主动四轮转向汽车最优控制及闭环操纵性仿真*
2014-10-11闫光辉
杜 峰,闫光辉,,魏 朗,陈 涛
(1.天津职业技术师范大学汽车与交通学院,天津 300222;2.长安大学汽车学院,西安 710064)
前言
传统的四轮转向(four-wheel steering,4WS)汽车其前轮转角由驾驶员控制,后轮转角由控制器指令所决定,通常只能控制一个状态变量,即汽车质心侧偏角或横摆角速度,属于单输入单输出控制类型,目前实用化的4WS汽车大部分都属此类[1-2]。由于这种后轮主动转向汽车仅有一个控制输入,决定了它对汽车操纵稳定性的提高有限,文献[3]中也指出,仅靠后轮主动转向,很难同时实现对汽车侧偏角和横摆角速度的满意控制。
如今,利用先进的线控转向技术使得汽车的前、后轮都能主动转向,更易于实现汽车驾驶的智能辅助操作[4-5]。由于这种全主动4WS汽车具有两个被控变量(前轮和后轮转角),因此这种控制方案可同时独立地控制汽车的两个状态变量:横摆角速度和质心侧偏角,显然这是一双输入双输出控制系统,所以相对于传统的4WS汽车,全主动4WS技术对于车辆操纵稳定性的改善将会更加显著。
全主动4WS技术的核心即是四轮主动转向控制器的开发。文献[6]中提出了一种利用外转子式轮毂电机驱动的线控4WS机构,可实现四轮驱动电动汽车绕任一点进行旋转,并沿任一方向进行平移的功能。文献[7]中针对线控4WS汽车,分别采用了前馈控制和反馈控制的后轮转角控制策略。文献[8]和文献[9]中研究了对汽车前、后轮均采用横摆角速度反馈的4WS控制策略。这些研究表明,对后轮进行横摆角速度反馈可减小质心侧偏角稳态值,控制车辆姿态;对前轮进行横摆角速度反馈可改善横摆角速度的响应特性,保持固定转向增益,减轻驾驶员负担。
本文中采用最优控制来进行主动4WS控制器的设计,该控制器由转向盘转角与理想车辆状态组成两个前馈环节,由车辆状态跟踪误差组成反馈环节,来实现对汽车操纵稳定性的改善。考虑到驾驶员对汽车的行驶特性具有重要的影响,对汽车转向特性进行分析时,在“驾驶员-汽车-道路”闭环系统内进行操纵性评价将会更加合理,而对车辆操纵性改善效果的验证也更具实际意义[10]。因此,本文中采用闭环操纵系统来进行所设计控制器控制效果的仿真验证。
1 主动四轮转向汽车最优控制器设计
1.1 四轮转向汽车横向动力学模型
对于进行控制算法研究的车辆操纵稳定性模型,大多采用线性2自由度模型。理论和实验都证明,在正常车速范围的非紧急状态和小转向角的情况下,该模型能以较好的精度表征车辆转向的实际物理过程,据此设计的控制器能够正常工作[11]。
4WS汽车线性2自由度动力学微分方程为
式中:m为整车质量;β为质心侧偏角;vx为汽车质心纵向速度分量;vy为汽车质心侧向速度分量;r为横摆角速度;Iz为绕质心的横摆转动惯量;kf、kr分别为前、后轮等效侧偏刚度(两侧轮胎之和);a、b分别为质心至前、后轴距离;δf和 δr分别为汽车前、后轮转角。
将式(1)转化为状态方程:
其中:
1.2 车辆理想转向模型
对于传统4WS汽车,当附加了后轮转角之后,车辆本身的横摆角速度稳态增益(转向灵敏度)将随车速和前轮转角发生较大幅度的变化,这增加了驾驶的难度,在高速时也增加了驾驶员的疲劳程度[12]。因此,为了保证4WS汽车转向时横摆角速度稳态增益与传统的前轮转向(front-wheel steering,FWS)汽车相同,即要保持驾驶员的驾驶感觉不发生较大的变化,同时使质心侧偏角尽量为零,以保持转向时良好的车身姿态,可构造车辆理想转向模型[13]:
其中:
