基于滑模的舰艇无人直升机悬停控制
2014-10-24侯志宁颜富强邓志雄
侯志宁,颜富强,邓志雄,王 婕
(1. 天津航海仪器研究所,天津 300131;2. 92330部队装备部,青岛 266100;3. 海南三亚市91458部队,三亚 572021;4. 河北工业大学控制科学与工程学院,天津 300130)
基于滑模的舰艇无人直升机悬停控制
侯志宁1,颜富强2,邓志雄3,王 婕4
(1. 天津航海仪器研究所,天津 300131;2. 92330部队装备部,青岛 266100;3. 海南三亚市91458部队,三亚 572021;4. 河北工业大学控制科学与工程学院,天津 300130)
考虑到小型无人直升机在飞行过程中存在的不确定对无人直升机飞行控制性能的影响,设计了一种基于滑模的非线性鲁棒控制器。首先分析了悬停平衡条件下小型无人直升机的数学模型,然后通过设计滑模面,并结合标称系统的反馈增益,获得了滑模面的设计参数。在此基础上设计了基于指数趋近律的滑模控制器,并利用Lyapunov理论对整个系统的稳定性进行了分析。最后的仿真结果表明:给出的滑模控制策略能够有效地处理模型参数不确定对无人直升机飞行控制性能的影响,验证了该控制策略的有效性。
无人机直升机;滑模;悬停;控制
小型无人直升机具有垂直起降、空中悬停、机动性好等特性,在军民领域有着广泛的应用前景,因此,成为当前无人机发展的一个重要方向[1]。然而,小型无人直升机是一个高度非线性、强耦合的复杂系统,其悬停控制是该领域研究的重点和难点问题。文献[2-3]采用基于智能学习方法实现了无人直升机的悬停控制,取得了比较好的效果。文献[4]给出了基于智能控制的无人直升机层级模型,并应用于R-50的无人机控制中。文献[5]将遗传算法和模糊控制相结合,实现了小型直升机的悬停控制。尽管,一些智能控制方法在无人直升机的悬停控制中得到了广泛的应用,但是,也存在着一些问题,如智能控制方法对环境的自适应能力较差;神经网络虽然能较好解决无人直升机系统中的一些非线性和模型摄动问题,但控制效果依赖于模型的精确程度[6-8]。
1 小型无人直升机数学模型
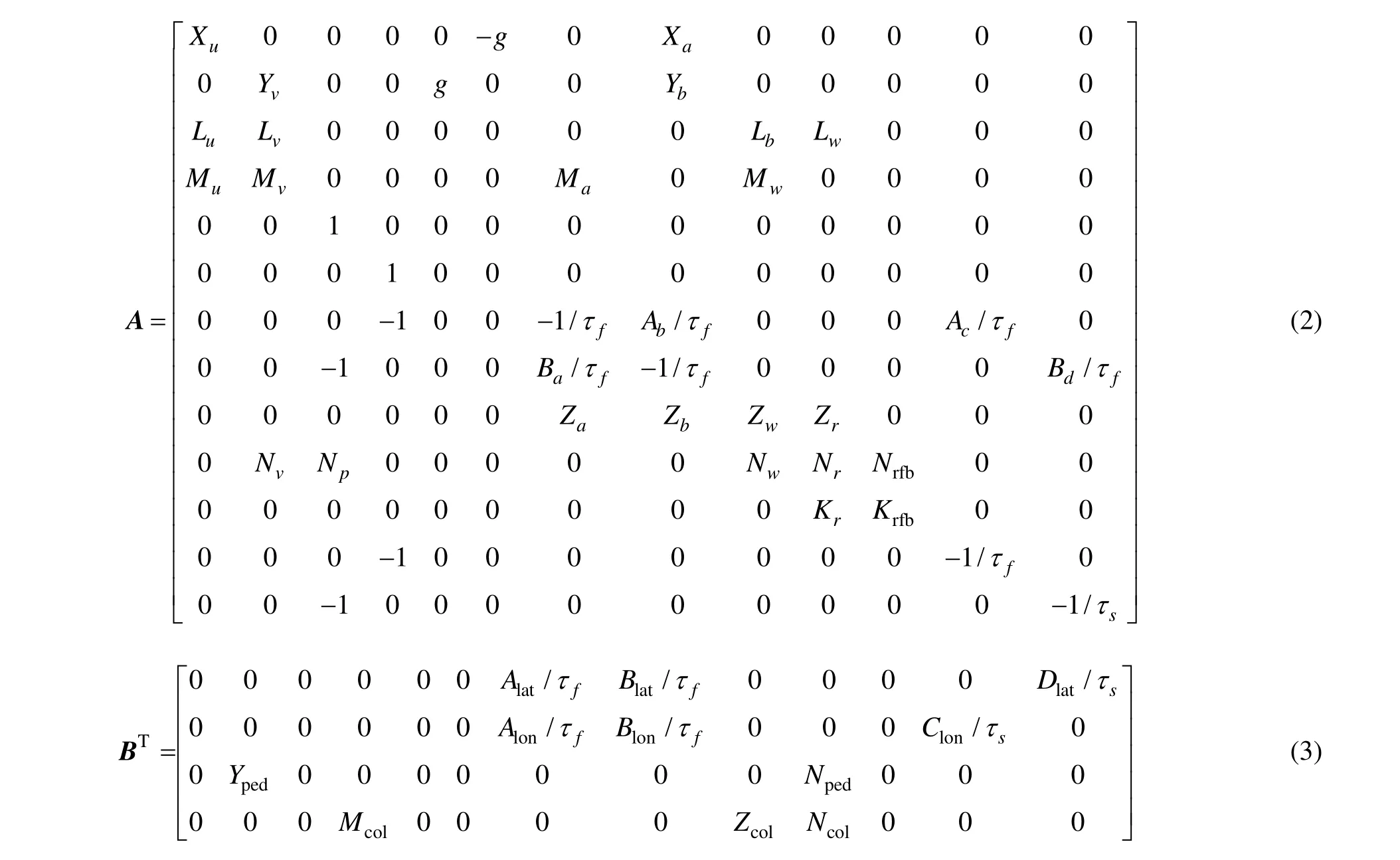
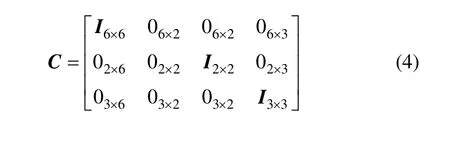
对小型无人机做如下假设:地球为惯性参考系,飞机为刚体,质量为常数且飞行过程中重力加速度为常值。将机体坐标作为参考坐标系,依据牛顿第二定律,可建立描述其小型无人机的运动方程。将获得的方程在给定的平衡点处进行小扰动线性化,可获得无人机小扰动线性化方程,如下所示:

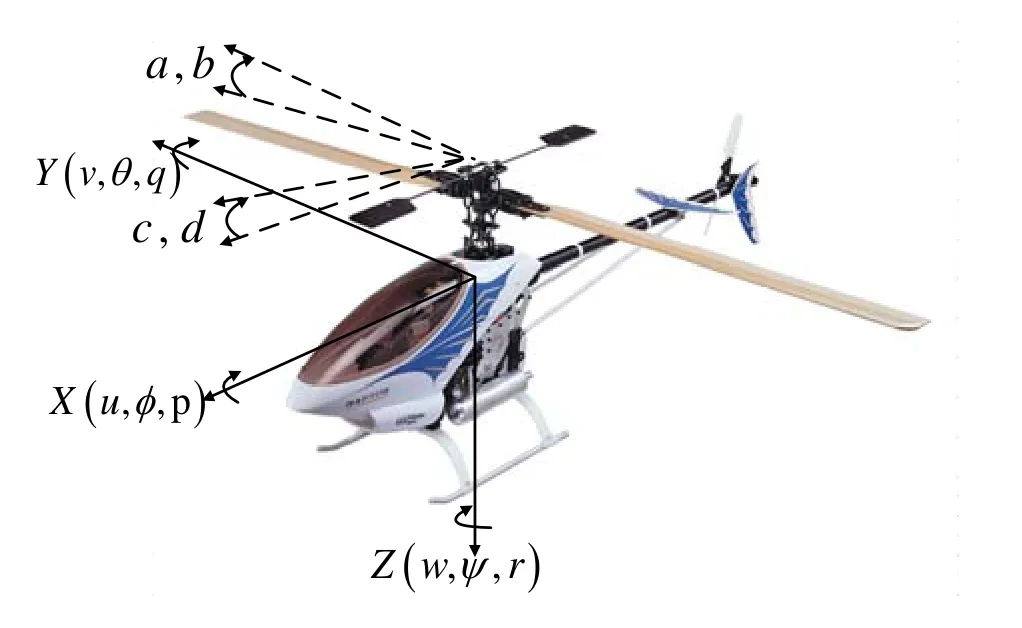
图1 小型无人直升机参数示意图Fig.1 Schematic of small unmanned helicopter parameters
2 滑模控制器的设计
滑模控制是近年来发展较快的一种控制方法,滑模控制器的设计包括设计滑模面和到达条件。滑模面一般是根据性能指标的要求定义的,滑模面的定义要保证当系统滑动模态(一般为待控制状态量)收敛到滑模面上时,系统的性能指标达到要求。所以滑模控制的任务是设计控制器使系统滑动模态最终收敛到滑模面上并且保持在滑模面上运动。
2.1 滑模面的设计
考虑模型参数匹配不确定对无人机模型的影响,将无人机的系统状态方程(1)进一步写为如下形式:

