永磁同步电机(PMSM)调速系统的智能控制算法研究
2014-09-26王宝忠
王宝忠 ,王 维 ,王 波
(1.江苏科技大学 电子信息学院,江苏 镇江 212003 ; 2.济宁供电公司 山东 济宁 272000)
在实际工业控制过程中经常会遇到滞后、时变、非线性的复杂系统,而PMSM调速系统就是一个复杂的非线性系统,无法获得精确的数学模型,单纯采用PI控制或模糊控制都不会取得较好的控制效果,而采用模糊自整定PI控制方式控制能充分发挥模糊控制鲁棒性强、动态响应好、上升时间快、超调小的优点,又具有PI控制器的动态跟踪能力和稳定精度高的特点。本文只对传统PI控制与模糊自整定PI控制的仿真结果进行比较。
1 模糊自整定PI控制器的设计
模糊自整定PI控制器就是运用模糊数学的基本理论和方法,把规则的条件、操作用模糊集表示,并把这些模糊控制规则及有关信息作为知识存入计算机知识库中,然后计算机根据控制系统的实际响应情况,运用模糊推理,就可以实现对PI参数的最佳调整[1]。模糊自整定PI控制器的结构如图1所示。
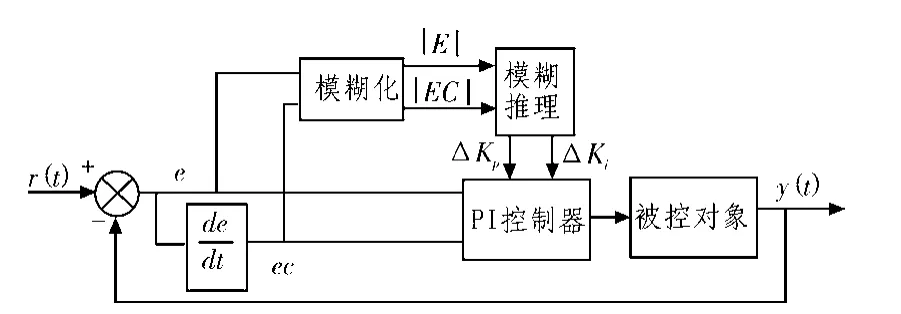
图1 模糊自整定PI控制器的结构Fig. 1 Structure of fuzzy self-tuning PI controller
PI参数模糊自整定控制器就是在常规PI调节器的基础上,应用模糊理论建立参数Kp、Ki与偏差绝对值|E|以及偏差变化绝对值|EC|间的二元连续函数关系的控制器[2]。

