位置信号进入踏板传感器信号检测单元的3个复制确定性FCU,由于这三个FCU是确定性的,在位置检测单元3的三个FCU所产生的可用报文中,如果两个FCU的报文有完全相同的位模式,那么选取这两个报文中的一个作为三元组的输出。可在一步之内检测发现错误报文,并屏蔽该错误,正确的FCU将产生相同的踏板位置报文并发送到FlexRay总线上,FlexRay总线的各发送1个报文,因此,每个接收FCU将收到来自3个发送FCU的6个报文。
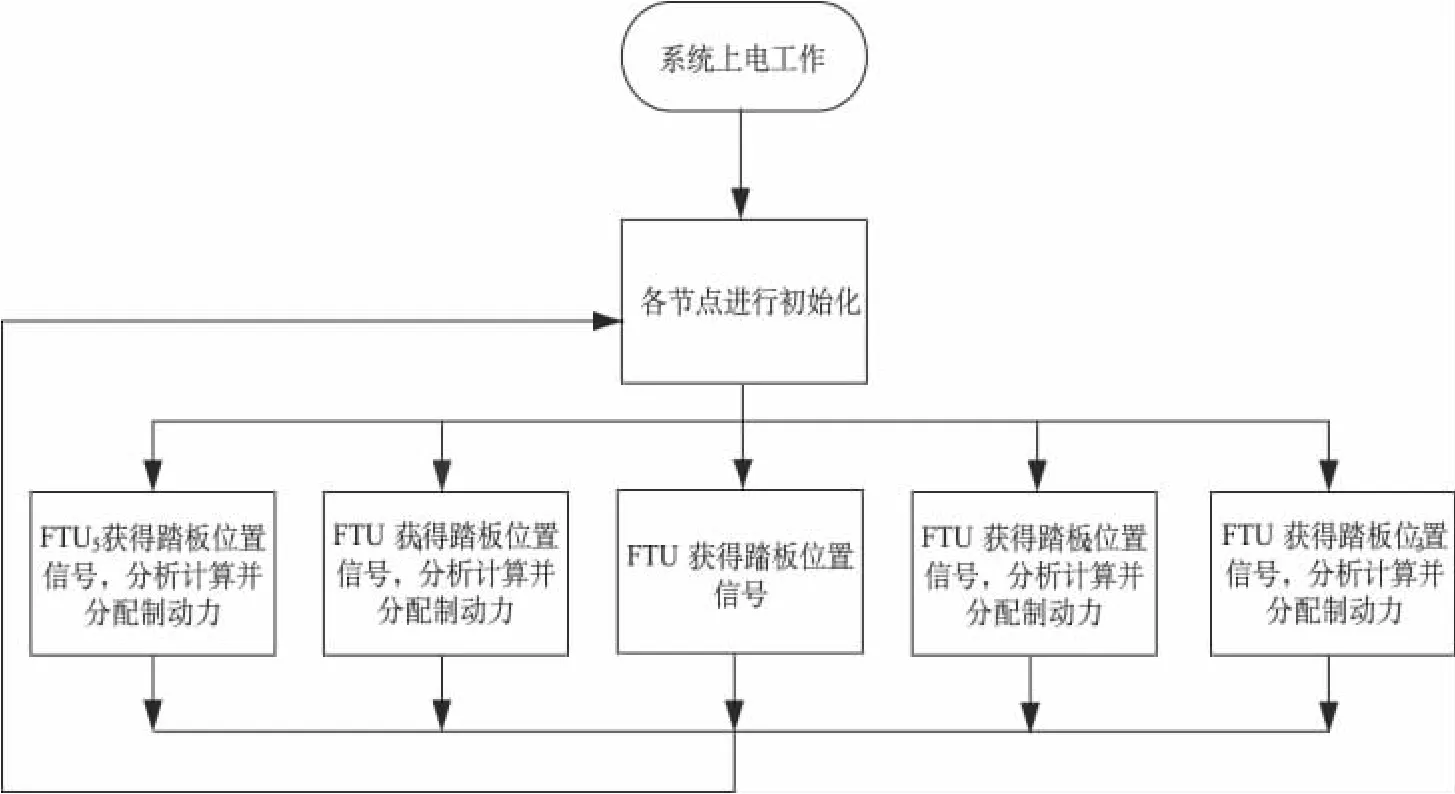
图2 系统工作流程图
四个车轮容错单元中的故障抑制单元(FCU),以左前轮容错单元 FTU2为例,FCU4、FCU5、FCU6各自包含一个表决器,通过FlexRay总线接收踏板传感器信号检测单元所产生的信号,在收到报文后,它们首先比较这三个FCU的三个独立计算结果,然后选择大多数FCU的计算结果,即三个FCU中的两个所得的计算结果,做出精确表决进而得到正确的踏板位置信息。系统控制节点分布在汽车的各个车轮上。每个节点都有一个分布式算法,这些算法根据制动踏板的位置信息计算车轮上的制动力分配。单一节点随机失效、单一通道的报文丢失或马达失灵,都不影响系统的正常运行。
3 FlexRay通信原理
本系统踏板报文的FlexRay通信示意图如图3所示。
软件上,首先采用双通道的FlexRay通信网络,其本身具有双通道的通信结构。在静态时隙1中,FTU1分别两个通道 A、B被配置成相互独立的复制确定性通道,这有助于容忍任一通信系统内的某个失效。所有通信系统与FCU一样,都有权访问全局时基,通信系统了解FCU的合法时间行为。如果一个 FCU违背了自身的时间规范,那么通信系统将放弃从这个FCU收到的所有报文,以防止过载情况发生。