基于动态识别区间的路面识别方法研究
2014-10-13张晓龙孙仁云李锋林小龙
张晓龙,孙仁云,李锋,林小龙
(西华大学交通与汽车工程学院,四川成都610039)
基于动态识别区间的路面识别方法研究
张晓龙,孙仁云,李锋,林小龙
(西华大学交通与汽车工程学院,四川成都610039)
以路面附着系数为参数指标,在Burckhardt轮胎—路面数学模型的基础上设计了7种典型路面的动态识别区间,同时根据附着系数和附着系数曲线斜率之差对干鹅卵石和湿沥青路面作进一步区分,据此在制动时完成路面状态的动态识别。使用双轮模型进行仿真试验,结果表明:该方法能够准确快速地完成路面状态识别,实现了实时滑移率下的动态识别,对不同路面附着条件的利用明显改善,同时该方法具备自动纠错功能。
路面识别;附着系数;动态识别;识别区间
要使车辆在制动时能够充分利用当前路面的附着条件,需要把车轮实时的滑移率调整到当前路面的最佳滑移率。而不同路面的最佳滑移率往往不同,这就需要在制动过程中对当前路面的状态进行识别,同时将当前路面的最佳滑移率作为ABS系统控制的目标滑移率。
目前国内外关于路面识别的研究很多。有通过μ(s)曲线斜率进行识别的方法,但需要的数据量大,系统的实时性不强[1-2];有通过传感器对路面参数进行测量的识别方法[3],识别准确,但硬件成本较高;有通过路面状态特征值进行识别的方法[4],识别准确率高,但是对跃变路面的识别存在局限性。还有一些运用卡尔曼滤波、模型估算等方法进行识别[5]。
笔者提出一种在实时滑移率下进行动态识别的方法,以路面附着系数为参数指标,在Burck⁃hardt轮胎—路面数学模型的基础上设计7种典型路面的动态识别区间,同时根据附着系数和附着系数曲线斜率之差对干鹅卵石和湿沥青路面作进一步区分,实现7种典型路面的动态识别,最后通过仿真实验验证了该方法的可行性。
1 车辆动力学模型
为了简化问题,只考虑车辆的纵向运动,假设路面平直,采用双轮车辆模型(图1)进行分析。式(1)为整车运动方程,式(2)~(3)分别是前、后轮运动方程。
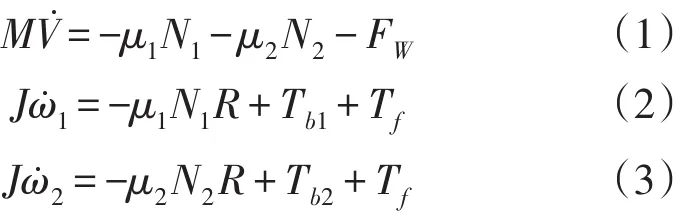
图1 双轮车辆模型
式中:M为整车质量;V̇为车辆的加速度;μ为路面附着系数;N1、N1分别是前、后轮受到来自地面的法向作用力;J为车轮的转动惯量;R为车轮的滚动半径;ω̇1、ω̇2分别是前、后车轮角减速度;Tb1、Tb2分别是前、后车轮的制动力矩;FW为空气阻力[6]。
2 轮胎模型