在实际控制系统中,误差的变化一般不是模糊论域中的元素,这就需要通过量化因子进行论域变换,定义误差的量化因子Ke=n/e,误差变化率量化因子Kec=n/ec,输出控制量量化因子Ku=u/n[3]。
本系统中,速度的给定值w*=500 r/m,系统的性能指标为:误差e的变化范围不大于给定值的3%,误差变化率ec的变化范围不大于误差的5%。那么,误差e的基本论域为[-15,15],其量化因子Ke=6/15=0.4;误差变化率EC的基本论域为[-0.75,0.75],其量化因子Kec=6/0.75=8。设参数△Kp、△Ki的调整范围不大于已整定参数的20%,系统已整定参数为Kp=2.4,Ki=7.2,则△Kp的基本论域为[-0.48,0.48],其比例因子Kup=0.48/6=0.08;△Ki的基本论域为[-1.44, 1.44],其比例因子Kui=1.44/6=0.24。
在不同的|E|和|EC|下,被控过程对参数Kp、Ki的自整定要求如下。
1)当|E|较大,为使系统响应具有较好的快速跟踪能力,应取较大的Kp,同时为避免系统响应出现较大的超调,需对积分作用加以限制,通常取Ki=0。
2)当|E|为中等大小时,为使系统具有较小的超调,应取较小的Kp和适当的Ki,以保证系统的响应速度。
3)当|E|较小时,为使系统具有良好的稳态性能,应取较大的Kp和Ki。
总结工程设计人员的技术知识和实际操作经验,可得到针对△Kp、△Ki两个参数分别整定的模糊控制表。
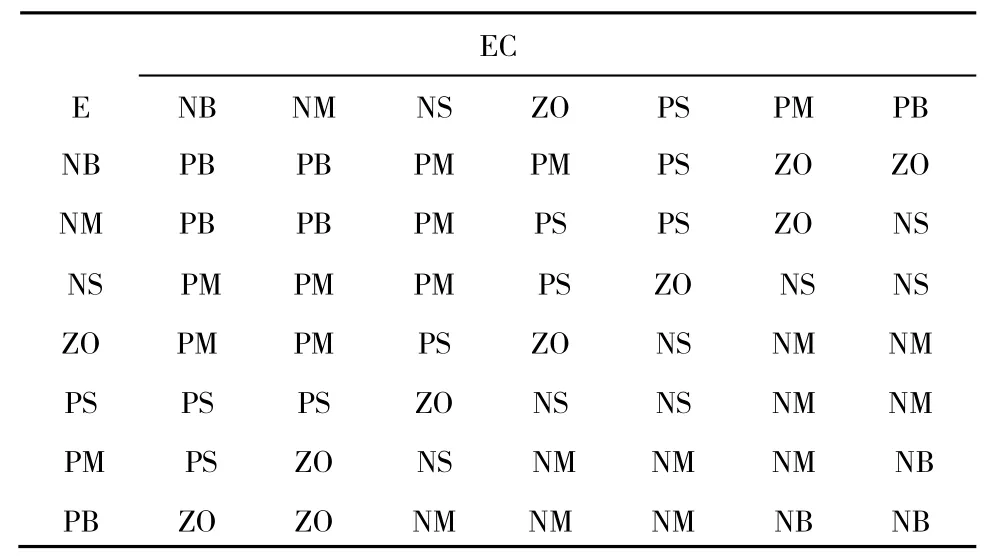
