一种基于FIB刻蚀的MEMS陀螺修调方法
2014-10-24刘宇航张瑞雪
刘宇航,周 斌,张 嵘,张瑞雪
(1. 清华大学 精密仪器系,北京 100084;2. 中国兵器工业导航与控制技术研究所,北京 100089)
一种基于FIB刻蚀的MEMS陀螺修调方法
刘宇航1,周 斌1,张 嵘1,张瑞雪2
(1. 清华大学 精密仪器系,北京 100084;2. 中国兵器工业导航与控制技术研究所,北京 100089)
受微加工工艺条件限制,MEMS传感器的结构尺寸等参数总是偏离设计值,使其性能水平难以满足高精度应用的要求。为了抑制一种MEMS陀螺敏感结构的加工误差,分析了其主要运动模态的特性以及耦合误差的主要来源,提出了通过FIB刻蚀手段对陀螺十字型梁结构进行修调的方法,并对修调前后陀螺的耦合误差以及误差的温度稳定性进行了分析比较。对陀螺性能的测试结果表明,两种FIB刻蚀方式分别使陀螺零偏误差比修调前降低约35% 和72% ,而误差的温度稳定性则分别提高了80%和55%,证明修调方法能够抑制陀螺误差、提升陀螺的性能。
MEMS陀螺;FIB刻蚀;零偏误差;修调
MEMS陀螺在汽车稳定系统、个人娱乐设备、智能手机等对精度要求较低的领域已经获得了广泛的应用[1]。在军用领域,MEMS陀螺目前已应用于一些低精度场合,但在中、高精度场合,MEMS陀螺的性能水平尚不能满足应用需求,主要问题是MEMS陀螺的环境适应性如零偏温度漂移、力学敏感性较差[2]。这些缺点主要源于微加工工艺限制造成的陀螺结构参数与设计理想值存在偏差,因此亟需发展可以有效改善由加工误差造成的陀螺缺陷的修调方法。
