集成互补不变特征的SAR影像自动配准
2014-09-26王晓华邓喀中杨化超
王晓华,邓喀中,杨化超
(1.河南理工大学测绘与国土信息工程学院,焦作 454000;2.中国矿业大学江苏省资源环境信息工程重点实验室,徐州 221116)
0 引言
SAR影像配准是利用SAR影像进行矿区变化监测的重要环节。目前,虽然对光学影像配准比较成熟的算法已经被广泛应用[1-3],但是由于SAR影像与光学影像成像机理不同,这些算法不能够直接应用于SAR影像的配准。已有的SAR影像配准算法一般是基于影像灰度相关进行的,虽然能够满足雷达干涉测量的需要,但是对宽基线SAR影像的配准还达不到精度要求,因此不能满足矿区复杂的变化监测需求。
SAR影像配准主要分为SAR同源影像的配准和SAR影像与光学影像的配准。由于SAR同源影像之间变形较大,尤其对宽基线SAR影像,同一地物影像灰度相差较大,使基于灰度的影像配准方法已不能满足要求。目前,基于特征的SAR影像配准已有许多成熟算法被提出:如Dare和Dowman采用影像边缘特征点进行同名点匹配[4],但该方法实际处理起来比较繁琐;DeBonet等提出了基于纹理驱动的SAR影像自动配准方法[5],但该方法要求SAR影像有较多的亮点或特征线作为匹配特征,这些在一般情况下难以得到满足;基于不变矩的影像自动配准方法需要首先提取影像闭合区域特征,然后利用区域重心进行同名点配准[6],但由于SAR影像信噪比较低,该算法要求的闭合区域在SAR影像处理中不能得到满足;于秋则提出了基于小波迭代求精与信息融合的SAR同源影像配准方法[7],这种方法对SAR影像变形不大的情况有效,但难以配准不同分辨率的影像。由于在SAR影像配准时,主、辅影像间存在较大变形,需要进行旋转、缩放等处理,因此一般的影像配准算法就不再适合应用于实时的SAR影像配准。为此,针对SAR影像的成像特点,本文借鉴目前光学影像配准研究中热点的算法,提出了一种基于集成互补不变特征的SAR影像配准方法。该方法首先以区域分割进行粗匹配,然后采用改进Canny边缘特征的SIFT特征进行精匹配。实验证明,该方法提高了宽基线SAR影像的配准精度,对于矿区SAR影像配准是一种行之有效的方法。
1 配准方法
区域特征相对于点特征与线特征来说,具有更多可供配准使用的信息,因此采用区域特征进行SAR影像的粗匹配,初步纠正主辅影像间空间几何特征的变换。在基于区域特征的匹配中,提取典型的区域是至关重要的,即根据影像的边缘特征把主辅影像分别分割成几个区域。该过程由影像边缘检测和边缘连接来实现。本文提出一种结合Canny算子[8]、强度算子以及数学形态优化技术来完成边缘提取和连接的方法,以实现影像分割。这样不仅保证了边缘提取的准确性和对弱边缘的保护,而且还可以快速完成边缘优化和连接。在粗匹配基础上再利用改进Canny特征点的SIFT算法进行精匹配,最终获得SAR影像的精确配准。具体流程如图1所示。
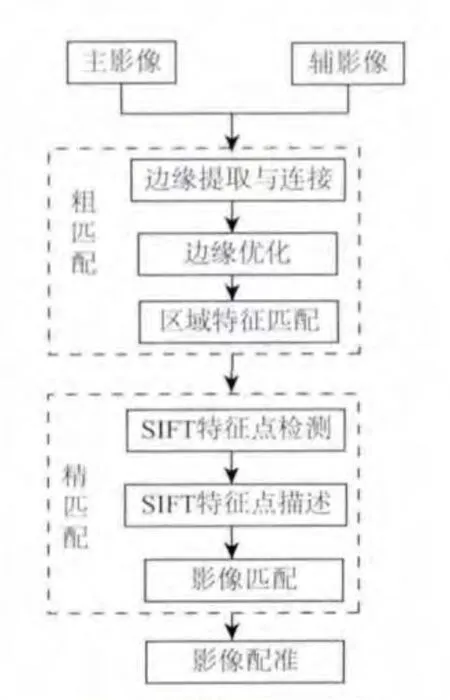
图1 影像配准流程Fig.1 Image registration flowchart
1.1 粗匹配
1.1.1 边缘提取与连接
Canny边缘提取算子[9]是目前比较好的边缘提取算子之一。该算子基于Gauss函数的一阶导数,在检测边缘时与 Log 算子[10]、Sobel算子[11]以及Laplacian算子[12]相比具有定位精度高及能够有效抑制虚假边缘点等优点。具体步骤如下:
1)对原始影像进行高斯滤波,消除影像中的噪声,数学表达式为

式中:H(x,y)=e-(x2+y2)/2σ2为高斯核函数;I(x,y)为原始影像,(x,y)为像素点坐标;σ为平滑参数。
2)采用高斯函数的一阶偏导数对影像再次进行滤波,计算每个像素点的梯度幅值M(x,y)和θ(x,y)方向。
3)利用局部梯度极大值点抑制非极值点(这是因为全局梯度不能确定边缘点)。
4)采用双阈值法检测边缘点并进行边缘连接。
经过上述操作步骤后,便分别获得原主辅影像的边缘影像I1和I2
1.1.2 边缘优化
由于SAR影像上的噪声较为严重,上述检测出的边缘可能会出现个别“虚假边缘”。由于在匹配时仅采用典型的大区域,因此首先用形态学上的“开启”和“闭合”算子移除小区域的边缘或虚假边缘,余下大区域边缘组成边缘影像Ioi(i=1,2),这样可以降低运算量;然后对边缘影像进行优化,对未构成闭合区域的边缘再进行形态膨胀连接,并腐蚀细化,得到影像ITi(i=1,2);最后,对封闭区域进行填充,产生影像区域,其二值图表示为IRi={其中示第i幅影像中的第j个区域。