式中 ΔAx (t)和 ΔBu( t)分别是由于建模不准确引起的匹配不确定,即满足条件:

针对上述多输入多输出系统,设计滑模面:



进一步可将控制律写为如下的形式:


2.2 指数趋近律
根据滑模变结构原理,到达条件的设计必须保证滑动模态在有限时间内收敛到滑模面上并保持在滑模面上运动。目前研究较多的是符号函数到达条件,文献[10]就是用的这种方法设计的滑模控制器。为消除抖振,这种方法还需定义一个边界层,但边界层的存在会降低系统的响应速度,并且导致稳态误差的产生。针对符号函数到达条件的上述缺点,本文采用指数趋近律作为到达条件设计滑模控制器,有效解决了跟踪速度慢和存在稳态误差的问题,并且具有较强的鲁棒性。
因此,为了获得更好的动态性能,设计如下的指数趋近律:

上述的指数趋近律的设计过程中,趋近速度从一个较大值逐步减小到零,不仅缩短了趋近时间,而且使系统运动轨迹到达切换面时的速度很小,能够有效减弱控制抖振。
2.3 控制器及稳定性证明
根据上文滑模控制律可表示为如下形式:

定理1:针对无人机纵向模型式(4),选择控制器为

其中,sign(·)是符号函数,ε 、 k为可调参数,取式(5)形式的滑模面,则系统满足滑模到达条件,且系统是渐近稳定的。
证明:选取Lyapunov函数:

对式(13)进行求导,可得:

将式(10)和(11)带入到(14),可得到下式:
根据李亚普诺夫稳定性判据可得,本文给出的控制律将确保无人直升机系统最终稳定。
3 仿真验证

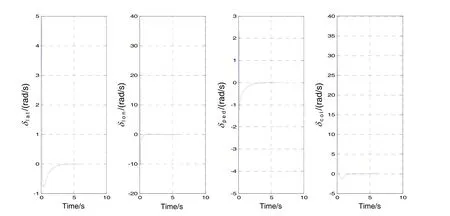
图3 无人机悬停状态下的控制变化曲线Fig.3 Control curves of UAVs in hover state
4 结 论
考虑模型参数不确定对控制性能的影响,提出了基于滑模的小型无人直升机悬停控制策略,并对滑模面和滑模控制器进行了设计,并利用Lyapunov理论证明了系统的稳定性,最后对加入不确定后的系统模型进行了仿真验证。仿真结果表明该控制策略能够有效处理模型参数不确定的影响,最终实现小型无人直升机的悬停控制。
(
):
[1] Schmidt G T, Phillips R E. INS/GPS integration architecture performance comparisons[R]. Navigation Sensors and Integration Technology, RTO-EN-SET-064. London, UK: NATO, 2003: 127-132.
[2] Gao Guojiang, Lachapelle G. INS-assisted high sensitivity GPS receivers for degraded signal navigation[C]//ION GNSS. Texas, USA, 2006: 2977-2989.
[3] 王新龙,于洁. 基于矢量跟踪的SINS/GPS深组合导航方法[J].中国惯性技术学报,2009,17(6):710-717.
WANG Xin-long, YU Jie. Deeply SINS/GPS integrated navigation method based on vector tracking[J]. Journal of Chinese Inertial Technology, 2009, 17(6): 710-717.
[4] 张敏虎,任章,华春红. UKF在深组合GPS/INS导航系统中的应用[J]. 中国惯性技术学报,2009,17(6):697-700.
ZHANG Min-hu, REN Zhang, HUA Chun-hong. Application of UKF in deeply coupled GPS/INS navigation system[J]. Journal of Chinese Inertial Technology, 2009, 17(6): 697-700.
[5] Badu R, Wang Jinling. Ultra-tight GPS/INS/PL integration: A system concept and performance analysis [J]. GPS Solutions, 2009, 13(1): 75-82.
[6] Kim J W, Hwang D H, Lee S J. A deeply coupled GPS/INS integrated Kalman filter design using a linearized correlator output[C]// IEEE/ION, Position, Location, and Navigation Symposium. San Diego, California, 2006: 300-305.
[7] Dolecek G J, Mitra S K. On design of CIC decimation filter with improved response[C]//ISCCSP. Malta, 2008: 1072-1076.
[8] Badu R, Wang Jingling. Comparative study of interpolation techniques for ultra-tight integration of GPS/INS/PL sensors[J]. Journal of Global Positioning Systems, 2005, 4(1): 192-200.
[9] 唐康华. GPS/MIMU嵌入式组合导航关键技术研究[D]. 长沙:国防科技大学,2008.
TANG Kang-hua. Research on the key technology of embedded GPS/ MIMU integrated navigation[D]. Changsha: National University of Defense Technology, 2008.
[10] Ohlmeyer E J. Analysis of an ultratightly coupled GPS/INS system in jamming[C]//IEEE/ION, Position, Location, and Navigation Symposium. San Diego, California: 2006: 44-53.
Sliding mode control for small unmanned helicopter in hover
HOU Zhi-ning1, YAN Fu-qiang2, DENG Zhi-xiong3, WANG Jie4
(1. Tianjin Navigation Instruments Research Institute, Tianjin 300131, China; 2. Armament Department of Unit 92330, Qingdao 266100, China; 3. Unit 91458 of PLA, Sanya 572021, China; 4. School of Control Science and Engineering, Hebei University of Technology, Tianjin 300130, China)
In view that the uncertainty of the small unmanned helicopter in flight could influence its flight control performance, a nonlinear robust control strategy based on sliding mode control is proposed. At first, the mathematical model of the small unmanned helicopter is analyzed under equilibrium conditions in hover. Then a sliding mode surface is designed whose parameters are obtained from the feedback gain of the nominal system. The sliding mode control law is designed based on the index reaching law, and the whole system’s stability is analyzed by using Lyapunov theory. Simulation results show that the sliding mode control strategy can effectively deal with the parameter uncertainty’s influence on unmanned helicopter’s flight control performance, and verifies the effectiveness of the control strategy.
unmanned helicopter; sliding mode; hover; control
1005-6734(2014)05-0640-04
10.13695/j.cnki.12-1222/o3.2014.05.016
U666.1
A
2014-05-18;
2014-09-06
国家自然科学基金 (61203142);河北省自然科学基金(F2014202206);天津市自然科学基金(13JCQNJC03400)
侯志宁(1986—),男,工程师,从事惯性导航与控制研究。E-mail:zhnhou@163.com
联 系 人:颜富强(1965—),男,高级工程师,从事惯性导航与控制研究。