密歇根大学开发了一种基于飞秒激光的 MEMS谐振器的频率微调方案,通过对谐振器敏感质量进行刻蚀可以改变谐振器沿该方向振动的谐振频率[3];美国BEI公司的研究人员通过激光对一种音叉式陀螺的叉枝刻蚀从而在加工位置去除一定质量,使刻蚀后陀螺的耦合误差减小[4];最近国内北京理工大学和国防科技大学也研究了基于纳秒和飞秒激光的 MEMS陀螺修调方法,修调后陀螺的零偏误差比修调前明显降低,性能得到提升[5-6]。这些修调方法利用激光脉冲对指定位置进行刻蚀,从而改变传感器的输出。而本文介绍了一种基于FIB(Focused Ion Beam,聚焦离子束)技术的MEMS陀螺修调方法,通过刻蚀陀螺梁结构改变陀螺主要运动方向的整体刚度对称性或梁结构局部的对称性,修调后既可抑制陀螺的耦合误差又可提升耦合误差的温度稳定性。此外,FIB系统自身集成了极佳的SEM成像功能,更适合对MEMS陀螺上微小结构的精细修调加工。
1 一种线振动MEMS陀螺的基本结构和主要误差模型
一种线振动式MEMS陀螺的结构如图1所示。
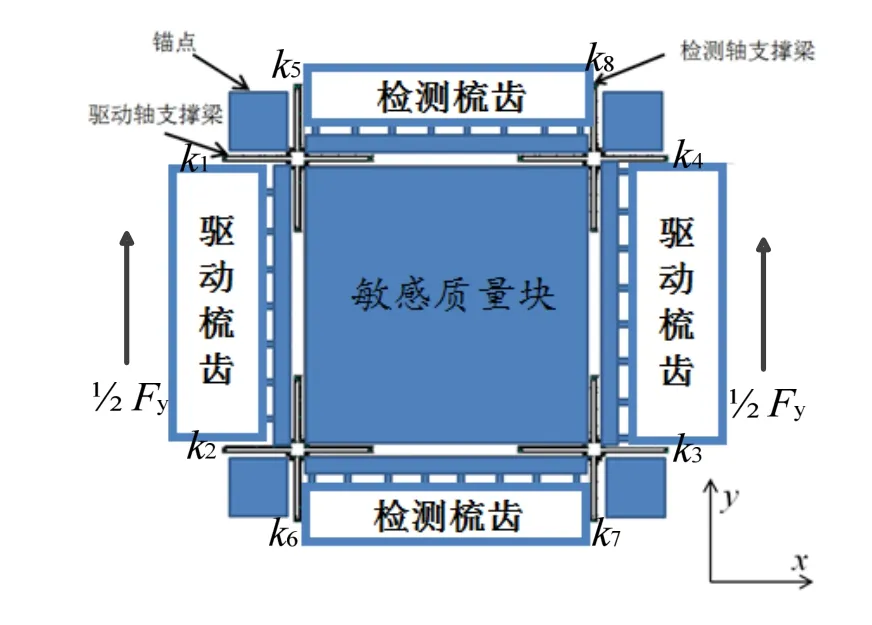
图1 MEMS陀螺整体结构Fig.1 Layout of the MEMS gyroscope
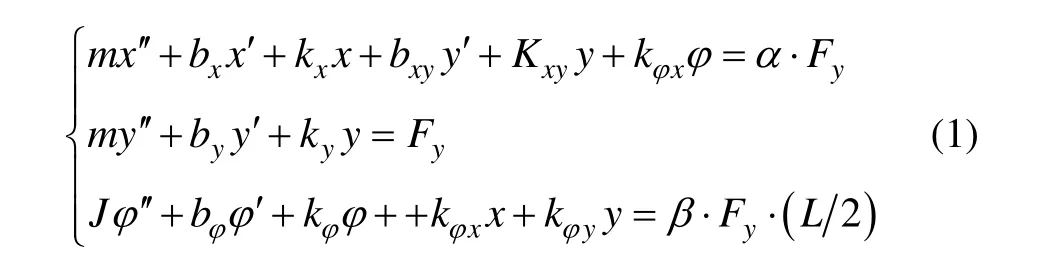
为使陀螺驱动方向的振幅达到最大,通常工作在驱动方向谐振频率附近[7]( ω≈ ωy),即:
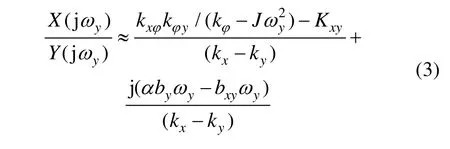
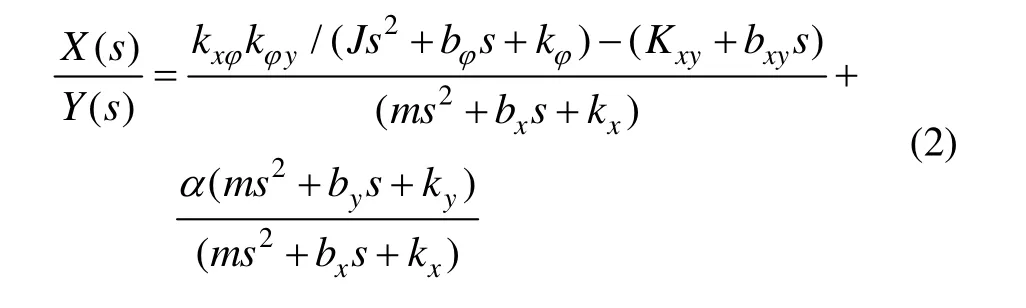
式中,分子部分如果不为0,则陀螺x、y方向之间存在哥氏力之外的耦合作用。对图1陀螺结构进行受力分析解得:
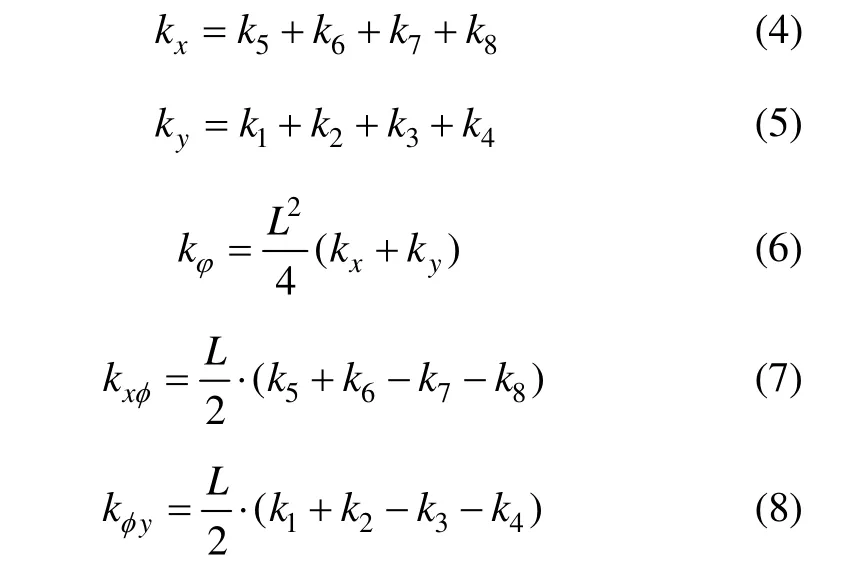
Fy对x方向的力耦合以及x、y方向之间其它形式的阻尼耦合作用则构成了式(3)分子部分的虚部,这些因素通常在量级上小于构成实部的耦合因素。因此FIB刻蚀的目的是抑制陀螺产生耦合误差作用的主要因素,即式(3)分子的实部部分,使陀螺的运动特性更接近于理想状态。
