全智能大棚监控系统的设计
2014-09-26殷刚,赵琳
殷 刚,赵 琳
(西南交通大学峨眉校区 电气工程系,四川 峨眉 614202)
传统的温湿度控制是在温室大棚内部悬挂温度计和湿度计,通过读取温度值和湿度值了解实际温湿度,然后根据现有温湿度与额定温湿度进行比较,看温湿度是否过高或过低,然后进行相应的通风或者洒水[1]。这些操作都是在人工情况下进行的,耗费了大量的人力物力。现在,随着国家经济的快速发展,农业产业规模的不断提高,农产品在大棚中培育的品种越来越多,对于数量较多的大棚,传统的温湿度控制措施就显现出很大的局限性。温室大棚的建设对温湿度检测与控制技术也提出了越来越高的要求。
为了解决上述难题,本系统以单片机为核心,利用无线通信,具有数据的采集、处理、实时显示、环境的调节等功能,实现对大棚内的温湿度和光照的调节,达到作物生长的最佳条件。不仅具有控制方便、灵活性大等优点,还能够大大提高缩短农作物的成熟期,提高效率,节约成本。
1 系统的硬件设计
本监控系统由3部分组成:采集小车、控制端及监控端。采集小车以循迹小车为平台,搭载温湿度传感器、光照传感器、红外传感器(用于循迹)、无线模块,在跑道上沿着黑线运行,采集预设点位置的温度、湿度和光照值并通过无线模块发送给控制端和监测端。大棚内的控制端以AT89C52为核心,通过无线模块接收数据,对数据处理后通过液晶显示数据,并通过继电器来控制外围的环境调节装置。监控端是由无线模块将数据传给上位机,在对数据进行处理后,将数据以图形的方式显示在电脑屏幕上,用于观测大棚内的情况。系统的总体结构如图1所示。
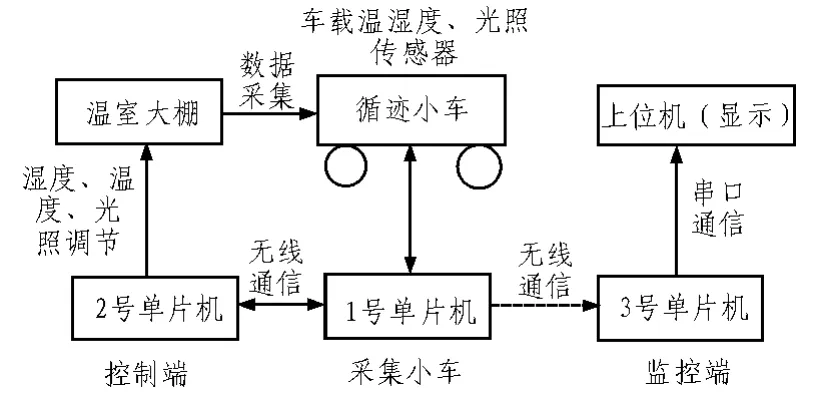
图1 系统总体结构图Fig. 1 System architecture figure
1.1 采集小车的设计
采集小车是以AT89C52为核心,用红外传感器来检测道路的信息,判断小车当前所在的位置,通过控制电机使小车沿着跑道上的黑线行走。当小车到达设定的采集点时,就使温度传感器、湿度传感器、光照传感器工作,将采集到的数据再通过无线模块发送给控制端和监控端。
1)电机驱动模块
以L298N驱动芯片为核心,搭建外围电路来驱动小车。L298N是ST公司生产的一种高电压、大电流电机驱动芯片[2]。该芯片可以驱动一台两相电机或四相步进电机,也可以驱动两台直流电机。驱动模块电路如图2所示。
2)循迹模块