Burckhardt等人通过大量试验拟合出了7种典型路面的μ(s)(附着系数—滑移率)曲线,给出了一个实用的轮胎—路面数学模型,在汽车动力学研究中应用广泛。其表达式如式(4)所示[7]:

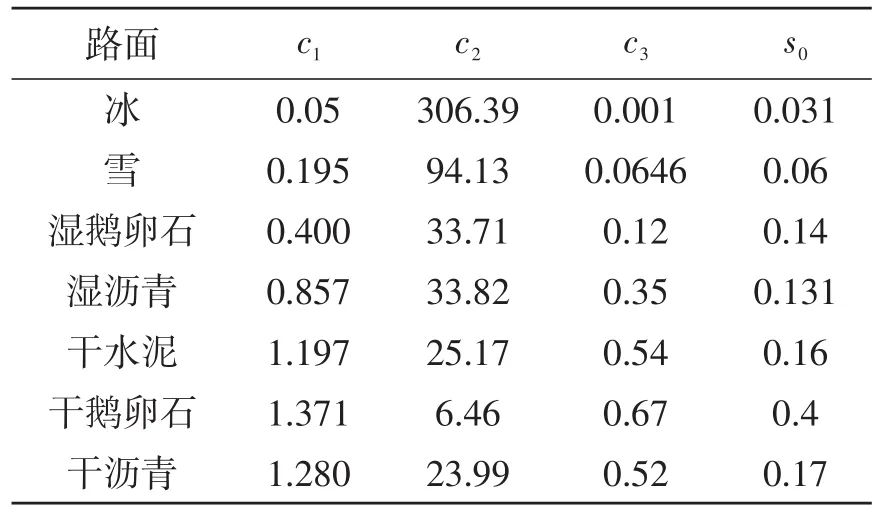
表1 轮胎模型中各典型路面参数值及最佳滑移率
式中:c1、c2、c3为各典型路面的参数值,如表1所示。通过求极值的方法得到7种典型路面的最佳滑移率s0,见表1。
根据表1中不同路面下c1、c2、c3的值得到7种典型路面的 μ(s)曲线,如图2所示,仿真时利用此模型产生路面信号。
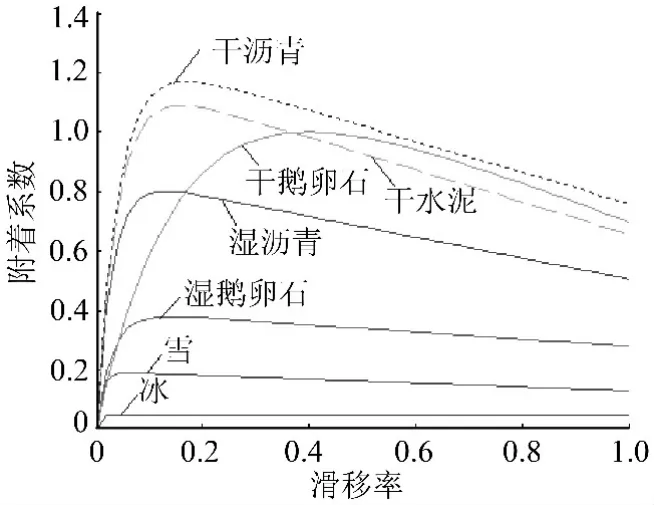
图2 7种典型路面的μ(s)曲线
3 路面状态动态识别方法
观察图2可以看出,各典型路面的附着系数曲线出现交叉重叠,个别滑移率下不同路面的附着系数出现相等。如果以附着系数为识别参数,只有当不同路面的附着系数差距明显时才能完成路面的识别,不能在整个滑移率区间上进行识别,给识别带来不便。
仔细分析不难看出各典型路面的附着系数曲线出现交叉重叠主要是由干鹅卵石路面造成的,如果去掉这条曲线,如图3所示,其余6种路面的附着系数曲线差距明显,易于识别,鉴于此,笔者将干鹅卵石路面与其他路面区分开进行路面识别。
3.1建立动态识别区间
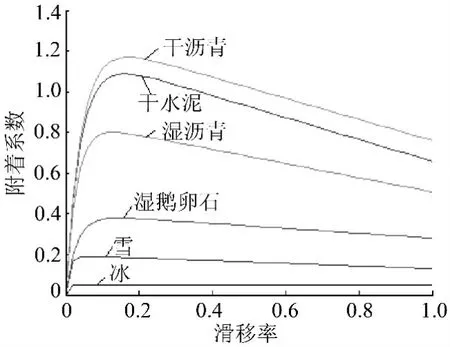
图3 6种典型路面的μ(s)曲线
如图3所示,其余6种路面的附着系数曲线没有出现交叉重叠,同时考虑到干沥青、干水泥路面特性相似,可合二为一。以附着系数为参数指标,在每个滑移率下都有一个对应的识别区间,即可实现路面状态的动态识别。
识别区间随着滑移率的变化而变化,这样便得到5条识别区间曲线,如图4所示,其定义见式(5)~(6):
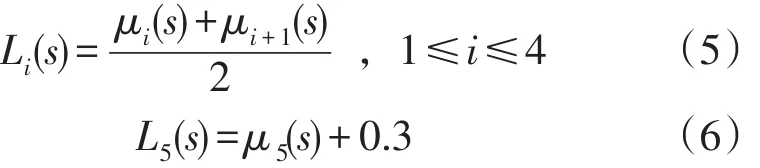
式中:μi(s)为5种典型路面的附着系数曲线,路面编号如表2所示。
由式(4)~(6)和表1中的参数值可以计算出各典型路面实时滑移率下对应的识别区间,即可得到典型路面的动态识别区间,如表2所示。
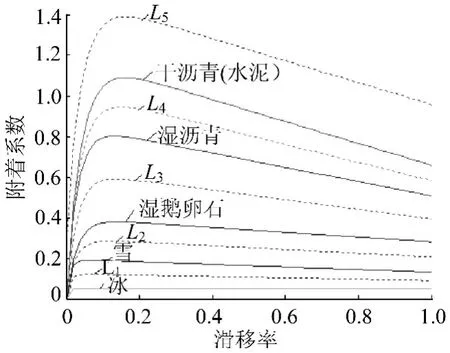
图4 6种典型路面的识别区间—滑移率曲线
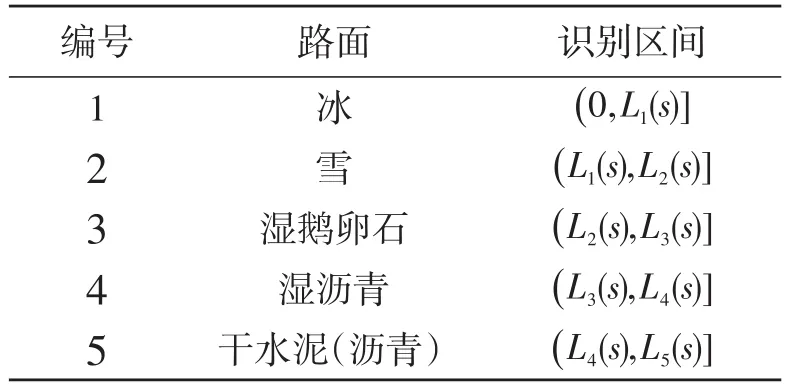
表2 典型路面动态识别区间
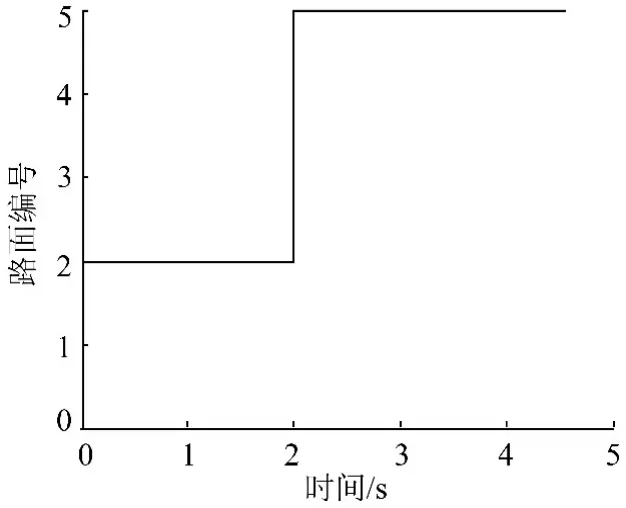
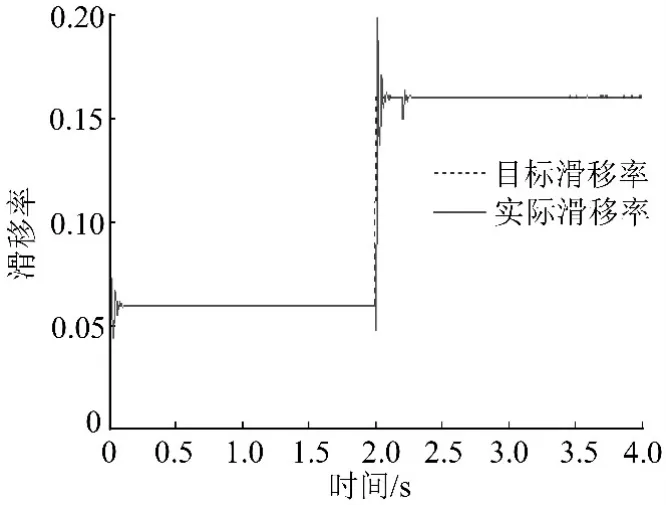
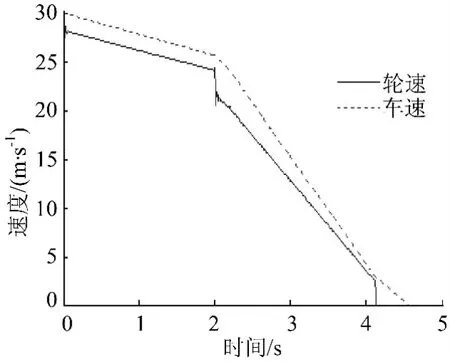
