低压微电网三相逆变器功率耦合下垂控制策略
2014-10-18彭春华王立娜李云丰
彭春华,王立娜,李云丰
(华东交通大学 电气与电子工程学院,江西 南昌 330013)
0 引言
作为智能电网与第三次工业革命中能源互联网的重要组成部分,微电网是一种由负荷和微电源(即微电网中的分布式电源)共同组成的可控区域性系统[1-5]。为了能与电力系统友好地融合,实际应用中的微电网需要在通信网络的支撑下通过配网级、微电网级和单元级3个层次控制系统间的协调合作[6]。该协调合作一般可由微电网级中央控制器进行集中控制和优化管理,协调整个层次控制系统;微电网中光伏发电、风力发电等基于可再生能源的分布式发电单元级的就地控制器负责采集系统运行数据、传输控制指令以及保持系统电压和频率稳定性。微电网在并网运行时,由于电网可以稳定系统的频率,就地控制单元一般不需要进行频率调节,分布式发电单元的逆变器一般采用PQ控制,输出中央控制器指定的有功和无功功率;在孤岛运行时就地控制单元则通常需基于下垂控制方法自动跟踪负荷变化以维持系统电压和频率稳定[7]。这种传统的微电网控制策略决定了分布式电源逆变器在微电网运行方式发生改变时需要及时改变控制模式,这必然增加控制模块设计和实际操作的复杂性。
此外,尽管常规下垂控制在线路感性占优的中压电网中已被验证对调控电压幅值和频率具有比较理想的效果,但下垂控制的原理决定了其控制性能对线路阻感比(R/X)具有高度的依赖性。因此,在线路阻抗常呈阻性或阻感性的低压微电网中,其较高的阻感比将直接导致常规下垂控制系统不稳定并难以实现对电能质量的有效控制[8-9]。解决这一问题最直接的方法是在分布式发电单元的逆变器和交流母线间外接大电感以重新维持线路感性占优,但这必然会导致系统体积、成本和损耗增加,总效率降低,输出电压压降增大。为此,相关文献中提出了一些下垂控制改进方法,如:当线路的阻性成分和感性成分均不可忽略时,采用有功和无功功率解耦的方法可以精确控制系统的输出功率,但这种方法需要精确地获得线路中阻感比数值[10-11],这在实际应用中难度较大;为了减小线路高阻感比对下垂控制器的影响,一些文献提出在逆变器的闭环控制外加入虚拟阻抗模块,通过虚拟阻抗来模拟硬件线路阻抗,以抑制阻抗差异对逆变器功率分配的影响,同时还能限制并联逆变器间的环流或电网扰动引起的过电流[12-14],但这种方法在系统带谐波含量较大的负载时,会因为虚拟电感的作用而使得输出电压畸变严重,并且应用过程中虚拟阻抗值的大小也很难确定,设置过小难以改善控制效果,过大则会导致输出电压出现明显降落[15-16]。
为了能克服上述问题,本文将针对低压微电网中三相逆变器控制提出一种改进型通用下垂控制策略,基于通用下垂控制原理,将PQ控制和下垂控制有机融合,设计一种改进型PQ-fU功率耦合下垂控制方法,该控制策略适用于并网/孤岛2种运行模式,避免了控制模式切换,实现对低压微电网电能质量灵活而有效的控制。
1 常规三相逆变器下垂控制分析
微电网的常规下垂控制是通过模拟传统发电机的下垂特性实现微电网中微电源的并联运行,其实质为:各逆变单元检测自身输出功率,通过下垂特性得到输出电压频率和幅值的指令值,然后各自反相微调其输出电压幅值和频率以达到系统有功和无功功率的合理分配。逆变器输出电压频率和幅值的下垂特性为[16-17]:

其中,ω0、U0分别为逆变器输出的额定角频率、额定电压;kp、kq为逆变器下垂系数;P、Q分别为逆变器实际输出的有功功率和无功功率;P0、Q0分别为逆变器额定有功和无功功率。
由式(1)可得如图1所示三相逆变器常规的P-f和Q-U下垂控制框图。

图1 常规下垂控制框图Fig.1 Block diagram of conventional droop control
常规下垂控制是在系统并联逆变器的输出端等效阻抗为大电感的条件下推导得到的,然而不同电压等级的连接线路对应不同的阻感比。一般情况下不同电压等级的线路参数如表1所示[18]。