1.1.3 区域特征匹配
获得区域特征影像后,对2幅影像的区域特征进行描述。这种描述要力求消除影像间的平移、旋转及尺度变换等影响。常用描述符主要有边界长度、边界曲率、矩及链码等。这些描述符可以单独使用,也可以结合使用。本文采用7阶不变矩进行描述[13]。该描述符能够有效快速地描述影像区域特征。用影像区域的7个不变矩φ1,φ2,…,φ7组成向量 φi=[φ1,φ2,…,φ7](i=1,2)来描述主辅影像区域。其中:①φj(j=1,…,7)具有平移不变性,尺度不变性,旋转不变性;②φj(j=1,…,6)具有反转不变性;③φ7具有反转后幅值不变,仅符号改变的特性。
对主、辅影像区域的向量φi采用欧几里德距离作为相似性测度进行粗匹配,其距离计算公式为

采用式(2)作为匹配的相似性测度时,其值越小匹配的精度就越高。
SAR影像经过粗匹配后,已经初步纠正了其空间几何变换,但为了使SAR影像达到对复杂地区(如矿区)进行精确监测的目的,仍需要继续提高匹配精度。
1.2 精匹配
1.2.1 SIFT 特征点检测
由于SIFT检测到的特征点数量较大,运用Canny边缘点可以优化SIFT特征点,增强SIFT特征点的鲁棒性,因此精匹配采用杨秋菊等[14]提出的改进Canny特征的SIFT检测方法进行匹配。具体步骤如下:
1)采用SIFT算子检测候选特征点;应用DOG(difference of gaussian)差分算子的主曲率过滤掉部分边缘响应点;计算每个特征点p1在原始影像中的位置。由于Canny算法检测的边缘点坐标为整数,因此SIFT算法提取的特征点坐标相应的也取整数。
2)对粗匹配阶段提取的每个边缘点p2,采用Canny算法计算出其邻域内点集p3。
3)比较步骤1)和步骤2)中的候选特征点p1和边缘点p2的坐标值是否相等,如果相等,就舍弃特征点p1,否则继续与点集p3进行比较。若p3中有与p1坐标相等的点,则舍弃特征点p1;若仍然没有相等的点,则p1继续与由步骤2)生成的其他边缘点进行比较。整个过程可以用式(3)(4)表示,即
当f1=0时,舍弃特征点p1,否则继续运算式(4);当f2=8时,保留特征点p1;当f2=7时,则舍弃特征点 p1。
1.2.2 SIFT 特征点描述
SAR影像经过上述步骤处理后,便获得了稳定的SIFT特征点。以这些特征点为中心,在其邻域内进行采样,同时用直方图在0~360°范围内(以10°为1柱,共36柱)统计邻域像素的梯度方向。该直方图的峰值代表该特征点处的邻域梯度的主方向,也就是该特征点的方向。有时在梯度方向直方图中存在另外一个相当于主峰值80%能量的峰值,该峰值方向被认为是该特征点的辅方向。为增强特征点的鲁棒性,一个特征点有可能被指定多个方向。其中影像处的梯度幅值M和方向Q的计算公式分别为

为使特征点具有旋转不变性,旋转坐标轴使其与特征点方向一致,然后以特征点为中心取8像素×8像素的窗口,用式(5)计算其模值和梯度方向,再用高斯加权赋予权值。以4像素×4像素小块为种子点,计算8个梯度方向直方图和每个梯度方向的累加值,这样每个特征点就产生4×4×8=128个数据。这种思想能够增强算法抗噪声的能力。此时SIFT特征矢量具有了尺度不变性和旋转不变性,最后将特征矢量的长度归一化,以去除光照变化的影响。
1.2.3 影像匹配
采用最近邻与次近邻比值作为相似性测度对SIFT特征矢量进行匹配,若该比值小于某个阈值,则其对应的点为正确匹配,否则就舍弃。需要注意的是,如果采用较小的比值,尽管可以获得准确率较好的匹配结果,但部分正确匹配也可能会被舍弃掉。因此,本文采用经验值0.6进行匹配。对于出现的误匹配,则采用RANSAC算法[15]进行剔除。
1.3 影像配准
采用上述匹配获得的最佳仿射变换参数将辅影像向主影像进行重采样。辅影像中每点坐标(x,i,整数坐标值采用双线性插值法从整数坐标值中估算出来,使影像获得亚像素级配准。其中,a和t为6个最佳仿射变换参数。
2 实验分析
为验证本文方法对矿区SAR影像配准的有效性,本实验算法程序在Matlab 7.13平台上运行。本文仅提供一组实验结果。该组实验所用的影像空间分辨率为3 m,主、辅影像大小分别为610像素×481像素和698像素×535像素,原始影像如图2所示。
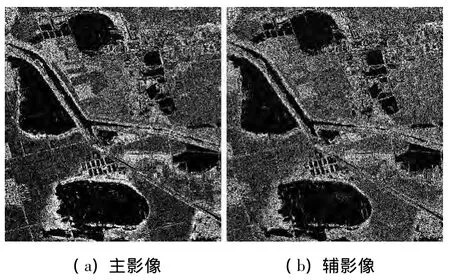
图2 原始影像Fig.2 Original images
