车载LiDAR点云数据分割与半自动化建模方法
2014-09-26张正鹏
朱 红,张正鹏
(辽宁工程技术大学测绘与地理科学学院,阜新 123000)
0 引言
20世纪80年代末,激光扫描技术的诞生为获取高分辨率空间信息提供了一种重要技术手段,并广泛应用于城市规划、工业生产以及测绘等多个领域。利用激光扫描技术,可以连续、自动地获取激光雷达(light detection and ranging,LiDAR)点云数据。车载激光扫描系统为激光扫描系统中的一种,由于其搭载平台以及作业方式等特点,特别适用于获取建筑物、道路和隧道等城市地物表面信息,能快速获取城市地物的三维空间信息,并可结合地面二维平面数据进行三维城市建模[1-2]。
国内外很多学者对车载LiDAR点云数据的三维重建进行过深入研究,但都集中在地表模型的自动重建上,对于复杂街景的模型重建方法,还主要依赖于人工交互或半自动化处理。Zhao等[3]提出基于车载LiDAR数据的自动化CAD模型构建方法——从激光距离数据中生成几何模型,在此基础上提取诸如建筑物、地面及树木等城市特征地物;不同的地物采用不同的几何表现方式,比如平面、不规则三角网和三角形等。Grinstead等[4]提出对车载LiDAR数据的三角网构建和简化方法。江水等[5]提出对相邻2条扫描线数据构建三角网,进而完成整个带状地物表面快速重建的方法。卢秀山等[6]则提出基于地面图像的建模系统和基于地面与空中图像相结合的建模系统。然而,由于各个车载LiDAR系统的硬件不同,数据也不同,上述方法都是针对各自的系统,而且不是针对整个城市地物的完整重建。
纵观国内外研究现状,由于街景环境复杂,在车载系统获取的LiDAR点云数据中存在大量的噪声(如车辆、人群等),学者们提出了许多基于车载LiDAR点云数据的分割方法[7-8]。由于树木等遮挡导致的建筑物立面信息不完整及车载固有的建筑物顶面信息无法获得等问题,如何实现自动化的分割与重建仍是研究的难点。本文结合现有的自动分割方法和建模软件,采用人工交互式方法并辅以图像纹理信息,提出了一种基于车载LiDAR点云数据的分割与半自动化建模方法;并通过实验证明该方法简单实用,具有建模的完整性和较强的可靠性。
1 车载LiDAR点云数据
1.1 数据获取
拓普康IP-S2移动测量系统主要由IP-S2主控单元、激光扫描仪、360°全景相机及其控制系统和电源系统组成,其中3个2D激光扫描仪能够获取道路路面及其两侧的高分辨率3D点云数据。
LiDAR点云数据在内容和形式等方面具有其自身的特点:①在形式上呈离散分布;②具有反射强度信息;③呈扫描线排列方式;④具有盲目性[9]。另外,由于测量系统固有的量测视角局限性,总是难以获取场景的完整三维数据。因此车载系统难以对目标的顶面和周围4面做完整的扫描,而且存在树木等其他地物的遮挡问题(图1)。