表1 典型线路阻抗值Tab.1 Impedance values of typical line
由表1可见,在电压等级较低的线路中,阻感比相对较高,加之每个逆变器到交流母线的距离不同,线路越长,线路电阻越大,可能会导致线路电阻相对线路感抗较大,常规下垂控制已经不能满足低压微电网控制的需求,对此本文提出一种改进型PQ-fU功率耦合下垂控制策略。
2 改进型PQ-fU功率耦合下垂控制策略
2.1 PQ-fU功率耦合下垂控制原理
低压微电网中,线路阻抗的影响已经不能完全忽视,有功功率和无功功率对电压和频率的调节存在耦合关系[19]。微电网系统中单台逆变器到交流母线的功率传输示意图和相量图见图2。其中,θ为线路的阻抗角;Z∠θ为逆变器输出阻抗;U∠0°为逆变器输出电压;E∠-δ为微电网交流母线电压,δ为功角。
逆变电源输出的有功功率和无功功率可以写为:


图2 微电源到交流母线的功率传输示意图和相量图Fig.2 Schematic diagram and phasor diagram of power transfer from microsource to AC bus
假设功角 δ很小,sinδ≈δ,cosδ≈1,令:

则由式(2)、(3)可导出:
由式(5)和式(6)可知,功角 δ和电压幅值需通过P、Q的耦合调节来控制。根据上述原理可推出考虑阻感比的通用下垂控制表达式:

其中,r为线路阻感比,r=R/X;Pref和 Qref分别为有功功率和无功功率参考值。由上可知通过调节系数kp、kq、r即可对逆变器输出的频率和电压幅值的变动进行补偿。当r=0时,式(7)即为常规下垂控制。由此可得如图3所示的有功功率和无功功率耦合的PQ-fU下垂控制框图。
上述PQ-fU功率耦合下垂控制考虑了低压微电网输电线路呈阻感特性的情况,通过有功功率和无功功率耦合调节以实现对低压微电网电能质量的有效控制,较常规下垂控制降低了对线路参数的敏感性,更符合微电网中阻性占优的情况。此外控制系统会自动跟踪参考功率,并进一步基于标准的电压和频率的额定值进行自动控制,以维持逆变器输出电压和频率稳定。

图3 PQ-fU下垂控制框图Fig.3 Block diagram of PQ-fU droop control
2.2 改进型PQ-fU多环控制策略
为实现对低压微电网电能质量更有效控制,本文设计了一种改进型分布式电源并网逆变器PQ-fU多环控制策略,其控制框图如图4所示。图中外环采用上述PQ-fU功率耦合下垂控制,图中可调增益参数r体现了阻感比的影响。由于PQ-fU耦合下垂控制综合了有功和无功的偏差,因此在线路阻感比较高时仍然能对频率和电压进行有效控制;其输入量中功率参考值(Pref和Qref)通常可根据上层中央控制器下达的优化调度指令实时进行调整,对应为该被控分布式电源在调度时段的最优出力。在内环控制的设计中,鉴于电压环若采用传统的比例积分(PI)控制通常存在无法消除系统输出电压的稳态误差的问题,在此将系统中的电压环控制改进为比例复数积分(PCI)控制[20],以实现电压的零稳态误差控制,同时系统还能具有较快的动态响应性能[21]。通过内环控制器调节输出urabc作为逆变器交流侧输出电压的参考给定值,与三角载波比较产生PWM波用于控制开关器件的开通和关断,从而控制逆变器交流侧的输出电压。内环控制器有利于提高分布式电源输出电能质量、减少谐波以及降低不对称负荷和扰动对系统的影响,增加系统的鲁棒性。

图4 改进型PQ-fU多环控制框图Fig.4 Block diagram of improved PQ-fU multi-loop control
改进型PQ-fU多环控制策略中的内环采用如图5所示的电压电流双闭环控制,其中u*abc(s)为功率外环给定的交流电压参考值;Gu(s)为电压环控制器;Gi(s)为电流环控制器;KPWM为逆变器等效增益,KPWM=Udc/2;Lf、Cf分别为滤波电感和滤波电容;uabc(s)为逆变器输出电压。

图5 电压电流双闭环控制框图Fig.5 Block diagram of dual voltage and current close-loop control
由图5可得:

其中,B=Lf;C=Cf;K=Gi(s)KPWM。由式(8)可得电压闭环的传递函数:

式(9)中电压环采用PCI控制器,即:

将式(10)代入式(9)得:

其中,E1=Kkup;E0=Kkui-jKω0kup;F3=BC;F2=KC-jω0BC;F1=1+Kkup-jω0KC;F0=Kkui-jω0-jω0Kkup。参数 kui、kup取不同数值时,传递函数 H(jω)的幅频特性如图6所示。
由图6可知当被控对象为交流量且交流频率ω=ω0时,一定有即 uabc(s)=说明改进型PQ-fU多环控制的内环控制可实现零稳态误差跟踪功率外环输出的电压参考值。
通过采用上述改进型分布式电源并网逆变器PQ-fU多环控制策略,不仅在低压微电网孤岛运行时可实现对电能质量的有效控制,而且由于PQ-fU功率耦合下垂控制还可同时对上层中央控制器能量管理优化系统下达的功率参考指令进行实时跟踪,这样既能在微电网并网时实现常规的PQ控制功能,使得分布式发电单元输出中央控制器指定的有功和无功功率,又能在微电网孤岛运行时实现微电网系统级的各分布式电源功率的优化分配。因此该控制策略可适用于并网/孤岛2种运行模式,避免了在微电网运行模式发生改变时必须切换逆变器控制模式的问题,同时还能实现微电网系统优化调度功能。

图6 传递函数H(jω)的幅频特性Fig.6 Frequency-amplitude characteristics of H(jω)
3 应用分析
为了验证上述改进型PQ-fU多环控制策略的有效性,以2台逆变器并联运行系统为例(结构示意图如图7所示)进行对比分析。采用理想直流源来模拟微电源,且假设逆变器2到交流母线的距离是逆变器1到交流母线距离的1.5倍来模拟实际线路,其他参数均相同,系统参数如下:UDC=700 V,f=50 Hz,fs=10 kHz,Pload=10 kW, Qload=3 kvar,Cf=9.9 μF,Lf=3 mH,R1+jX1=0.064 2+j0.0083 Ω。

图7 2台逆变器并联运行的结构示意图Fig.7 Schematic diagram of two inverters operating in parallel
图7中逆变器输出通过LC滤波器滤除高次谐波。图中,R1、R2分别为2台逆变器的输出电阻和线路电阻之和;X1、X2分别为2台逆变器的输出感抗和线路感抗之和;Z1为负载值。
3.1 改进型PQ-fU功率耦合下垂控制与常规下垂控制结果对比
图8为逆变器输出阻抗呈阻感特性时,分别采用常规下垂控制与改进型PQ-fU功率耦合下垂控制逆变器输出频率、电压幅值的对比图。由图8(a)可知,采用常规下垂控制时频率在1 s左右开始偏离额定值呈振荡趋势,而采用改进型PQ-fU功率耦合下垂控制时频率则更加稳定,偏离量在±0.1Hz以内,满足系统对频率的要求;由图8(b)可知,采用常规下垂控制时电压幅值在0.8s左右呈振荡趋势,逐渐偏离额定电压的幅值311 V,而采用改进型PQ-fU功率耦合下垂控制时电压则一直稳定在311 V左右。可见改进型PQ-fU功率耦合下垂控制较常规下垂控制在电压和频率调节中具有更好的效果。

图8 频率和电压幅值对比图Fig.8 Comparison of frequency and voltage amplitude between two control strategies

图9 2台逆变器输出有功功率对比图Fig.9 Comparison of output active power between two inverters
图9和图10分别为逆变器输出阻抗呈阻感特性时采用常规下垂控制和改进型PQ-fU功率耦合下垂控制时2台逆变器输出有功功率和无功功率对比图。图11为采用常规下垂控制和改进型PQ-fU功率耦合下垂控制时逆变器之间的环流对比图。由图 9(a)、图 10(a)和图 11(a)可以看出,采用常规下垂控制时,逆变器有功功率、无功功率以及逆变器之间的环流均出现振荡发散现象,控制系统最终会失去稳定性,说明采用常规下垂控制在线路呈阻感特性时已经难以实现对系统的稳定控制。由图9(b)、图 10(b)和图 11(b)可知,采用改进型 PQ-fU 功率耦合下垂控制后,系统能够稳定运行,且较好地实现了有功功率和无功功率的合理分配,环流也得到了很好的抑制,仅为0.5 A。综上可见,在线路呈阻感特性时,改进型PQ-fU功率耦合下垂控制较常规下垂控制具有更好效果。

图10 2台逆变器输出无功功率对比图Fig.10 Comparison of output reactive power between two inverters