表1 △Kp的模糊规则表Tab.1 The fuzzy rule table of △ Kp
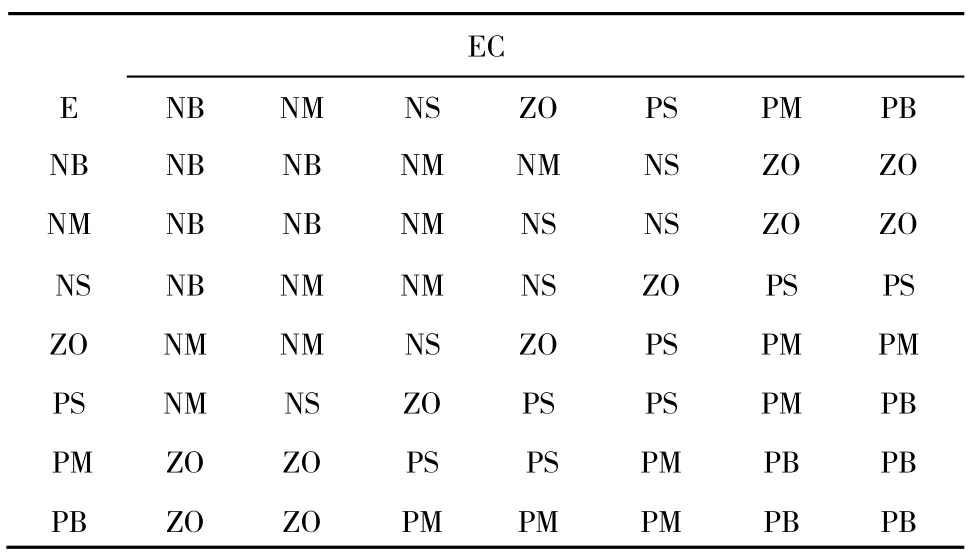
表2 △Ki的模糊规则表Tab.2 The fuzzy rule table of △ Ki
建立好控制规则表后,将系统误差和误差变化率范围定义为模糊集上的论域E,EC={-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6},其模糊子集为E,EC={NB,NM,NS,ZO,PS,PM,PB},为了计算机处理和实现方便,输入偏差E、偏差变化率EC和输出△Kp、△Ki的隶属函数均采用线性函数。根据各模糊子集的隶属度赋值表和各参数模糊控制模型,应用模糊合成推理设计PI参数的模糊矩阵表,查出修正参数代入下式计算:

其中,K'P、K'i为常规PI控制器的设置参数;
△Kp、△Ki为模糊控制器输出的修正量;
Kp、Ki为模糊自整定PI控制器参数。
在线运行过程中,控制系统通过对模糊逻辑规则的结果处理、查表和运算,完成对PI参数的在线自调整。
2 模糊自整定PI控制器的仿真
启动MATLAB后,在主窗口中键入fuzzy回车,屏幕上就会出现 “FIS Editor”界面,即模糊推理系统编辑器。本文选择了如图2所示的模糊控制器,其中输入为偏差E和偏差变化率EC,输出为修正量△Kp、△Ki。该控制器为双输入双输出结构,其选用三角形隶属度函数和重心法解模糊的方式进行[4]。
