基于交通数据融合技术的行程时间预测模型*
2014-09-30刘春华胡赛阳
李 嘉,刘春华,胡赛阳,王 芳
(1.湖南大学 土木工程学院,湖南 长沙 410082;2.中土集团福州勘察设计研究院,福建 福州 350000;3.清远职业技术学院,广东 清远 511500)
在交通运营与管理中,高效的出行信息与路径诱导系统将发挥越来越重要的作用[1].行程时间作为其中的关键参数,能够为交通状态估计和城市路网拥堵情况的发布提供数据参考[2].同时,行程时间是衡量路段通行效率和延误的重要依据,是反映路段交通状态的直接指标,在智能交通系统中有着广泛应用[3].目前,行程时间的预测研究大都局限于单一交通数据源,由于单源交通数据受采集仪器的精度、采集方法、样本量、人为误差等影响,因而预测精度不稳定.而多源交通数据的融合,可以弥补单源数据的诸多不足,提高预测精度.本文提出利用GPS浮动车数据与微波检测器交通数据进行融合,建立行程时间数据融合模型.目前,数据融合方法主要有以下几种[4]:加权平均法、卡尔曼滤波、Bayes方法、统计决策理论、选举决策法、模糊集理论、神经网络等.其中,神经网络具有较强的学习能力,其内部结构本质上是并行的,与数据融合的结构一致,因此具有较大的优势.
本文拟采用小波神经网络建立数据融合预测模型,同BP神经网络相比,小波神经网络具有更强的信息提取、非线性逼近和容错能力[5],但它存在初始参数随机选取的盲目性、易形成局部极小值而得不到整体最优值等问题[6].遗传算法可以用来优化小波神经网络的初始网络参数,弥补小波神经网络自身的不足.遗传算法与神经网络的有机结合[7],将其用于数据融合可以提高模型的收敛速度与泛化能力.
1 交通数据的采集与处理
1.1 交通数据采集
采集研究区域的出租车GPS数据、微波检测数据及视频数据,用于构建以及评价行程时间预测模型.
1)出租车GPS数据
出租车GPS数据样本量的大小直接影响着融合结果的精度,目前主要采用数理统计抽样方法来确定可靠估计路段行程时间所需探测车辆的最低数量.该方法在允许相对误差和置信水平下探测车辆的最低样本量计算公式如下:

2)微波检测数据
微波检测数据需经过处理才能得到行程时间.由于微波检测器检测的是道路断面平均车速,因此采用如下公式将其转化为区间速度:

式中:vo为区间车速,vs为地点车速,δs为地点车速的观测方差.
则路段行程时间T为:

3)视频数据
视频数据调查时,将两台摄像机分别置于实验路段起迄点,同时开始拍摄.调查后同时在计算机上播放两测点的录像,从起点视频中记下车型、车牌、外廓、颜色等特征及车辆通过起点断面的时间,然后在终点视频中寻找该车,并同时记录车辆通过终点断面的播放时间,前后时间差即为该车通过调查路段的行程时间.
1.2 数据的时空匹配及方法
1)时间匹配
本文采集的出租车GPS数据、微波数据及视频数据虽是同一天的交通流数据,但微波检测与视频数据采集的是早晚高峰时间段内的数据,而出租车GPS数据都是全天候的交通流数据,所以有必要依据微波与视频数据的调查时间挑选出对应时段的出租车GPS数据,这样多源数据反映的就是同一时间段的交通流信息.由于每条GPS数据记录都有接收的时间,通过excel筛选可以很方便进行时间匹配.
2)空间匹配
空间匹配是指多源交通流数据必须反映的是同一地点的交通流信息,这样进行融合才有意义.空间匹配原则是以视频与微波数据的采集现场来筛选相应道路的出租车GPS数据.首先确定视频与微波数据的采集路段的经纬度范围,如图1所示,然后用excel筛选出与采集路段相匹配的出租车GPS数据.

