一种用于变电站避雷器仪表智能读数的图像处理方法
2014-10-15李汉峰谷志伟
李汉峰 谷志伟
(广西电网公司钦州供电局,广西 钦州535000)
0 引言
避雷器是变电站中一种比较常见的仪表,人工读表易受人的主观因素影响,劳动强度大,读表效率低,可靠性无法保证。避雷器仪表是一种指针式仪表,表盘中的主要对象是一条直线指针和表盘刻度。表盘刻度是均匀分布的,且表盘中只有一条指针。只要检测出指针位置,确定指针的偏转角度,就可以判断避雷器的读数。因此,利用图像识别算法进行智能读数是一种可行的处理方式。
现有的许多指针检测算法,如减影法[1]、中心投影法[2]、模板特征法[3]等,都要求图像的拍摄要在同一个平面上,并且对光照有严格要求。而变电站巡检机器人采集避雷器仪表图像是在远距离多角度的情况下进行的,况且在户外条件下不可避免地会受到光照及其他各种环境因素的影响,图像中包含大量的干扰信息,因此这些方法并不适合机器人巡检数据中避雷器仪表的指针检测。本文以巡检机器人现场拍摄图像为出发点,由于现场强烈的光线使得避雷器指针与背景表盘的区分度不明显,因此在图像预处理的过程中使用底帽变换,以减少背景光照的影响。使用概率霍夫变换(Probabilistic Hough Transform,PHT)检测表针位置,并根据避雷器指针指向特点去除杂线的干扰,确定避雷器表针的位置。通过大量现场采集的图像测试证实,本文所提出的方法对避雷器指针的检测效果较好,完全满足巡检机器人户外应用的要求。
1 仪表图像的预处理
大部分情况下变电站户外的光线较为强烈,易导致背景泛白,使得避雷器指针特征不明显。为避免这种情况,我们采用图像形态学中的底帽变换对图像进行预处理,以减少光照对图像处理的影响。
底帽变换是图像形态学中的一种组合操作,其定义为图像f的闭操作减去原图像f:

闭操作的定义为先对图像进行膨胀操作,再进行腐蚀操作:

其中,膨胀和腐蚀操作分别定义如下:

这里通过对图像处理效果进行比较,选择b为41×41的正方形结构元。
预处理的结果如图1所示,可以看到在底帽变换后指针更加清晰,表盘中的背景更加干净,减轻了光照对指针的影响。
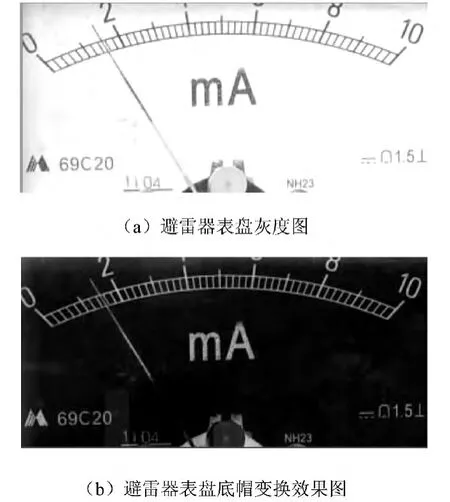
图1 对表盘进行底帽变换
2 二值化
对图像进行二值化处理就是要确定一个阈值z,然后将图像中各像素点的像素值与阈值z进行比较,如果像素点的像素值大于z则置像素点为1,否则置为0,由此可以得到一幅由白色的前景点和黑色的背景点组成的二值图像。
由上面的介绍可知,对图像进行二值化处理的关键是选取合适的阈值z,它直接影响到表针检测的结果。本文采用基于类间最大方差的大津阈值法(Otsu)[3]。大津阈值法的大体思想如下:一幅图像有m个灰度级,在灰度级k将灰度级分成[1,k]和[k+1,m]两部分。分别计算两组的概率w0、w1和组内均值μ0、μ1,以及整个图像的灰度均值μ。两组间的方差δ2用式(5)表示。

式(5)等价于式(6),即:

式中,δ2(k)为最大值时,灰度级k对应的灰度值k*,即所求的灰度阈值。
按照式(7)对图像进行阈值分割。

其中I(x,y)是阈值化以后的像素值,二值化得到的结果如图2所示。
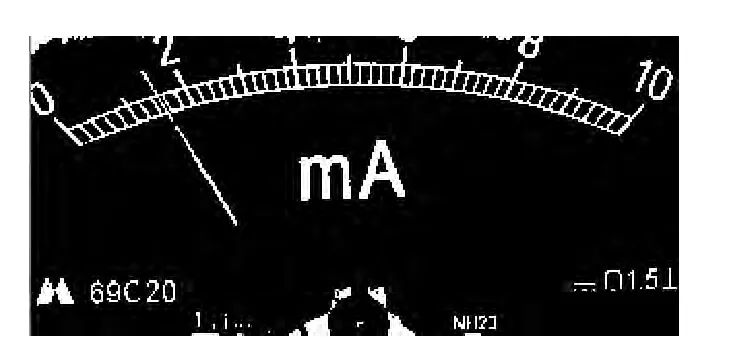
图2 二值化结果
从二值化结果图中可以看到,二值化消除了部分背景噪声,但除仪表指针外,表盘中还有字母以及其他一些不规则形状的干扰项,这些无关的内容现阶段还无法去掉,但通过后续处理我们可以逐步将干扰项排除。
3 图像的边缘检测
图像的边缘检测实质上是用某种算法来提取出图像中的对象与背景间的交界线[4]。为了让图像中的边缘更加清晰,我们在二值图像的基础上进行边缘检测。边缘检测算法有很多[5-6],如基于灰度直方图的边缘检测、基于梯度的边缘检测、Laplacan边缘检测和Canny边缘检测。图3是4种常用的边缘检测算法的检测结果。
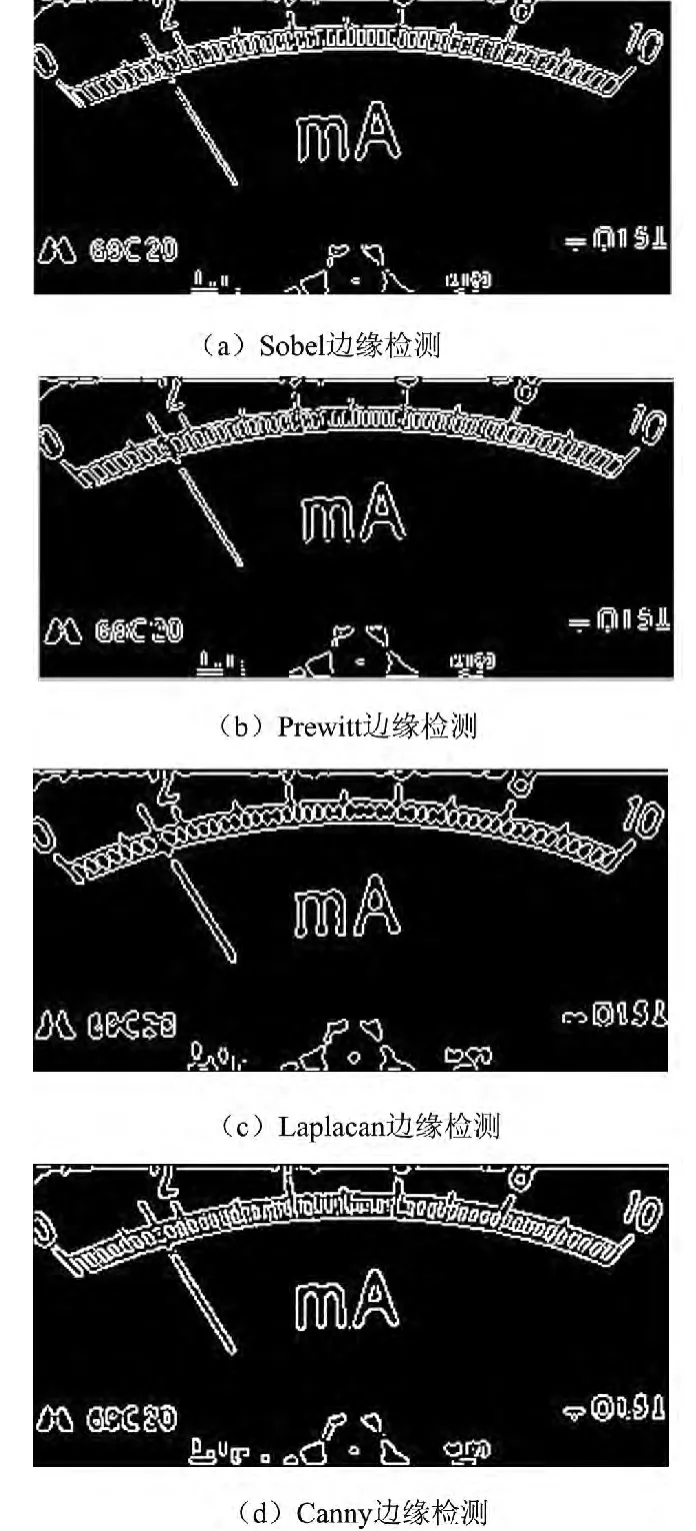
图3 4种边缘检测方法的结果
通过实验比对,本文采用的是Canny边缘检测算法。Canny边缘检测算法被认为是目前为止最为成功的边缘检测算法之一,应用十分广泛。Canny边缘检测算法首先是用高斯滤波器对图像进行滤波,抑制图像中的噪声。接着使用一阶微分算子计算图像的梯度幅值和方向,并且对最大幅值进行非极大抑制,而后通过双阈值的方法提取边缘。
4 图像的直线检测
Hough变换[7]是一种对二值图像进行直线检测的有效方法。具体到指针检测领域,它可以在指针边界存在噪声干扰或指针图像发生间断的情况下,仍具有一定的容错性和鲁棒性,是仪表指针检测的一种理想工具。其基本原理是通过变换将图像从图像空间变换到极坐标空间,图像空间中的一条直线在极坐标空间中表示为:

图像空间中的在同一条直线上的点在极坐标空间中就转换成了一组相交于某点的曲线。若能在参数空间中检测出该交点并确定其参数,就能在图像空间中找出共线点的直线方程,从而实现直线检测。
图4是Hough变换以后得到的结果,有很多不同的直线,但是避雷器指针应当满足以下几个条件:(1)避雷器指针直线必须在一个最小角度min和最大角度max的范围内;(2)以图像的中心线(此中心线根据模板图像的标定确定)为界,指针必须完全在左半区域或完全在右半区域;(3)若指针在左半区域其直线角度必须满足[min,90)的范围,若指针在右半区域其直线角度应当满足(90,max]的范围;(4)若指针的角度是90°,则指针一定在图像竖直中心线附近的一个范围内。根据以上几个条件可以过滤掉大部分直线,然后我们在剩余的直线中选取最长直线作为指针直线,如图5所示。图6表示了拟合得到的指针直线在避雷器灰度图上画出的效果。

图4 Hough变换得到的直线

图5 直线过滤得到指针
图6 结果显示
5 结语
通过对巡检机器人在户外条件下采集的巡检图像进行大量测试,证实了本文所提算法的鲁棒性。通过底帽变换对图像进行预处理可以有效地适应各种不同的光照条件。根据PHT和直线过滤条件可以快速检测到指针对应的直线,进而读出仪表读数,算法简单,易于实现,满足了巡检机器人检测实时性的要求。而且,大量巡检机器人的巡检图片验证,在此图像处理算法下,对避雷器仪表正确读数的概率在96.5%以上,完全满足巡检机器人对避雷器指针检测的精度要求。
[1]何智杰,张彬,金连文.高精度指针仪表自动读数识别方法[J].计算机辅助工程,2006,15(3):9~12
[2]陈彬,金连文.一种仪表指针位置检测的中心投影法[J].计算机应用研究,2005(1):246~248
[3]HULL R,ZHOU G.A frame work for supporting data integration usin g the materialized and virtual approaches[A].Proc of ACM SIGMOD International Conference on Management of Data[C],1996
[4]汪海洋,潘德炉,夏德深.二维Otsu自适应阈值选取算法的快速实现[J].自动化学报,2007,33(9):968~971
[5]段瑞玲,李庆祥,李玉和.图像边缘检测方法研究综述[J].光学技术,2005,33(3):415~419
[6]Marr D C,Hildreth E.Theory of Edge Detection[M].London:Proc.Roy.Soc,1980
[7]孙丰荣,刘积仁.快速霍夫变换算法[J].计算机学报,2001,24(10):1 102~1 109