接下来,按照表1和表2的模糊控制规则表编辑各个输出量与输入量之间的模糊控制规则,模糊控制规则编辑器的窗口[5]如图3所示。以if...then的形式输入49条模糊控制规则。
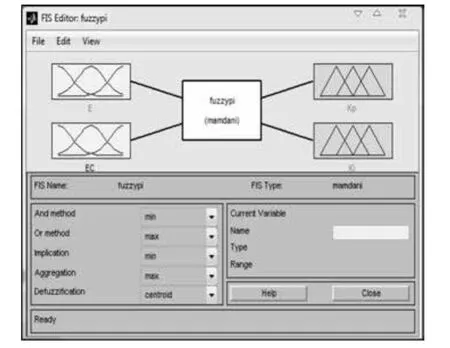
图2 模糊控制器结构图Fig. 2 Structure of fuzzy controller
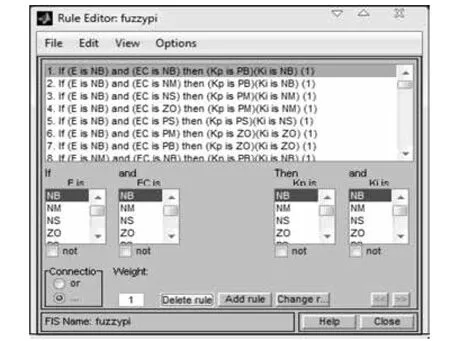
图3 模糊控制规则编辑器Fig. 3 Rule editor of fuzzy controller
最后可以生成输入输出的三维观察图形。Kp、Ki的三维曲面分别如图4、图5所示。
在确定量化因子和比例因子以及建立好模糊控制器之后,对图6的常规PI转速调节器进行优化,建立了图7所示的模糊自适应PI转速控制器,其中Kp、Ki的值保持不变。PMSM调速系统总仿真图[6]如图8所示。
3 仿真结果分析
在给定速度值为500 r/min时,常规PI调节器和模糊自整定PI调节器的仿真响应波形如图9、10所示。
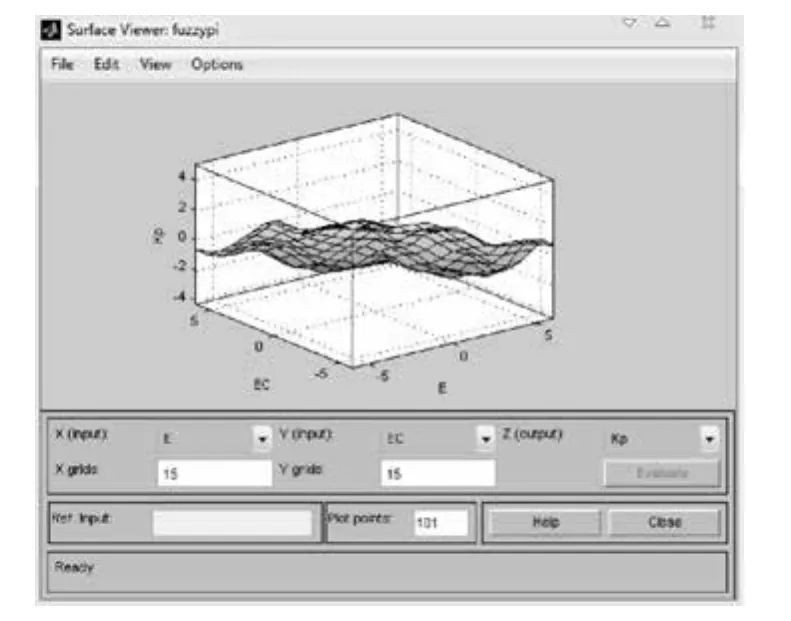
图4 Kp的输出三维图Fig. 4 3D output of Kp
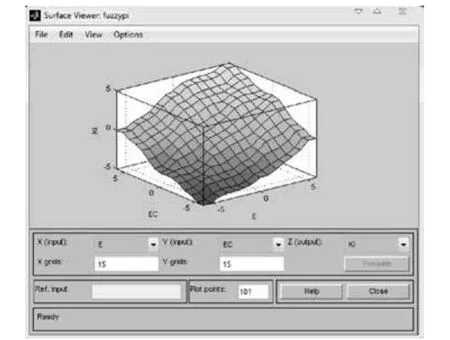
图5 Ki的输出三维图Fig. 5 3D output of Ki