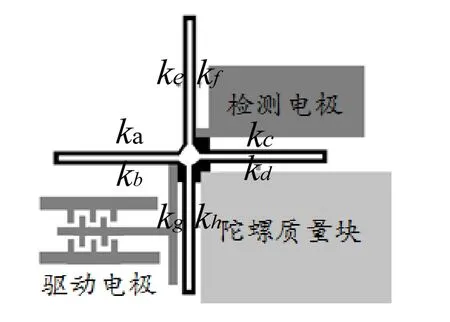
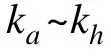
图2 陀螺梁结构示意图Fig.2 Structure of a beam of the MEMS gyroscope
2 MEMS陀螺的FIB修调方法
2.1 FIB加工系统
FIB(聚焦离子束)技术利用电透镜将Ga离子聚焦成直径非常小的离子束。这种离子束通过物理碰撞改变样品形貌从而对样品表面加工[8]。Tescan公司的FIB加工系统如图3所示。
实际使用时通过电子束进行观察,并使用离子束对所见位置样品进行刻蚀加工。由于聚焦后离子束的直径小至几十至几百纳米,因此在样品表面可实现极佳的加工精度。
图3 FIB加工系统Fig.3 FIB micro-machining system
2.2 FIB刻蚀抑制陀螺耦合误差的原理
刻蚀陀螺梁结构会改变其刚度,考察式(3)的分子部分作为陀螺修调的评价指标,即x、y方向之间的的耦合误差系数:




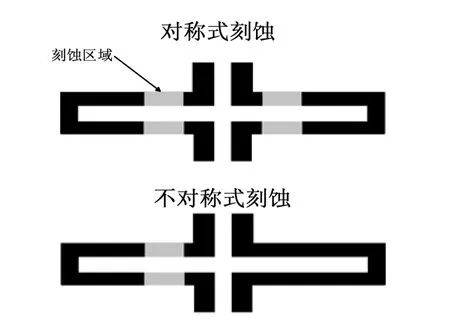
图4 对称式刻蚀和不对称式刻蚀方式Fig.4 Symmetric and asymmetric etching
3 FIB刻蚀试验结果
3.1 对称式FIB刻蚀

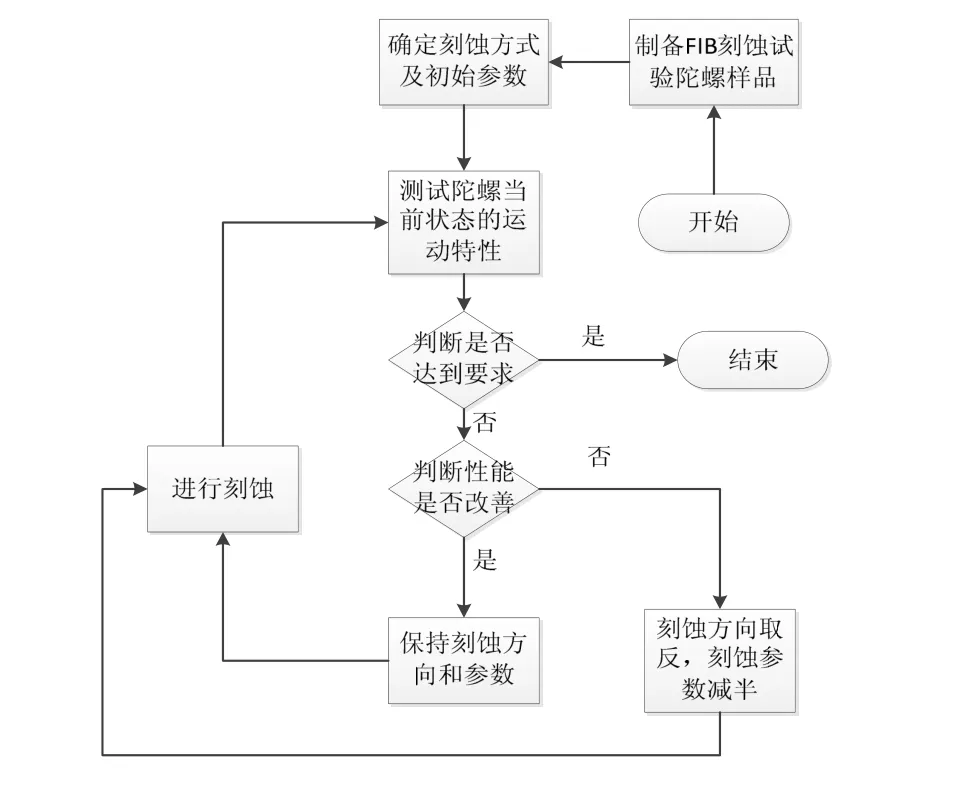
图5 MEMS陀螺的FIB修调流程图Fig.5 Flow chart of MEMS gyro’s FIB etching process
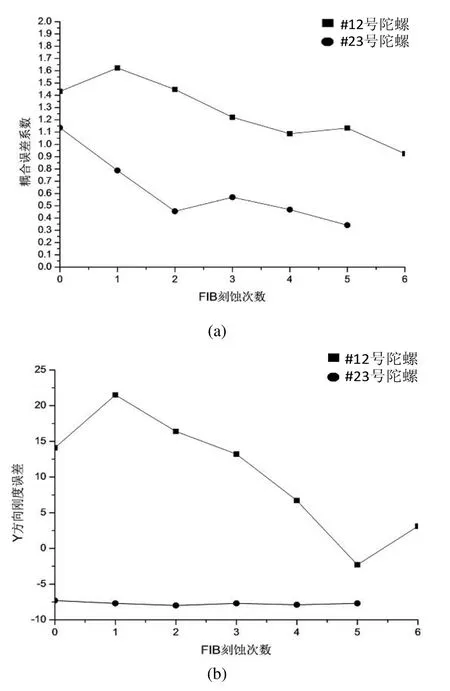