在没有故障的情况下,每个发送FCU通过两个独立的通信系统在通道A和B上发送FCU1;静态时隙2中,FTU1分别在通道A和B上发送FCU2;静态时隙3中,FTU1分别在通道A和B上发送FCU3。同时,为了保证传感器报文的实时性,必须利用FlexRay的静态时隙进行传输,这也就意味着同一时间只能有一个节点能够在该时隙进行传输。正常工作时,只用其中一个通道的数据进行通信,当一个通道发生通信错误时,在两个通道进行的通信一致的前提下,系统仍然可以依靠另外一个通道工作。
4 结束语
本系统针对现有汽车制动系统安全性的不足,提出了一种安全性汽车线控制动系统及其控制方法,这是一种结构相对简单、功能齐全、安全可靠,并且能够运用到实际生产中的线控制动操纵系统,其具有很好的实用价值。本系统能够容忍任一通信系统、容错单元中的任一FCU和TMR执行器中的任一马达的随机失效,提高了电子化制动系统的容错能力和汽车的安全运行能力,并能促进汽车电子技术的发展。
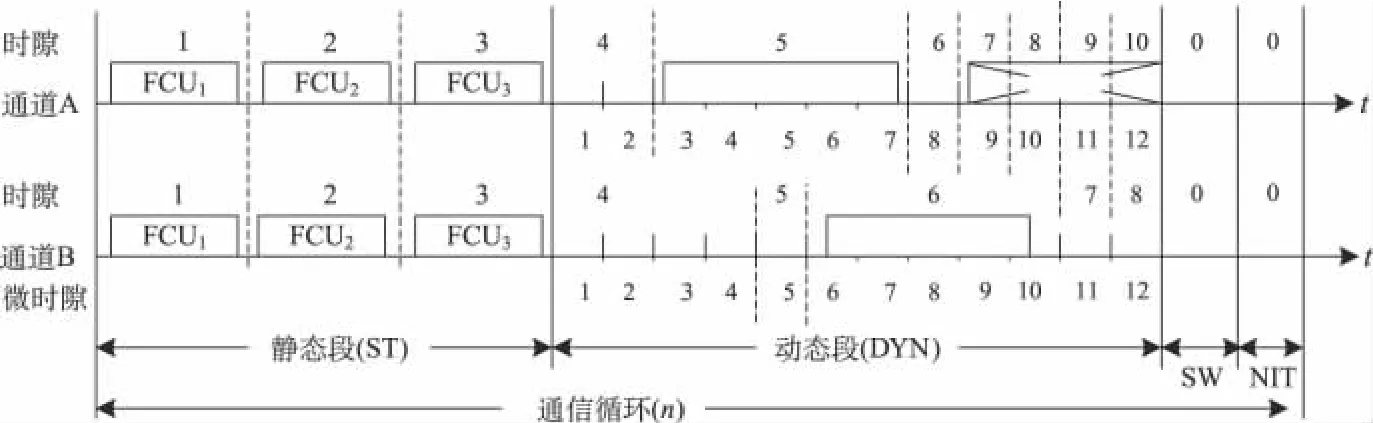
图3 踏板报文的FlexRay通信示意图
[1]沈 沉,王 军,林 逸.电子机械制系统制动执行器建模与试验[J].农业机械学报.2007,38(8):30-33.
[2]林 逸,沈 沉,王 军.线控制动系统防抱死特性模糊控制方法的仿真研究[J].公路交通科技,2006,23(10):124-127.
[3]张宇声,孙丰瑞.故障诊断和容错技术再控制系统中的应用研究[J].海军工程大学学报,2001,13(5):65-70.
[4]王仲生.智能故障诊断与容错控制[M].西安:西北工业大学出版社,2005.
[5]彭晓燕,章 兢.汽车线传电控制动系统及其关键技术分析[J].汽车工程,2007,29(10):880-883.
[6]Bretz E A.By-wire Cars Turn the Corner[J].Spectrum,IEEE.e,2001,38(4):68-73.