3.2干鹅卵石路面的识别
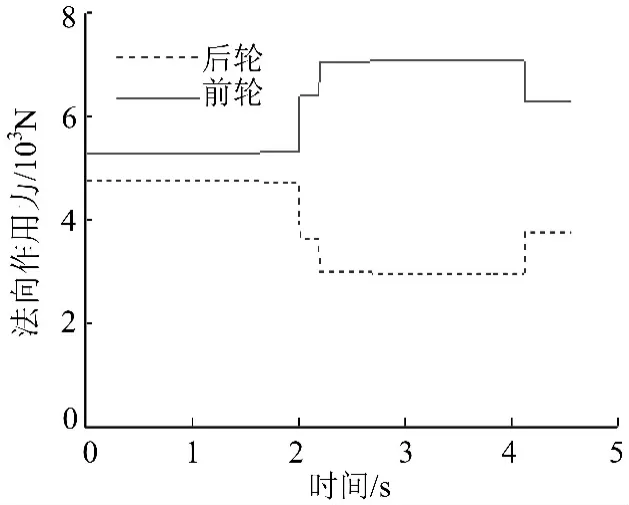
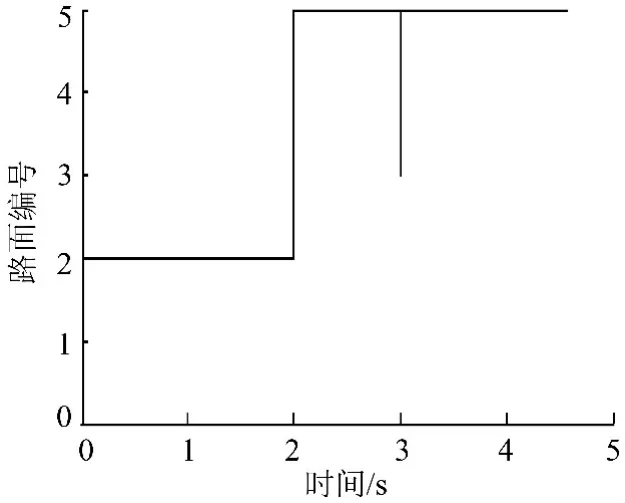
如图5所示,当0.1 图5 2种典型路面的识别区间—滑移率曲线 对式(4)求微分得 令 则 如果当前路面为干鹅卵石,c1、c2、c3分别为1.371、6.46、0.67,在滑移率区间[0.1,0.2]上,c(s)恒小于0。同理,如果当前路面为湿沥青,在滑移率区间[0.1,0.2]上,c(s)恒大于0。 因此,如果系统根据动态识别区间识别出当前路面为路面4,可根据当前路面的c(s)对干鹅卵石和湿沥青路面作进一步区分。如果c(s)不小于0,则当前路面为湿沥青路面,否则,当前路面为干鹅卵石路面。 3.3识别过程 考虑到汽车大部分时间行驶在干沥青(水泥)路面,将系统的目标滑移率的初始值设为0.16,即默认当前路面为干沥青(水泥)路面。制动开始后,实际滑移率立即从0向0.16快速递增,系统实时估算当前路面实时滑移率下的附着系数,同时判断其落入哪个识别区间。如果识别结果不是湿沥青路面,系统将识别路面的最佳滑移率作为目标滑移率,同时系统继续将当前路面的附着系数与识别区间进行比较,一旦路面发生跃变或前一刻的识别出现错误,下一时刻立即作出调整。 如果识别结果为湿沥青路面,则表示当前路面是湿沥青和干鹅卵石路面中的一种,系统开始估算当前路面的c(s),如果c(s)小于0,说明当前路面为干鹅卵石,目标滑移率调整为0.4;如果c(s)不小于0,说明当前路面为湿沥青,目标滑移率调整为0.131。同时在新的滑移率下对当前路面进行实时识别。 在双轮车辆模型的基础上,以30m·s-1的初速度在典型路面上进行制动仿真试验。 制动开始时预设路面为路面2,2s后跃变为路面5。如图6所示,路面识别仿真结果与预设路面一致,由于该方法能在实时滑移率下实现动态识别,识别快速准确。 图6 路面识别仿真结果 图7 滑移率—制动时间曲线 图8 速度—时间曲线 图9 法向作用力—时间曲线 图10 导入误差后的识别仿真结果 图7为前轮的滑移率—时间曲线,2s时路面状态发生变化,完成识别后目标滑移率及时调整,实际滑移率对目标滑移率的跟踪快速准确,控制效果良好。 图8为速度—时间曲线,当车速小于3m·s-1后,ABS系统停止工作,轮速迅速减小,4.15 s时车轮抱死,4.57s时制动完成。在ABS系统工作过程中,车轮没有出现抱死,充分利用了当前路面的附着条件,缩短了制动时间,制动效果良好。 