循迹模块使用红外发射和接收管等分立元件组成探头,并使用LM339电压比较器(加入迟滞电路),防止临界输出抖动作为核心器件构成中控电路。红外线照到白线上时会反射大部分光,接收管能够收到红外光,而在黑线上时则全部被吸收,接收管则收不到。利用这个原理,小车就能沿着白色背景中间是黑线的道路上行走,实现了自动行走。红外对管的电路图如图3所示。小车的底盘上装有四个TCRT5000红外模块,这样小车就能够通过识别哪些红外接收管在黑线上,来判断自己在道路上的位置,进而对小车的行走方向进行控制,如左转、右转、停止等,防止小车跑出道路。

图2 驱动电路Fig. 2 Driver module circuit
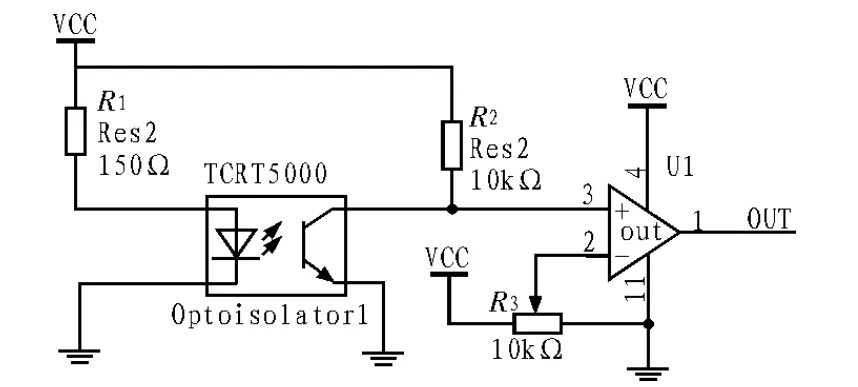
图3 红外对管电路Fig. 3 Infrared tube circuit
3)温度采集模块
温度采集模块使用DS18B20数字式温度传感器[3],与传统的热敏电阻不同的是,使用集成芯片,采用单总线技术,其能够有效的减小外界的干扰,提高测量的精度。同时,它可以直接将被测温度转化成串行数字信号供微机处理,接口简单,使数据传输和处理简单化。部分功能电路的集成,使总体硬件设计更简洁,能有效地降低成本,搭建电路和焊接电路时更快,调试也更方便简单化,这也就缩短了开发的周期[4]。
4)湿度采集模块
湿度采集模块采用DHT11数字湿度传感器,DHT11数字温湿度传感器是一款含有已校准数字信号输出的温湿度复合传感器,它应用专用的数字模块采集技术和温湿度传感技术,确保产品具有极高的可靠性和卓越的长期稳定性。每个DHT11传感器都在极为精确的湿度校验室中进行校准。校准系数以程序的形式存在OTP内存中,传感器内部在检测型号的处理过程中要调用这些校准系数。单线制串行接口,使系统集成变得简易快捷。超小的体积、极低的功耗,使其成为给类应用甚至最为苛刻的应用场合的最佳选择[5]。
5)光照采集模块
光照采集模块采用GY-30数字式光照强度检测模块,该模块采用ROHM原装BH1750FVI芯片。其特点有:①IIC总线接口(f/s模式支持);②光谱的范围跟人眼相近;③照度数字传感器;④50 Hz/60 Hz光噪声抑制功能;⑤光源的依赖性不大;⑥无需任何外部元件;
6)无线模块
无线模块采用以NRF24L01芯片为核心。NRL24L01是NORDIC公司生产的工作在2.4 ~ 2.5G Hz的ISM 频段的单片无线收发器芯片。几乎可以连接到各种单片机芯片,并完成无线数据传送工作。采用FSK调制,内部集成NORDIC自己的Enhanced Short Burst协议。可以实现点对点或是一对六的无线通信,无线通信速度可以达到2M(bps)[6]。