首先进行Canny边缘检测与连接,以分割出区域特征。由图3和图4可知,小区域经膨胀腐蚀运算后被消除,余下4个典型的大区域。利用不变矩的欧几里德最小距离方法对这4个典型的大区域进行粗匹配,然后采用改进 Canny特征点的 SIFT算法,并运用RANSAC去除错误匹配,最终获得精确匹配,其结果如图5所示。
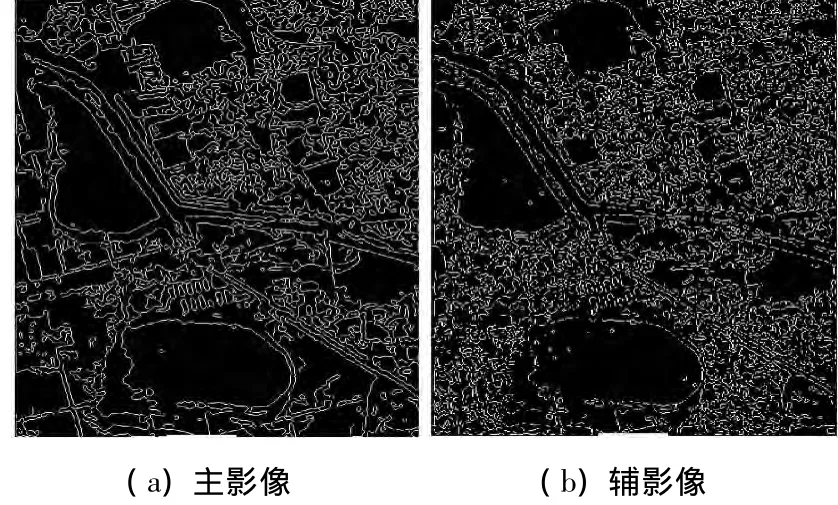
图3 Canny边缘检测图像Fig.3 Canny edge detection images
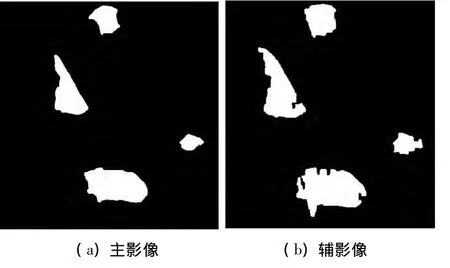
图4 主、辅影像区域匹配结果Fig.4 Patch match results of master image and slave image
图5 中蓝线表示精匹配点对。经过上述2步匹配,获得了如图6所示的配准结果。
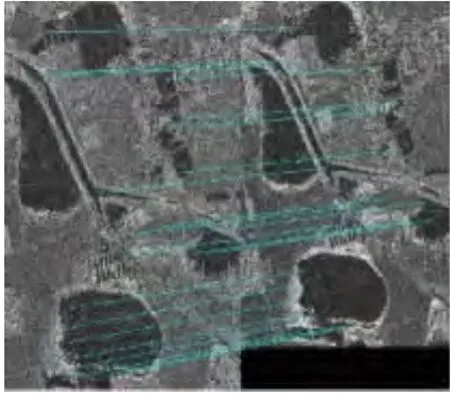
图5 精匹配结果Fig.5 Fine match results

图6 配准结果 Fig.6 Registration results
由表1可知,使用本文方法得到配准结果的均方根误差为0.664 7,比边缘轮廓配准精度提高近20%。

表1 配准精度比较Tab.1 Registration accuracy comparison
3 结论
本文提出的SAR影像自动配准方法,在一定程度上能够弥补直接用SIFT特征进行SAR影像配准的缺陷,使SAR影像获得亚像素级配准精度,尤其对宽基线SAR影像的配准效果更明显。该方法虽然与文献[4]方法有相似之处,但由于采用了由粗匹配到精匹配2步流程,因此不仅配准精度有所提高,而且由于在粗匹配阶段采用了典型区域、精匹配阶段采用了稳定Canny边缘检测的SIFT特征点的做法,因此更易于实际操作。
SAR影像后期处理对变形监测,尤其是矿区沉陷监测非常重要,因此本文准确配准SAR影像的方法对研究矿区沉陷监测具有重要意义。但本文方法不足之处是对空间分辨率差别较大的SAR影像配准效果不够理想,因此,如何提高空间分辨率相差较大的SAR影像的自动配准效果,将是今后的主要研究目标。
[1]焦斌亮,樊曼曼.基于改进SIFT算法的多源遥感影像配准研究[J].激光与红外,2011,41(12):1383-1386.Jiao B L,Fan M M.Research on the multi- source remote sensing image registration based on the improved algorithm of SIFT[J].Laser and Infrared,2011,41(12):1383-1386.
[2]苏延超,艾海舟,劳世竑.图像和视频中基于部件检测器的人体姿态估计[J].电子与信息学报,2011,33(6):1413-1419.Su Y C,Ai H Z,Lao S H.Part detector based human pose estimation in images and videos[J].Journal of Electronics and Information Technology,2011,33(6):1413-1419.
[3]张如艳,王士同.基于重尾噪声分布特性的多分类人脸识别方法[J].电子与信息学报,2012,34(3):523-528.Zhang R Y,Wang S T.Multi- classification recognition method applied to facial image based on distribution characteristic of heavy- tailed noise[J].Journal of Electronics and Information Technology,2012,34(3):523-528.
[4]Dare P,Dowman I.An improved model for automatic feature-based registration of SAR and SPOT images[J].ISPRS Journal of Photogrammetry and Remote Sensing,2001,56(1):13-28.
[5]DeBonet J S,Chao A.Structure- driven SAR image registration[EB/OL].http://www.ai.mit.edu.