图1 交通调查范围Fig.1 Range of longitude and latitude for traffic investigation
2 融合模型的建立与编程实现
2.1 融合模型的建立
行程时间预测融合模型的输入参数包括出租车GPS行程时间、微波检测器得到的行程时间.同时,由于交通行为有很大的不确定性与随机性,道路交通量与GPS浮动车数量对行程时间的影响比较大,因此,道路交通量、GPS浮动车数量也应作为融合输入参数予以考虑.故输入层有4个节点,输出层有1个节点;隐含层节点数对网络性能的影响很大:点数过少,则局部极小值多,节点数太多又使学习时间过长,而且可能产生过拟合使得网络泛化能力变差[8].隐含层节点数可按公式(4)估算:

式中h为隐含层节点数,m为输入神经元数,n为输出神经元数,a为[1,10]之间的常数.
由式(4)计算得隐含层节点数为5,因此设置小波神经网络结构为4—5—1.得到行程时间预测融合模型如图2所示.
1)输入层:

式中:x1(i)为出租车GPS车辆得到的行程时间;x2(i)为微波检测车辆得到的行程时间;x3(i)为交通流量,x4(i)为出租车GPS车辆的样本量.
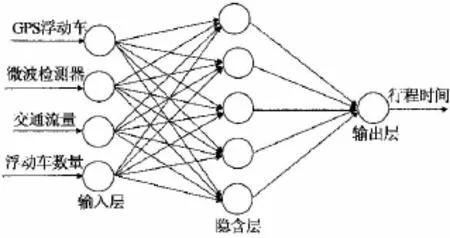
图2 行程时间预测融合模型Fig.2 Travel time prediction fusion model
2)隐藏层:

式中:hm(i)为第m 个隐藏神经元;wj,m为连接第j个输入神经元与第m个隐藏神经元的权重;bm为第m个隐藏神经元的小波基函数平移因子;am为第m 个隐藏神经元的小波基函数伸缩因子;φ(x)为传递函数,文中采用收敛效果更好的余弦调制Morlet小波函数,其表达式为:

3)输出层:

式中:Y(i)为融合后的路段行程时间;ωk为连接第k个隐藏神经元与输出神经元的权重;φ(x)=cx+d为线性函数.
2.2 遗传算法优化小波神经网络参数
融合模型是通过构造一个小波神经网络来实现的.为了加快网络收敛速度,提高融合结果精度,拟利用遗传算法来优化小波神经网络参数(权值Wji,Wkj,平移因子bm和伸缩因子am).遗传算法优化小波神经网络的流程如图3所示.

图3 遗传算法优化小波神经网络流程图Fig.3 Flow diagram of genetic algorithm optimization wavelet neural network
遗传算法优化小波神经网络包括网络结构的确定、遗传算法优化网络初始参数.首先对染色体进行编码设计,通过适应度函数计算个体适应度值,遗传算法通过选择、交叉、变异操作找到最优适应度值对应个体.
1)染色体设计
染色体基因设计采用实数编码,每个染色体均为一个实数串,由输入层与隐含层连接权值Wji,隐含层与输出层连接权值Wkj,平移因子bm,伸缩因子am共4个部分组成,故编码为(Wji,Wkj,bm,am).在网络结构确定的情况下,就可以构成一个权值、平移因子、伸缩因子都确定的小波神经网络.
2)适应度函数
根据个体得到小波神经网络的初始权值、平滑因子、伸缩因子,训练小波神经网络后预测系统输出,预测输出和期望输出之间的误差绝对值和即个体适应度值F,计算公式为:

式中:n为网络节点输出数;yi为小波神经网络第i个节点的输出;oi为第i个节点期望输出.
3)选择操作
遗传算法的选择操作采用轮盘赌法,每个个体被选择的概率pi为:

式中:Fi为个体i的适应度值,k为系数,m为种群个体数目.
4)交叉操作
由于个体采用实数编码,所以交叉操作采用实数交叉法,第k个染色体ak和第p个染色体ap在j位交叉操作方法如下:

式中:b是[0,1]间的随机数.
5)变异操作
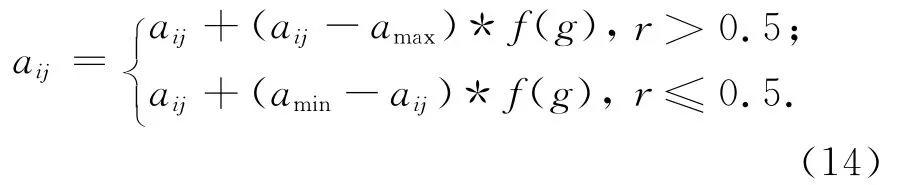
选取第i个个体的第j个基因aij进行变异,变异操作方法如下:

6)遗传算法参数的选取
种群规模增大时,算法的全局搜索能力会增强,但收敛时间会增长,影响算法的效率[9].因此种群规模一般根据问题的复杂度与经验选取.一般取20~100[10],根据程序多次运行的收敛情况,本文选择种群规模为20,进化代数为50代.
交叉概率是决定是否进行参数数值信息互换的关键.交叉概率太大,就变成了随机交叉,太小的话算法难以收敛.本文引入Srinivas[11]自适应交叉概率设计思想,交叉概率Pc为:

式中:Pc0为初始交叉概率,取值范围为[0.6,0.9],建议取0.7;fave为参数组集合中目标吻合度的平均值;fbest为参数组集合中目标吻合度的最优值;f′为两交叉参数组中目标吻合度的较优值;a为变异参数,范围在[0,1]之间,a的取值与初始交叉概率和程序收敛速度有关,建议取a=Pc0/4.
遗传算法优化过程中最优个体适应度值变化如图4所示.

图4 最优个体适应度值Fig.4 The best individual fitness value
从图4可以看出,在仿真运行到15代左右,最优个体的适应度值已趋于稳定,表明遗传算法已得到优化的小波神经网络权值、平滑因子、伸缩因子.遗传算法得到优化后的小波神经网络初始权值、平滑因子、伸缩因子见表1.

表1 优化后的小波神经网络参数Tab.1 The Optimized wavelet neural network parameter
2.3 编程实现
基于改进后的小波神经网络融合模型,采用MATLAB软件编程预测行程时间.
加载已经初步处理的训练和预测数据,并对训练和输出数据进行归一化处理.其中input,output分别为训练输入和输出数据,input_test,output_test分别为预测输入和输出数据.
遗传算法主函数
步骤1:随机初始化种群,maxgen=20,sizepop=50,pcross=0.7,pmutation=0.18;
步骤2:计算种群的适应度值,从中找出最优个体,function error=fun(x,inputnum,hiddennum,outputnum,net,inputn,outputn);
步骤3:选择操作,function ret=select(individuals,sizepop);
步骤4:交叉操作,function cross=select(pcross,lenchrom,sizepop,bound);
步骤5:变异操作,function mutation=select(pmutation,lenchrom,sizepop,num,maxgen,bound);
步骤6:判断进化是否结束,否则返回步骤2.
3)小波神经网络训练
将遗传算法优化后的参数赋给小波神经网络,用归一化的数据对其进行训练.
4)小波神经网络预测
用训练好的小波神经网络预测行程时间,输出最后的预测结果.
2.4 校正目标阈值
校正目标阈值用来判定目标吻合度是否达标,从而确定数据融合模型是否有效.该值的确定主要考虑因素有交通流状况、道路网规模及评价指标类型等.对于大中路网,参考文献[12]给出了校正目标阈值,如表2所示.

表2 目标阈值建议Tab.2 Recommendations of target threshold
3 行程时间预测模型检验
现场交通调查地点为广东清远市北江新区,调查时间为2012年3月28日(周三)和29日(周四)两天,采用视频、微波检测器等方式对研究区域进行交通调查.实验路段选取清远市北江二路,路段长991m,以2min为采样周期,共取240组数据,其中220组用来训练网络,20组用来检测模块的准确性.现场交通调查数据及融合后的行程时间如表3所示,实验路段行程时间对比分析见图5.