1.3 主动四轮转向汽车最优控制器设计
控制目标是期望转向过程中被控4WS汽车的转向响应能够跟踪理想车辆模型的状态变量,使二者状态跟踪误差e为最小。定义状态跟踪误差为
由式(2)和式(3)可得
控制系统设计目标是寻求4WS汽车最优的前、后轮转角δf与δr,使下述性能指标G为极小值:
式中:Q、R为对角加权矩阵,Q为半正定矩阵,R为正定矩阵。二者相应元素的大小分别表示了对车身侧偏角β、横摆角速度r和控制变量(前、后轮转角δf和δr)重视的程度。性能指标G中积分第2项是对控制总能量的限制,对于4WS系统即限制前、后轮转角的大小。求解该线性二次型最优控制问题,最终可得
若令:
则有
式中:正定对称矩阵P为代数Riccati方程的解;kl和km为2×2维系数矩阵;kn为2×1维系数矩阵。
该最优控制器是一个双输入双输出的控制器,其输入为汽车的两个反馈状态变量:质心侧偏角β和横摆角速度r,其输出为被控的汽车前轮转角δf和后轮转角δr。该最优控制的实质是:驾驶员按照正常驾驶FWS汽车的方式,根据实际道路情况和车辆运动响应的反馈信息,对主动4WS汽车转向盘进行操作,该转向盘转角通过转向传动比转换为前轮转角δ*f;主动4WS最优控制器以理想车辆模型前轮转角δ*f作为参考输入,以跟踪理想车辆模型状态为目标,利用最优控制算法计算车辆实际需要的前、后轮转角δf与δr,以完成转向过程的横摆角速度跟踪任务,同时尽量减小车辆质心侧偏角。
2 主动四轮转向汽车闭环操纵系统
2.1 驾驶员模型
采用郭孔辉教授提出的“单点预瞄最优曲率”驾驶员模型[14]。该模型具有跟随效果好、物理概念清晰,适用于大角度转向和非线性汽车模型仿真的特点。
2.2 “人-车-路”闭环操纵系统
综合上述的驾驶员模型、主动4WS最优控制器和2自由度汽车动力学模型,可以形成一闭环的“人-车-路”操纵动力学系统(见图1)。系统的输入为前方道路信息f(t),输出为汽车的侧向位移y(t),它反映了汽车跟踪道路轨迹的精度。
由于闭环系统把驾驶员、汽车和路面作为一个统一的整体来研究,驾驶员在行驶中会根据道路条件和汽车行驶状态等反馈信息适时地作出判断,修正对转向盘的操作,因而进行车辆的闭环操纵性仿真分析将更能真实地反映汽车的实际行驶情况。
2.3 闭环操纵系统安全性评价指标
为了解在最优控制作用下,4WS汽车的操纵性和安全性改善情况,采用文献[15]中提出的轨道总方差JE和综合总方差JT作为评价指标来对最优控制下的主动4WS汽车闭环操纵系统进行定量评价。其中:JE表示了“人-车”系统跟随预期路径的精度,这是保证行车安全最重要的一项指标;而综合总方差JT则是对整个操纵系统主动安全性水平的综合反映。
3 仿真验证
3.1 标准双移线轨迹
在汽车操纵性闭环研究中,双移线试验是最典型的测试方法,它模拟了汽车超车或紧急避障后,随之快速返回正确车道的能力,此试验对评价实际行驶条件下的“人-车-路”闭环系统非常重要。对于双移线试验,若采取同样驾驶员特性参数和汽车结构参数,则可以被用来进行不同辅助控制方式的闭环性能对比。
ISO/TR3888规定的标准紧急双移线试验轨迹(见图2)可采用文献[16]中给出的分段函数描述。
3.2 车辆双移线仿真分析
可利用Simulink软件对控制系统和车辆动力学系统进行建模仿真,仿真时汽车纵向速度为恒值。车辆主要参数[17]为:m=1 359.8kg,a=1.063m,b=1.485m,Iz=1 992.54kg·m2,kf=52 480N/rad,kr=88 416N/rad。为了对比控制效果,同时进行了相同结构参数的FWS汽车和前后轮转角成比例的4WS汽车的闭环系统仿真,其中比例控制的4WS汽车可保证稳态时汽车的质心侧偏角接近于0。