NRF24L01的功能框图如图4所示。从单片机控制的角度来看,我们只需要关注图右边的6个控制和数据信号,分别为CSN、SCK、MISO、MOSI、IRQ、CE。
1.2 控制端的设计

图4 NRF24L01功能框图Fig. 4 NRF24L01 functional block diagram
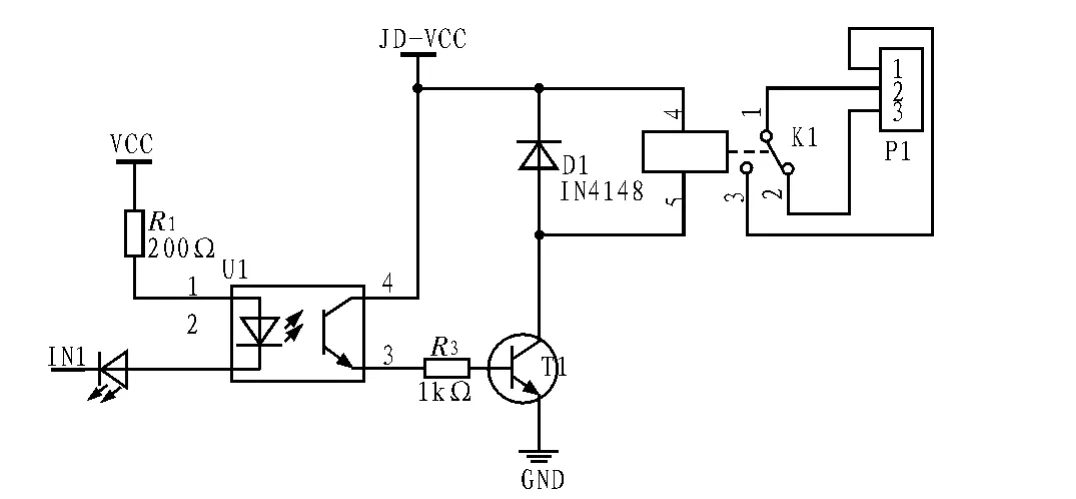
图6 继电器模块电路Fig. 6 Relay module circuit
控制端由AT89C52单片机、继电器、液晶显示、按键、无线模块等组成。单片机通过无线模块将接收到的数据进行处理,与用户设置的光照、温湿度值的范围进行比较,判断大棚内的环境是否满足植物生长的需求,从而通过继电器来控制灯、风扇、水泵等设备来调节环境。液晶显示模块和按键可以很方便的设置光照、温湿度值的范围。控制端还有具有控制小车采集周期的功能,当设定的时间到了时,就给采集小车发送一个启动命令,使小车开始新一轮的数据采集。
1)液晶模块
液晶显示器具有厚度薄、适用于大规模集成电路直接驱动、易于实现全彩色显示的特点,目前已经被广泛应用在便携式电脑、数字摄像机、PDA移动通信工具等众多领域。本系统采用LCD1602,只能显示字符和数字,不能显示汉字,能显示两行,每行16个字符。图5是LCD1602的引脚图。
2)继电器模块
因为单片机不能直接去驱动灯,风扇、水泵等负载,所以只有通过继电器来间接的控制这些设备。图6是继电器模块的电路图。
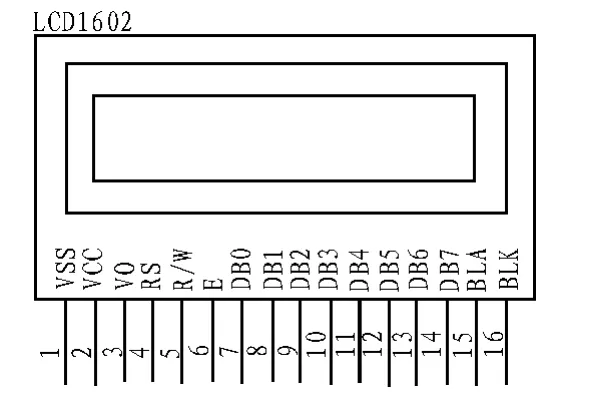
图5 LCD1602引脚图Fig. 5 LCD1602 pin figure
1.3 监控端的设计
监控端由PC机、USB无线串口模块、上位机3部分组成。无线模块接收到数据后通过单片机的串口将数据发送到上位机,上位机再对数据进行处理,然后在电脑上显示出图形。
1)USB无线串口模块
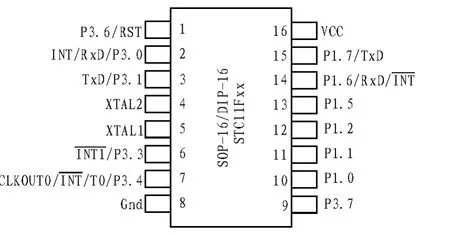
图7 STC11F02E引脚图Fig. 7 STC11F02E pin diagram
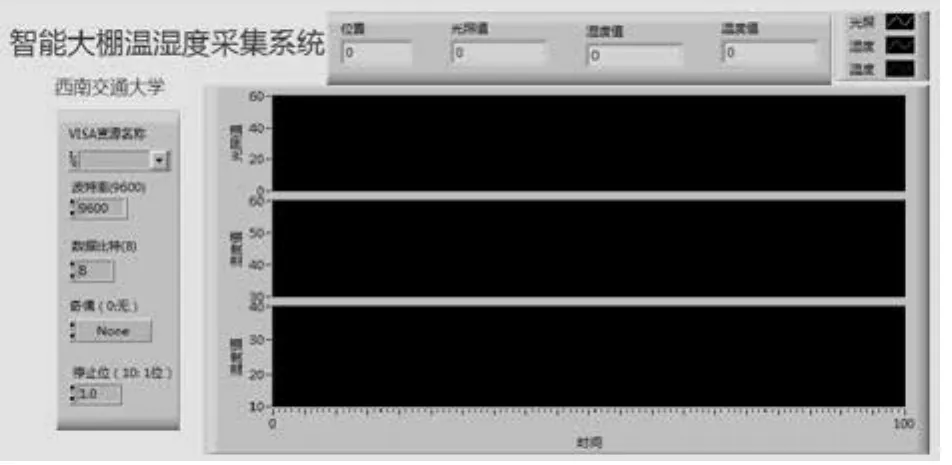
图8 上位机界面Fig. 8 Host computer interface
USB无线串口模块由NRF24L01芯片、STC11F02E单片机、CH340 USB转串口芯片构成。STC11F02E是STC生产的单时钟/机器周期(1T)的单片机,是高速/低功耗/超强抗干扰的新一代8051单片机,指令代码完全兼容传统8051,但速度快8-12倍。内部集成复位电路,针对高速通信,智能控制,强干扰的场合。图7是STC11F02E的引脚图。