表3 初始交通数据及数据融合结果Tab.3 Initial traffic data and results of fusion model

图5 行程时间对比及误差分析Fig.5 Travel time fusion effect diagram and error analysis
从图5中可以看出,GPS出租车得到的行程时间与视频观测值相比偏低,误差超过了目标阈值15%的范围.原因在于出租车频繁超车,车速高于路段车流.而微波检测器得到的行程时间大于视频观测值,误差超过15%的范围.究其原因在于实验路段大客车、大货车较多,遮挡了车流中部分小汽车,造成小汽车数据漏检.而融合后的行程时间与视频观测数据吻合性良好,误差在8%以内,满足目标阈值15%的要求.相比GPS出租车数据或微波检测器数据,融合后的行程时间在准确度和稳定性方面都有了很大提高.
4 结 语
本文提出了基于交通数据融合技术的行程时间预测模型,弥补了单源交通数据预测行程时间精度不高的缺陷.利用遗传算法优化小波神经网络的权值、平移因子、伸缩因子,解决了小波神经网络初始参数选取时盲目与随机性问题,大大提高了小波神经网络搜索效率与训练速度.融合后的行程时间与视频观测数据吻合性良好,表明行程时间预测的数据融合模型是有效可靠的.
[1]邹亮,徐建闽,朱玲湘,等.基于浮动车移动检测与感应线圈融合技术的行程时间估计模型[J].公路交通科技,2007,24(6):114-117.ZOU Liang,XU Jian-min,ZHU Ling-xiang,et al.Travel time estimation model based on the floating car mobile detection and induction coil fusion technology[J].Journal of Highway and Transportation Research,2007,24(6):114-117.(In Chinese)
[2]聂庆慧,夏井新,张韦华.基于多源ITS数据的行程时间预测体系框架及核心技术[J].东南大学学报:自然科学版,2011,41(1):199-204.NIE Qin-hui,XIA Jin-xin,ZHANG Wei-hua.Based on the framework and core technology of multi-source ITS data travel time prediction[J].Journal of Dongnan University:Natural Science Edition,2011,41(1):199-204.(In Chinese)
[3]徐天东,孙立军,郝媛.城市快速路实时交通状态估计和行程时间预测[J].同济大学学报:自然科学版,2008,36(10):253-260.XU Tian-dong,SUN Li-jun,HAO Yuan.The urban expressway real-time traffic state estimation and travel time prediction[J].Journal of Tongji University:Natural Science Edition,2008,36(10):253-260.(In Chinese)
[4]石章松.目标跟踪与数据融合理论及方法[M].北京:国防工业出版社,2010.SHI Zhang-song.Target tracking and data fusion theory and methods [M].Beijing:National Defence Industry Press,2010.(In Chinese)
[5]张冬至,胡国清.基于遗传优化小波神经网络逆模型的油水测量[J].光学精密仪器,2011,19(7):183-189.ZHANG Dong-zhi,HU Guo-qing.Based on genetic optimization wavelet neural network inverse model of the oil-water measurement[J].Journal of Optical Precision Instruments,2011,19(7):183-189.(In Chinese)
[6]宋清昆,王建双,王慕坤.基于遗传算法的小波神经网络控制器设计[J].电机与控制学报,2010,14(4):102-108.SONG Qing-kun, WANG Jian-shuang, WANG Mo-kun.Wavelet neural network controller design based on genetic algorithm [J].Journal of Electric Machines and Control,2010,14(4):102-108.(In Chinese)
[7]周昌能,余雪丽.基于BP网络的权值更新快速收敛算法[J].计算机应用,2006,26(8):1940-1942.ZHOU Chang-neng,YU Xue-li.Fast convergence algorithm based on BP network weight update[J].Journal of Computer Applications,2006,26(8):1940-1942.(In Chinese)
[8]王楠,李成文,李岩.基于神经网络的数据融合方法[J].光机电信息,2010,27(3):36-39.WANG Nan,LI Cheng-wen,LI Yan.Data fusion method based on neural network[J].Journal of Light Mechanical and Electrical Information,2010,27(3):36-39.(In Chinese)
[9]宗刚,刘文芝,张超,等.基于家庭决策的出行方式选择非集计模型[J].湖南大学学报:自然科学版,2013,40(4):100-103.ZONG Gang,LIU Wen-zhi,ZHANG Chao,et al.Household decision based disaggregate mode choice model[J].Journal of Hunan University:Natural Sciences,2013,40(4):100-103.(In Chinese)
[10]巩敦卫.交互式遗传算法原理及其应用[M].北京:国防工业出版社,2007.GONG Dun-wei.The principle and application of interactive genetic algorithm [M].Beijing:National Defence Industry Press,2007.(In Chinese)
[11]SRINIVAS M,PATNAIK L M.Adaptive probabilities of crossover and mutation in genetic algorithms[J].IEEE,1994,24(4):656-657.
[12]HOLM P,TOMICH D,SLOBODEN J,et al.Traffic analysis toolbox volum IV:guidelines for applying CORSIM,microsimulation modeling software[M].Washington D C:Federal Highway Administration,2007:117-216.