图6 25℃时 Kc/y方向刚度误差与刻蚀次数之间的关系Fig.6 K c/stiffness errors of y axis vs. etching times at 25℃
3.2 不对称式FIB刻蚀
从图6(b)中可以看出,由于非对称刻蚀方式对陀螺 y方向梁的总刚度改变是一致的,所以刻蚀后#23号陀螺y方向刚度误差的变化比#12号陀螺的变化量小,经各次刻蚀后其值均约为-7.5 N/m;而刻蚀后 Kc从刻蚀前的 1.14 N/m降低至第五次刻蚀后的 0.32 N/m,说明这种不对称式FIB修调可以抑制#23号陀螺的误差耦合作用。
3.3 FIB刻蚀对陀螺温度稳定性的影响
根据式(9), Kc是陀螺结构参数的函数,而如刚度、气体阻尼等主要参数均与其所处的环境因素(如气压、温度等)有关[9]。MEMS陀螺工作环境的温度是一种重要的环境因素,研究陀螺耦合误差的温度稳定性对提高陀螺性能具有重要意义。
进行陀螺性能测试时,利用温度控制装置将测试温度分别控制在5个不同值:25℃、35℃、45℃、55℃,65℃,这样既可测试同一温度的 Kc与刻蚀次数之间的关系,又能测试经过各次刻蚀后 Kc随温度变化的关系。陀螺温度特性的测试装置如图7所示,它主要由TEC半导体制冷片、温度传感器、温度控制电路和散热装置组成。制冷片表面的温度受温控电路控制,而测试陀螺与制冷片接触一段时间后,其温度逐渐与制冷片表面温度一致,而陀螺的另一面与测试系统联接,所以系统可在不同温度下方便地对陀螺运动特性进行测试。
对各次刻蚀后不同测试温度条件下的 Kc值进行一次拟合,即可得到其温度系数与刻蚀次数之间的关系,如表1所示。FIB刻蚀对陀螺耦合误差的温度稳定性具有明显影响。由于陀螺耦合误差各组成部分自身的温度特性不同,修调后该值的变化和其温度系数的变化并不完全一致:即当 Kc的值达到最小时,其温度系数并未达到最小;反之,当温度系数处于最小值时 Kc的值却未达到最小。