如图9所示,当路面发生跃变后,由于路面附着条件改善,制动强度增大,载荷转移加剧,前轮受到的法向作用力增大,后轮受到的法向作用力减小。 图10为导入误差后的识别仿真结果,在3 s时给系统导入误差,错误识别出当前路面为路面3,由于该方法能够在实时滑移率下实现动态识别,下一时刻立即纠正了前一时刻的错误,可见该方法具备自动纠错功能。 以路面附着系数作为参数指标,设计了7种典型路面的动态识别区间,实现了在实时滑移率下对当前路面进行动态识别,一旦路面发生跃变或出现错误识别,下一时刻会立即作出调整,系统具备自动纠错功能。以附着系数与斜率之差对湿沥青和干鹅卵石路面作进一步区分,消除了干鹅卵石路面与其他路面的附着系数曲线交叉重叠对动态识别的干扰,增强了该方法的适应性。 [1]Fredrik Gutafsson.Slip-based Tire-road Friction Estima⁃tion[J].Auromaricu,1997,33:1087-1099. [2]Hideo Sado,Shin-ichiro Sakai,YoichiHori.Road Condi⁃tion Estimation for Traction Control in Electric Vehicle[C].IEEE International Symposium on Industrial Elec⁃tronics,1999:973-978. [3]宋健,杨财,李红志,等.AYC系统基于多传感器数据融合的路面附着系数估计算法[J].清华大学学报,2009(5):101-104. [4]王博,孙仁云.基于状态特征因子的路面识别方法研究[J].汽车工程,2012,34(6):506-510. [5]Mara Tanelli,Luigi Piroddi,Marco Piuri,etal.Real-time identification of tire-road friction conditions[C]//17th IEEE International Conference on Control Applications,2008. [6]余志生.汽车理论[M].4版.北京:机械工业出版社,2008. [7]Burckhardt M.Fahrwerktechnik.Radschlupf-Regelsys⁃teme[M].VogelVerlag,1993. Research on Road Identification Based on Dynam ic Identification Interval Zhang Xiaolong,Sun