2)上位机
上位机使用Labview来制作,可以很方便的直接使用软件提供的串口通信模块,以及图形显示模块,容易制作,开发周期短。设计的上位机界面如图8所示。图中可以分别显示光照、湿度、温度3条曲线,而且还可以选择端口,以及对波特率、数据比特、奇偶校验、停止位的设置,适用范围广、方便灵活。
2 系统软件设计
系统采用层次化、模块化结构设计,系统的软件设计主要由两部分组成:采集小车的软件设计、控制端的软件设计。
2.1 采集小车的软件设计
程序流程图如图9所示,系统开始后,采集小车收到大棚控制端发出的开始指令后,开始行走,当遇到采集点处的黑线时就停下来,温湿度、光照传感器开始采集数据,并由无线模块将数据发送给控制端和监控端,同时定时器1来控制在每个采集点停留的时间,当时间到了时,小车就继续前进,并停止发送数据。如果第7次检测到黑线时(假设包括起始点在内的黑线有7条),就停止运行,一次采集完成,需等待控制端发送起始信号才再次开始工作。
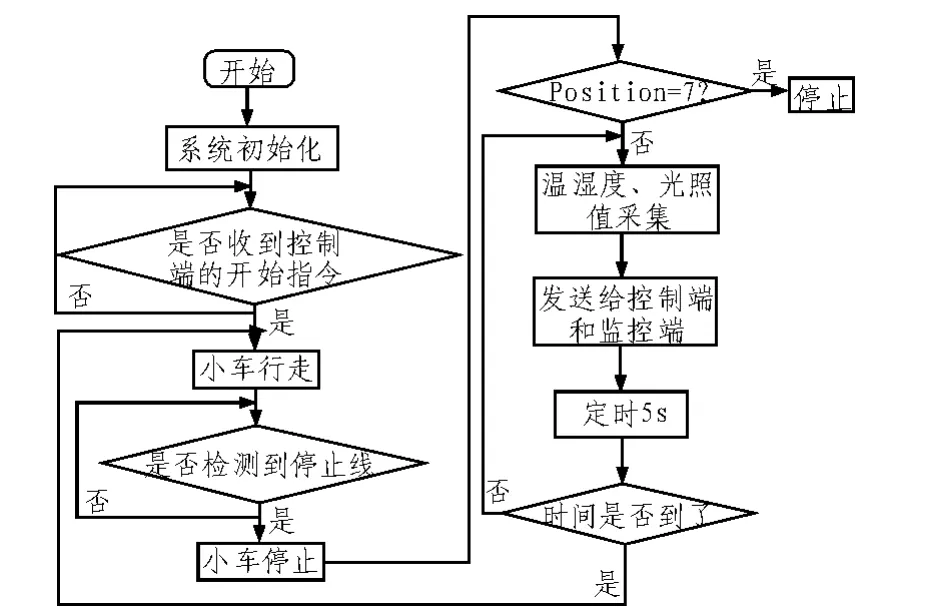
图9 采集小车流程图Fig. 9 Car collection flowchart
2.2 控制端的软件设计
控制端对收到的数据进行处理,得到光照值、温度值、湿度值以及位置信息,然后在根据用户设定的适合作物生长的光照、温度、湿度值进行比较。如果光照值不够,就开启灯,来补偿光照;如果够了的话,就关闭灯。如果湿度值大于设定值,就开启风扇,将湿气吹出大棚;如果低于设定值,就开启水泵给植物喷水,并由相应的算法来确定吹风和喷水的时间。控制端还要给小车发送起始信号,以及控制采集的周期,程序流程图如图10所示。
3 系统运行结果
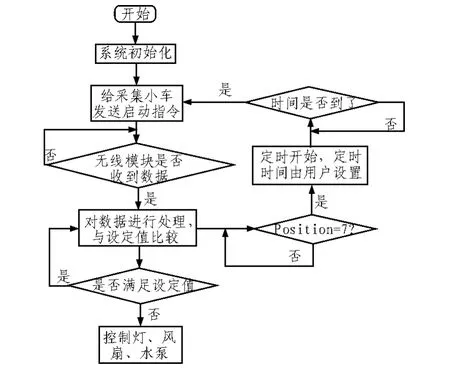
图10 控制端程序流程图Fig. 10 Control terminal program flow chart
将小车放在跑道的起始线处,然后在控制端设置好温度值、湿度值、光照值和采集周期,随后控制端与小车通过无线模块建立通信,给小车发送一个启动命令,小车收到后就开始行走,当到达采集点时就停止前进,开始采集数据,并将采集到的数据发送给控制端和监控端,控制端对数据处理后对灯进行控制,同时监控端绘制3条曲线来分别显示光照、温度、湿度值。定时时间到后,小车继续行走直到下一个点。当小车走完一圈回到起始线处时,对测得的几个采集的湿度值求平均值,如果湿度值高于设定值就启动风扇,如果小于设定值就启动水泵。当系统运行时,在电脑上看到的上位机界面如图11所示,可以看到3条曲线,从上到下依次是光照、湿度和温度。