图11 环流对比图Fig.11 Comparison of circulation
3.2 改进型PQ-fU多环控制自适应跟踪效果
为验证采用改进型PQ-f U多环控制后,逆变器输出有功功率和无功功率对给定参考值的跟踪特性,本文假定在0.5 s时刻,上层能量管理优化系统下达功率指令发生了变化,逆变器1的有功功率参考值Pref1由5kW变为6kW,无功功率参考值Qref1由1.5 kvar变为1.8 kvar,逆变器2的有功功率参考值Pref2由5 kW变为4 kW,无功功率参考值Qref2由1.5 kvar变为1.2 kvar。这一过程输出的电压和频率如图12所示,2台逆变器输出的有功功率和无功功率如图13 所示。由图 12(a)可知,在 0.5 s时刻,给定参考功率发生变动时,频率虽然在0.5~0.7 s范围内波动较大,但偏离量仍维持在±0.05 Hz范围以内,满足系统稳定运行的要求。由图12(b)可知,电压幅值在给定参考功率变动时产生一个315 V的电压冲击,但该冲击电压满足电能质量要求,且经过0.1 s过渡过程后,电压又迅速恢复稳定。
图13为0.5 s时刻给定参考功率变动时,逆变器输出的有功功率和无功功率,可看出在功率参考指令变动时,采用改进型PQ-fU多环控制策略能快速、稳定地跟踪给定参考值。图14为改进型PQ-fU多环控制策略中逆变器输出电压对功率外环给定交流参考电压跟踪效果图(图中ua和uaref分别为逆变器a相输出电压和功率外环给定交流参考电压),可看出由于改进型PQ-fU多环控制策略中电压环采用了PCI控制,可实现对给定交流参考电压的快速无误差跟踪,进一步提高了系统的稳定性和动态特性。
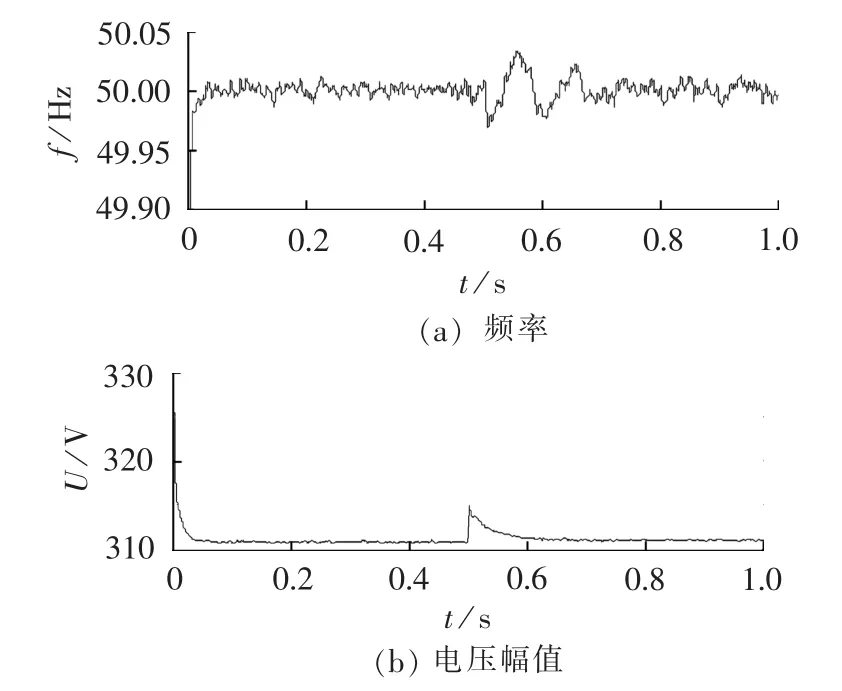
图12 系统输出的频率和电压Fig.12 Output frequency and voltage of system

图13 2台逆变器输出的有功功率和无功功率Fig.13 Output active power and reactive power of two inverters


图14 改进型PQ-fU多环控制交流电压跟踪效果Fig.14 Results of AC voltage tracing by improved PQ-fU multi-loop control
4 结论
本文首先针对常规下垂控制不适合于低压微电网线路呈阻感特性情况,对常规下垂控制进行了改进,提出一种改进型PQ-fU功率耦合下垂控制策略,并在此基础上针对微电网逆变器并联运行设计了改进型PQ-fU多环控制策略,其中电压环引入了PCI控制,实现了对功率外环给定交流参考电压的无误差跟踪。通过对比验证表明,改进型PQ-fU功率耦合下垂控制策略在线路阻感特性情况下能较好地维持系统电压和频率的稳定,此外本文设计的改进型PQ-fU多环控制策略能够对上层能量管理下达的实时优化参考指令进行跟踪,较好地解决了功率的合理分配问题,且环流较小,该控制策略避免了微电网模式切换过程中的控制策略切换,可减少微电网系统控制的复杂度。