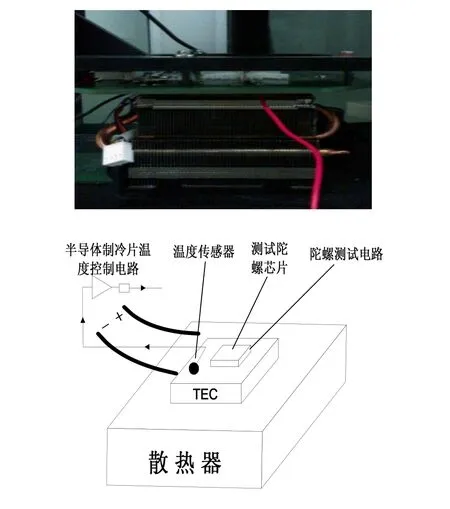
图7 陀螺温度特性测试装置Fig.7 Testing system of gyro’s thermal characteristics
分析表1可知,#12号陀螺经过三次刻蚀后其温度稳定性达到最好,温度系数的绝对值比刻蚀前降低约80%;而#23号陀螺经过2次刻蚀后比刻蚀前降低约55 %。
测试结果表明,适当选取FIB刻蚀参数,可降低测试陀螺耦合误差的温度敏感性,提高陀螺对工作环境的适应性。
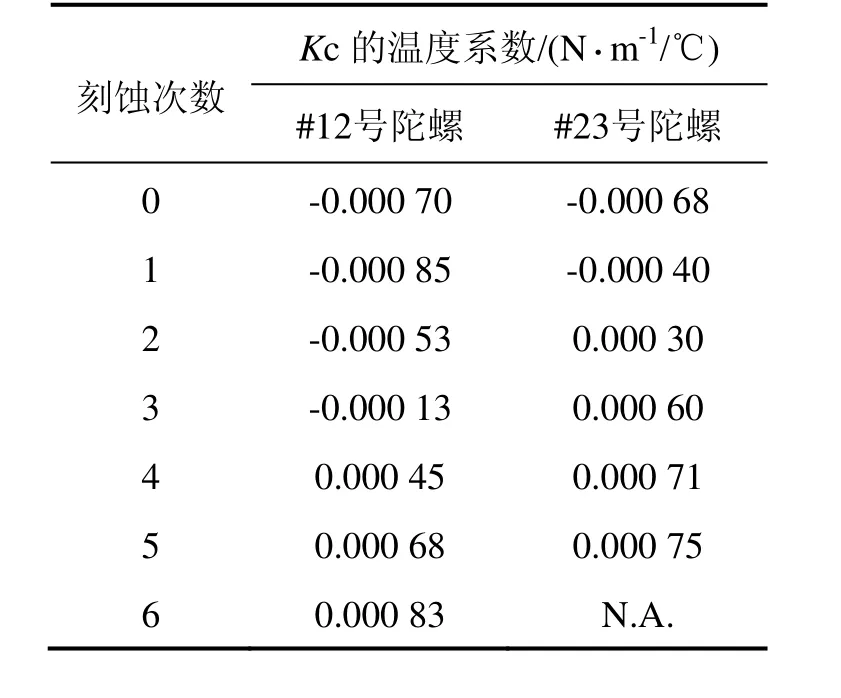
表1 FIB刻蚀与Kc 温度系数之间的关系Fig.1 Relation between Kc’s temperature coefficients and FIB etching
4 结 论
本文从MEMS陀螺的误差模型入手,推导了耦合误差系数 Kc。该系数体现了由微加工工艺缺陷所造成的陀螺非理想运动特性,其中,梁结构的尺寸参数与设计值之间的偏差是耦合误差产生的主要原因。为了抑制这种有害的非哥氏力耦合,通过FIB对陀螺y方向的梁结构进行刻蚀加工。试验证明改变被刻蚀梁的刚度可以抑制x、y方向之间的耦合误差,提高刻蚀后陀螺误差的环境稳定性。
由于缺乏精密的控制方式,FIB修调在消除陀螺原有结构缺陷的同时也会带来由刻蚀误差造成的新的缺陷,使最终的修调效果受到负面影响。因此,未来将继续研究更精密地控制加工区域的手段,进一步提高陀螺的修调精度。
(
):
[1] Shaeffer D K. MEMS inertial sensors: A tutorial overview[J]. IEEE Communications Magazine, 2013, 51(4): 100-109.