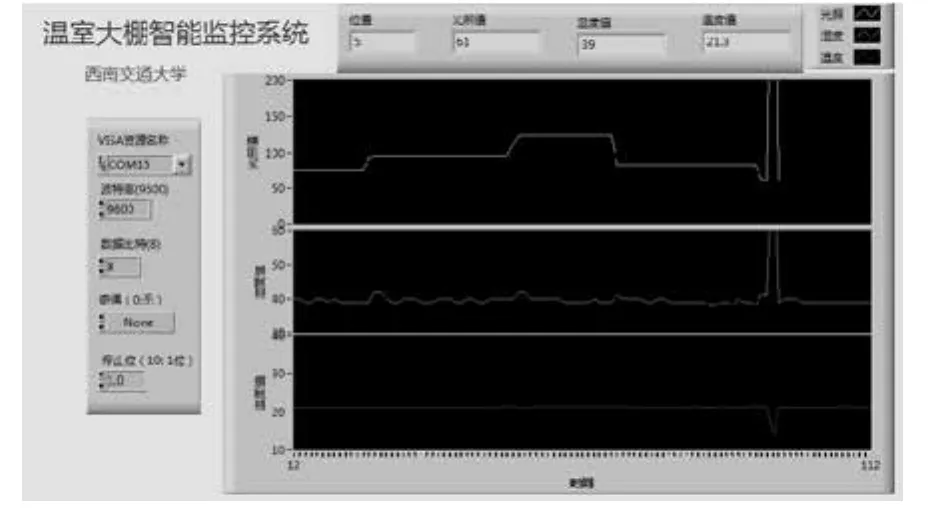
图11 上位机实际运行图Fig. 11 Figure of the actual operation of the host computer
4 结束语
该监控系统具有测量精度高、使用简单、采集范围广、成本低、扩展性好等优点,能够实现大棚控制的全自动化。
[1]余朝刚.温室气候环境微机测控系统与控制方法的研究[D].杭州:浙江大学,2005.
[2]靳桅,潘育山,邬芝权.单片机原理及C51开发技术[M].成都:西南交通大学出版社, 2009.
[3]刘淼.基于DS18B20的温度控制器设计[J].西安外事学院学报, 2008(12): 92-94.
LIU Miao. DS18B20 based on the temperature controller[J].Journal of Xi'an International University, 2008 (12):92-94.
[4]薛燕红.基于89C51+DS18B20的智能温控器的研制[J].微计算机信息,2007,23(7):198-199.
XUE Yan-hong. Based on 89C51+DS18B20 warm controlling development[J]. Microcomputer Information, 2007, 23(7):198-199.
[5]王宝芹,范长胜,郭艳玲.基于单片机的温湿度控制系统设计[J].林业机械与土木设备,2008,36(3):39-40.
WANG Bao-qin, FAN Chang-sheng, GUO Yan-ling. Design of SCM-based temperature and humidity control system for a greenhouse[J].Forestry Machinery &Woodworking Equipment,2008, 36(3):39-40.
[6]黄婷,施国梁,黄坤.单片机无线通信系统的设计与实现[J].微机处理, 2010,31(3): 27-31.
HUANG Ting, SHI Guo-linag, HUANG Kun. On the design and realization of a microcontroller-based wireless communication system[J].Microprocessors, 2010,31(3):27-31.