根据文献[18]的推荐值,仿真中驾驶员神经反应滞后时间 Td取0.2s,操纵反应滞后时间 Th取0.1s,驾驶员预瞄时间T取1.0s,而跟随阶数α取0.5时能够兼顾跟随精度与阻尼,可获得较佳效果。
通过反复仿真验证和对比,在确定取得较好控制效果的要求下,取最优控制加权矩阵Q、R为
则4WS最优控制系统各增益值计算如下:
图3为在车道变换过程中汽车的质心侧偏角和横摆角速度变化趋势。由图3(a)可以看出,最优控制4WS汽车的质心侧偏角幅值最小,始终接近于0,表明在整个移线过程中,最优控制4WS汽车的车身姿态保持得最好;而无控制的FWS汽车质心侧偏角幅值最大,且随汽车行驶方向的改变,其波动也较剧烈;比例控制的4WS汽车质心侧偏角大小则介于二者之间。图3(b)表明最优控制与比例控制4WS汽车都能较好地跟踪FWS汽车的横摆角速度,即驾驶员的驾驶感觉不会发生较大的变化。以上分析表明:所设计的4WS最优控制器达到了减小汽车质心侧偏角并同时跟踪期望横摆角速度的操纵性改善目标。
图4为汽车分别以50和100km/h行驶的双移线仿真轨迹。由图4(a)可以看出,汽车以中速50km/h进行车道变换时,3种控制方式的轨道跟踪精度几乎完全一致,3种车辆行驶轨迹基本完全重合。这表明在较低车速下,3种汽车对转向输入指令的动态响应都较快。由图4(b)可以看出,当车辆以高速100km/h进行双移线行驶时,最优控制主动4WS汽车的路径跟踪精度要明显优于其它两种汽车,更贴近于标准路线。虽然在第2次换道时路径偏差较大(仍小于0.3m),但却能更快地返回正确车道。这表明,在高速紧急避让情况下,全主动4WS汽车具有比传统FWS汽车和比例控制4WS汽车更好的轨道跟踪性能,车辆恢复稳定的时间也有所缩短,表明了其安全性能相对传统FWS汽车和比例控制4WS汽车有所改善。
3.3 双移线仿真安全性评价指标计算
3种控制方式下汽车双移线仿真的主动安全性评价指标计算值见表1。
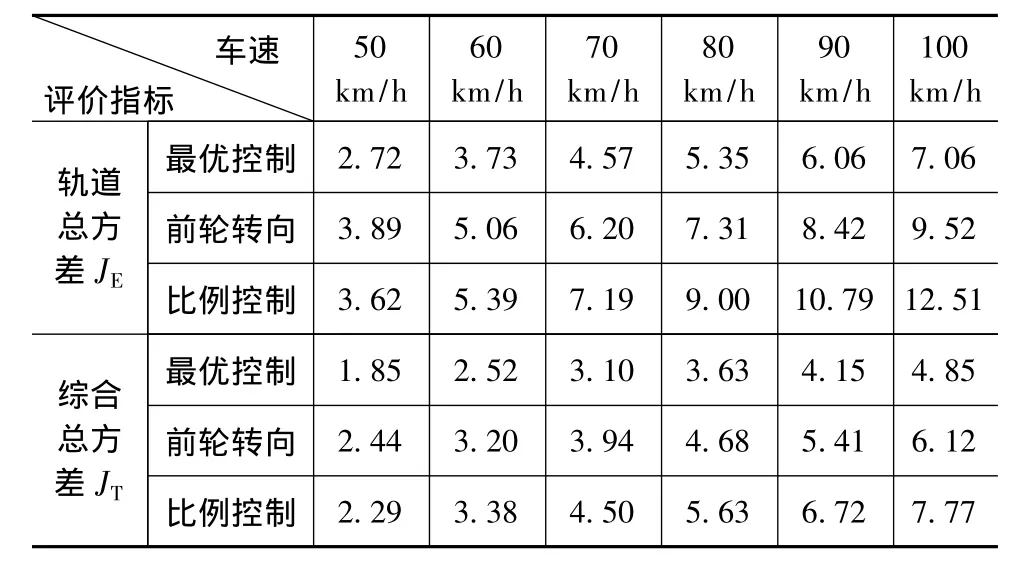
表1 闭环操纵系统主动安全性评价指标
由表1可以看出:从中速到高速最优控制主动4WS汽车的轨道总方差JE始终小于其它两种控制方式,表明其在道路轨迹跟随精度上具有明显的优势,降低了紧急避障或移线换道时车辆发生碰撞的几率。
根据总评价指标—加权综合总方差JT的计算结果也可看出:无论从中速到高速,最优控制4WS汽车的主动安全性综合评价指标JT始终小于其它两种车型,且在高速时更加明显。因此,依据这种定量分析也可以得出:最优控制主动4WS系统对车辆的移线变道操作具有明显的辅助改善作用,提高了车辆高速行驶的主动安全性。
4 结论
通过双移线仿真和安全性评价表明:所设计的主动4WS最优控制器对汽车高速行驶下的转向操作具有辅助安全的作用,在减小转向时车体质心侧偏角的同时,也保证了主动4WS汽车转向灵敏度与传统FWS汽车的一致性,使汽车具有更好的路径跟踪精度和转向姿态,改善了车辆高速行驶下的操纵稳定性和行驶安全性。
[1] Abe M.Vehicle Dynamics and Control for Improving Handling and Active Safety:From Four-wheel-steering to Direct Yaw Moment Control[J].Proc.IMechE.Part K:J.Automobile Engineering,2009,213:87 -101.