仿真结果表明,采用常规PI控制器时,转速有一定的超调量,而且系统达到稳定的时间较长。采用改进后的模糊自整定PI控制器后,速度几乎没有超调,系统响应速度快。在系统运行时间t=0.2 s时加上5 N·m的额定负载,常规PI控制时,转速波动较大;而采用模糊自整定PI控制时,转速稍有下降,并很快恢复额定转速,具有较好的静差率。

图6 常规PI调节器Fig. 6 Conventional PI regulator
4 结束语
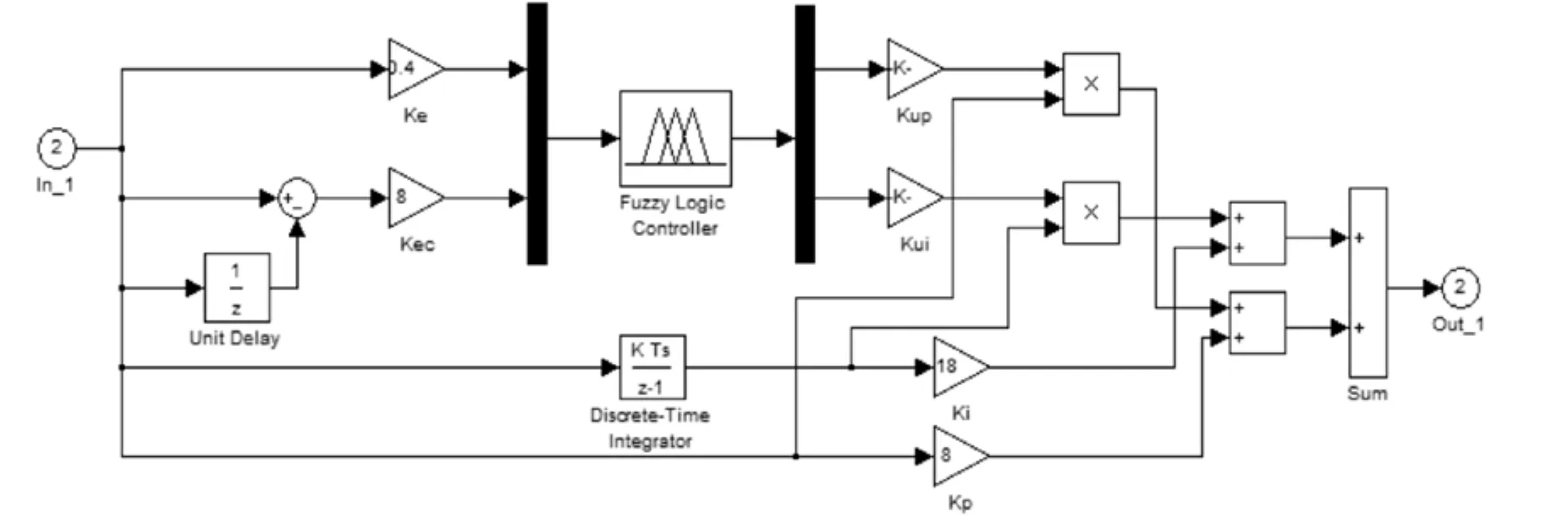
图7 模糊自整定PI调节器Fig. 7 Fuzzy self-tuning PI regulator
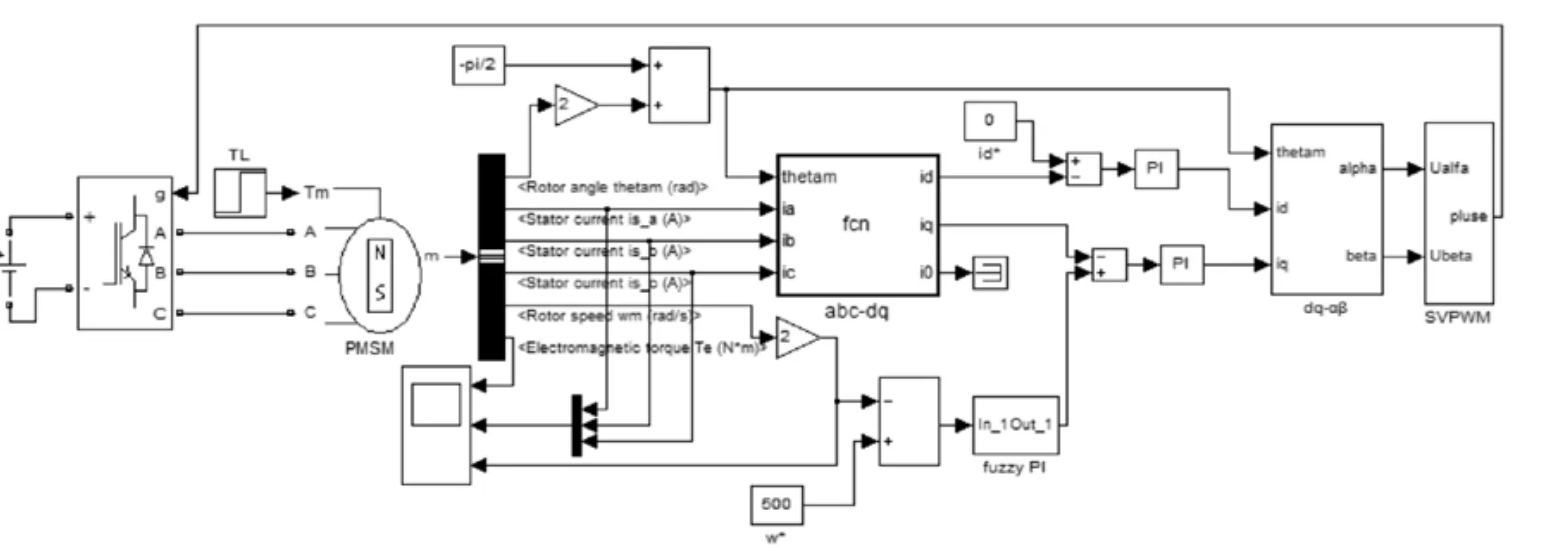
图8 PMSM调速系统模型Fig. 8 Model of PMSM speed control system
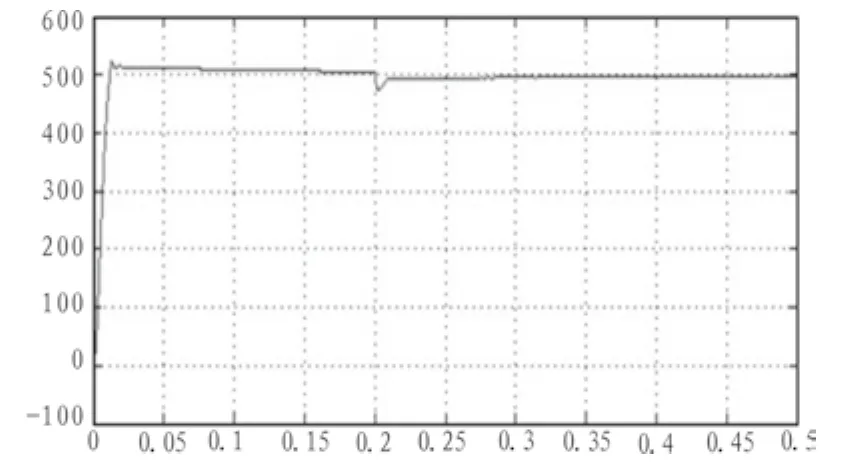
图9 常规PI仿真波形Fig. 9 Conventional PI simulation waveform
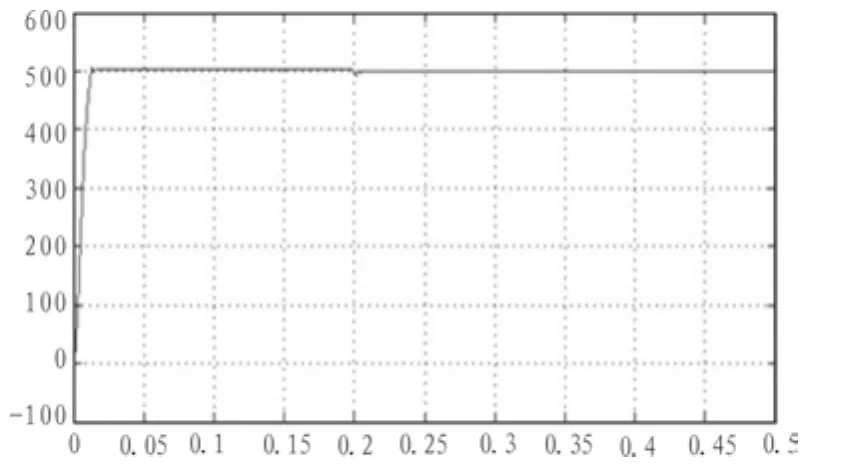
图10 模糊自整定PI仿真波形Fig. 10 Fuzzy self-tuning PI simulation waveform
本文分析了两种不同算法控制的PMSM[7-8]调速系统,并在MATLAB/simulink环境下实现了PMSM的基于常规PI和模糊自整定PI控制的建模和仿真,分别在空载和加负载两种情况下对系统进行仿真。仿真结果表明:基于模糊自整定PI控制的PMSM调速系统能够快速跟踪转速的变化,具有很好的控制特性。
[1]黄友锐,曲立国.PID控制器参数整定与实现[M].北京:科学出版社, 2010.
[2]曾光奇,胡均安,王东,刘春玲.模糊控制理论与工程应用[M].武汉:华中科技大学出版社, 2006.
[3]石辛民,郝整清.模糊控制及其MATLAB仿真[M].北京:清华大学出版社,2008.
[4]刘金琨.先进PID控制MATLAB仿真[M].北京:电子工业出版社, 2004.
[5]周成. 模糊控制在永磁同步伺服系统中的应用与研究[D].长沙:湖南大学, 2009.
[6]姚绪梁.现代交流调速技术[M].哈尔滨:哈尔滨工程大学出版社, 2009.
[7]刘小河,王鹤华.基于SVPWM永磁同步电机反馈线性化控制[J].现代电子技术,2013(12):159-162.
LIU Xiao-he,WANG He-hua.Feedback linearization control of PMSM based on SVPWM[J].Modern Electronics Technique,2013(12):159-162.
[8]方国维,罗文广.基于神经网络补偿的永磁同步电机控制[J].电子科技,2013(4):143-145,149.
FANG Guo-wei,LUO Wen-guang.PMSM control based on neural network compensation[J]. Electronic Science and Technology,2013(4):143-145,149.