Renyun,LiFeng,Lin Xiaolong Dynamic identification intervals of seven typical roadswere designed with the road adhesion coefficientasparameter index in themathematical tyre-roadmodelof Burckhardt,and the roadsofdrypebble and wet-asphaltwere distinguished according to the D-value of road adhesion coefficientand its corresponding gradient to complete dynamic identification of road condition during braking.Simulation tests based on the double-wheelmodelwere conducted.The results show that thismethod can achieve road identification accurately and quickly,a dynamic recognition under real-time slip ratio,and im⁃proves theutilization ofadhesion conditionsofdifferent roads,has the function ofself-correction. road identification;adhesion coefficient;dynamic identification;identification interval 10.3969/j.issn.1008-5483.2014.03.004 U461.5 A 1008-5483(2014)03-0021-04 2014-06-28 四川省科技厅应用基础项目(2012JY0049);西华大学人才培养与引进基金项目(R0920301) 张晓龙(1988-),男,陕西蒲城人,硕士,主要从事汽车电控技术研究。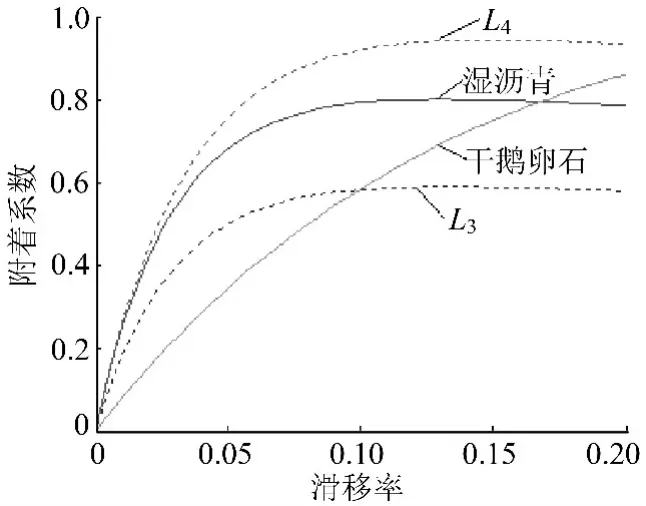



4 仿真试验
5 结论
(Schoolof Transportation and Automobile Engineering,Xihua University,Chengdu 610039,China)