[2] 陈祯福.汽车底盘控制技术的现状和发展趋势[J].汽车工程,2006,28(2):105 -113.
[3] Westbom Daniel,Frejinger Petter.Yaw Control Using Rear Wheel Steering[C].Regnr:iTH-ISY-EX-3273,Linkoping,2002.
[4] 商高高,洪泽,何仁.基于稳态增益的主动转向系统可变传动比模型[J].江苏大学学报(自然科学版),2010,31(3):278 -282.
[5] Frede Daniel,Khodabakhshian Mohammad,Malmquist Daniel.A State-of-the-art Survey on Vehicular Mechatronics Focusing on Bywire Systems[R].Trita MMK,2010.
[6] 卓桂荣,陈辛波,余卓平,等.全方位线控四轮转向电动汽车设计[J].机械设计,2005,22(2):29 -31.
[7] 田承伟,宗长富,何磊,等.汽车线控四轮转向控制策略[J].吉林大学学报(工学版),2010,40(5):1177 -1182.
[8] 施国标,于蕾艳,林逸.四轮线控转向横摆角速度反馈控制策略研究系统[J].系统仿真学报,2008,20(2):506 -508.
[9] 于蕾艳,林逸,施国标.四轮线控转向系统的转向控制策略研究[J].计算机仿真,2008,25(4):278 -281.
[10] 宗长富,郭孔辉.汽车操纵稳定性的研究与评价[J].汽车技术,2000(6):6 -11.
[11] Dirk E S,Jone M S.Effect of Model Complexity on the Performance of Automated Vehicle Steering Controllers:Model Development,Validation and Comparison[J].Vehicle System Dynamics,1995,24(2):163 -181.
[12] 郭孔辉,轧浩.车辆四轮转向系统的控制方法[J].吉林工业大学学报,1998,28(4):1 -4.
[13] 祁永宁,陈南,李普.四轮转向车辆的直接横摆力矩控制[J].东南大学学报(自然科学版),2004,34(4):451 -454.
[14] 郭孔辉.预瞄跟随理论与人-车闭环系统大角度操纵运动仿真[J].汽车工程,1992,14(1):1 -11.
[15] 郭孔辉.人-车-路闭环操纵系统主动安全性的综合评价与优化设计[J].汽车技术,1993(4):4 -12.
[16] Feve Sebastien,Huret Alexandre.Vehicle Steering Study[C].Ecole Nationale d'Ingenieurs de Metz,1998.
[17] March C,Shim T.Integrated Control of Suspension and Front Steering to Enhance Vehicle Handling[J].Proc.IMechE.vol.221 Part D:J.Automobile Engineering,2007,221:377 -391.
[18] 郭孔辉,马凤军,孔繁森.人-车-路闭环系统驾驶员模型参数辨识[J].汽车工程,2002,24(1):20 -24.