[2] Acar C, Schofield A R, Trusov A A, et al. Environmentally robust MEMS vibratory gyroscopes for automotive applications[J]. IEEE Sensors Journal, 2009, 9(12): 1895-1906.
[3] Hsu W T, Brown A R. Frequency trimming for MEMS resonator osicillators[C]//IEEE International Conference on Frequency Control Symposium. 2007 Joint with the 21stEuropean Frequency and Time Forum.. 2007: 1088-1091.
[4] Knowles S J, Moore R H. Tuning fork with symmetrical mass balancing and reduced quadrature error[P]. US, No. 6701785.
[5] Ke Z, Li-Hui F, Qian-Qian W, et al. Suppressing the mechanical quadrature error of a quartz double-H gyroscope through laser trimming[J]. Chinese Physics B, 2013, 22(11): 117901.
[6] Hu S, Cui H, He K, et al. A method of structural trimming to reduce mode coupling error for micro-gyroscopes[C]// 2013 8th IEEE International Conference on Nano/Micro Engineered and Molecular Systems. 2013: 805-808.
[7] Trusov A A, Schofield A R, Shkel A M. Micromachined rate gyroscope architecture with ultra-high quality factor and improved mode ordering[J]. Sensors and Actuators A: Physical, 2011, 165(1): 26-34.
[8] Jones H G, Mingarda K P, Cox D C. Investigation of slice thickness and shape milled by a focused ion beam for three-dimensional reconstruction of microstructures[J]. Ultramicroscopy, 2014, 139: 20-28.
[9] Trusov A A, Schofield A R, Shkel A M. Performance characterization of a new temperature-robust gainbandwidth improved MEMS gyroscope operated in air[J]. Sensors and Actuators A: Physical, 2009, 155(1): 16-22.
A trimming method for MEMS gyroscopes by focused ion beam etching
LIU Yu-hang1, Zhou Bin1, ZHANG Rong1, ZHANG Rui-xue2
(1. Department of Precision Instrument, Tsinghua University, Beijing 100084, China; 2. Navigation and Control Technology Research Institute, Norinco Group, Beijing 100089, China)
Due to deficiency in micro-machining processes, the structural parameters of MEMS sensors are usually deviated from their designed values and failed to meet the requirement of high-precision applications. In order to suppress the fabrication errors of MEMS gyroscopes, their primary modes of motions and the sources of coupling errors were analyzed. A trimming method by FIB etching on gyro’s folded-beams was also developed. Moreover, the performance tests of gyroscopes before and after trimming were conducted. Test results show that the zero-rate outputs were reduced by 35% and 72%, while the bias’ stability over temperature were increased by 80% and 55% respectively, after trimmed by two FIB etching strategies, which confirm the effectiveness of FIB trimming in suppressing the errors and improving the performance of gyroscopes.
MEMS gyroscope; focused ion beam etching; zero-rate output; trimming
1005-6734(2014)05-0660-05
10.13695/j.cnki.12-1222/o3.2014.05.020
V241.53
A
总装备部惯性预研项目(51309010301)
刘宇航(1986—),男,博士研究生,从事组惯性传感器研究。E-mail:yuhang1986@gmail.com
联 系 人:张嵘(1969—),男,研究员,博士生导师。E-mail:rongzh@mail.tsinghua.edu.cn