[6]Huang Y,Wang J G,Huang S J.Image matching algorithm and implement for SAR images[J].Journal of Electronics and Information Technology,2005,27(2):6-9.
[7]于秋则.合成孔径雷达图像匹配导航技术研究[D].武汉:华中科技大学,2004.Yu Q Z.Research on synthetic aperture Radar(SAR)image matching for navigation[D].Wuhan:Huazhong University of Science and Technology,2004.
[8]Long X,Wu X Q.Motion segmentation based on fusion of MSRF segmentation and canny operator[J].Procedia Engineering,2011,15:1637-1641.
[9]Canny J.A computational approach to edge detection[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,1986,8(6):679-698.
[10]Jaseema Y J H,Mohamed S M,Zulaikha B S.Robust segmentation algorithm using LOG edge detector for effective border detection of noisy skin lesions[C]//International Conference on Computer,Communication and Electrical Technology-ICCCET 2011.
[11]Zhang Z,Zhao G.Butterworth filter and sobel edge detection to image[C]//2011 International Conference on Multimedia Technology,Hangzhou:ICMT,2011:254-256.
[12]Zhang J G,Liu J J,Geng Y J.Laplacian image edge detection based on secondary-sampling wavelet transform[C]//2010 3rd International Congress on Image and Signal Processing:Yantai:CISP,2010:1059-1062.
[13]吕金建,文贡坚,王继阳,等.一种改进的基于不变描述子的图像自动配准方法[J].信号处理,2009,25(2):216-222.Lyu J J,Wen G J,Wang J Y,et al.An improved automated image registration method based on invariant descriptors[J].Signal Processing,2009,25(2):216-222.
[14]杨秋菊,肖雪梅.基于改进Canny特征点的SIFT算法[J].计算机工程与设计,2011,32(7):2428-2431.Yang Q J,Xiao X M.Improved SIFT algorithm based on canny feature points[J].Computer Engineer and Design,2011,32(7):2428-2431.
[15]李伟生,王卫星,罗代建.用Harris-Laplace特征进行遥感图像配准[J].四川大学学报:工程科学版,2011,43(4):89-94.Li W S,Wang W X,Luo D J.Remote sensing image registration by using Harris- Laplace features[J].Journal of Sichuan University:Engineering Science Edition,2011,43(4):89-94.