图1 LiDAR点云数据的不完整性Fig.1 Incompleteness of LiDAR point cloud data
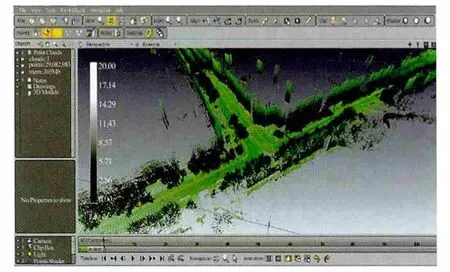
图2 用Pointools稀化点云的显示Fig.2 Display of point cloud sparseness using Pointools
1.2 数据预处理
实验采用IP-S2车载系统获取的LiDAR点云数据,并经过前端采集软件的配准处理,获得完整的街景三维点云数据(*.ips格式)。经过地理坐标编码,将原始WGS84坐标转换为北京54坐标,导出点云的存储格式为北京54坐标系统下的文本格式(*.txt格式),每个点用其三维坐标、强度和颜色信息(X,Y,Z,Intensity,R,G,B)表达。本文使用的是转换后的.txt格式点云数据,并针对不同街景地物完成后期的三维建模。
在LiDAR点云数据的重采样中,由于车载LiDAR点云数据量十分庞大,导致软件对数据处理的速度被大大降低;为了高效完成后续点云数据建模,需要使用 Pointools软件对点云数据进行“稀化”,即根据建模精度要求,对不同地物的重采样设置不同的格网间距。城市道路大多比较平坦,一般可设置格网间距为0.1 m;而对建筑物则需要设置0.01 m的格网间距进行重采样(图2)。
2 数据分割与半自动化建模
2.1 技术流程
本文建立的车载LiDAR点云数据分割与半自动化建模技术流程见图3。
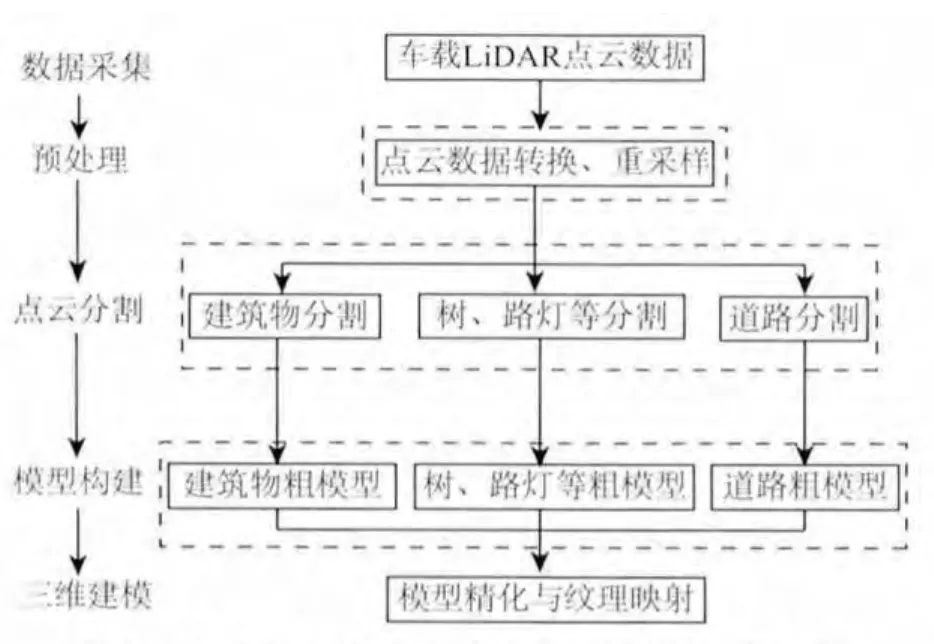
图3 点云数据分割与半自动化建模技术流程Fig.3 Technical flowchart of point cloud data segmentation and semi-automatic modeling
现将点云数据分割与半自动化建模技术流程简述如下:
1)数据采集。采用拓普康IP-S2移动测量系统完成街景LiDAR点云数据的获取。
2)数据预处理。将LiDAR点云数据转换成标准格式,并对数据进行重采样。
3)点云分割。充分利用各类地物的特性,对不同地物使用不同的点云数据分割方法,最终实现LiDAR点云数据的分割。
4)模型精化。以车载和航空图像的纹理信息为基础,辅助完成建筑物的立面和顶面点云模型的精化。
5)三维建模。基于精化后的LiDAR点云数据以及建筑物的特点,利用SketchUp软件完成街景模型的重建。
2.2 数据分割
街景三维重建是建立在准确分割点云数据的基础上。针对城市街景,主要分为道路分割、建筑物分割、树和路灯等附属设施分割[10-11]。
1)道路分割。首先将LiDAR点云数据生成栅格模型(图4),然后根据栅格模型的高程值进行滤波处理,得到道路点云数据。道路可以认为是地表,且具有平面特征。
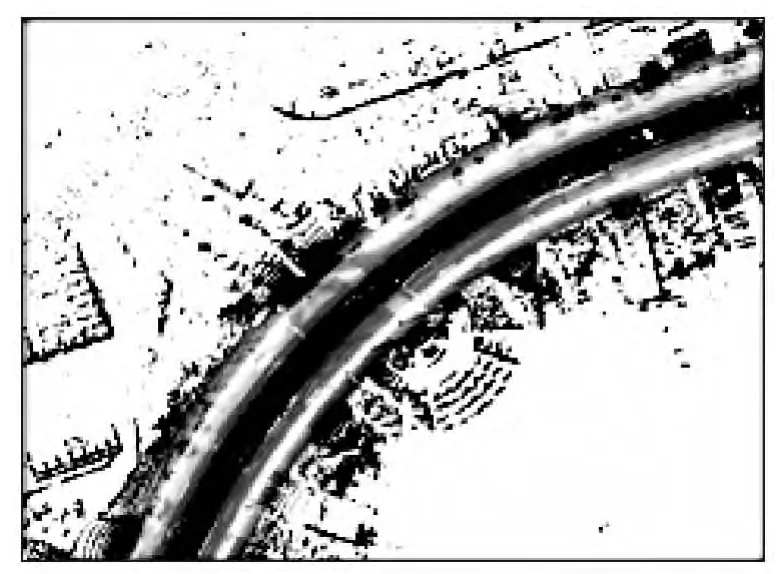
图4 道路点云栅格模型Fig.4 Raster model of road point cloud
以地表高程最小、在一定范围内高程平滑作为约束条件,可实现道路地表的自动分割(图5)。

图5 道路点云分割Fig.5 Segmentation of road point cloud
2)建筑物分割。在道路分割的基础上,使用Cyclone软件,利用建筑物自身的属性信息(如高程值特性),可以实现建筑物的分割。如果分割中仍带有其他噪点,可以再次进行人工去噪,分割出建筑物区域。由于车载LiDAR点云数据无法扫描建筑物顶面或背面信息,往往导致建筑物点云不完整(仅保留部分立面信息)。图6示出分割后建筑物局部点云图。

图6 建筑物点云Fig.6 Point cloud of buildings
3)附属设施分割。树和路灯等典型的街景附属设施一般较难实现自动分割,需要人工判读,进一步人工去除噪点信息,才可较为准确地提取出附属设施的点云数据;而且在分割道路和建筑物点云数据的基础上,点云数据将以附属设施为主,这也相对减少了附属设施人工提取的工作量(图7)。

图7 附属设施点云Fig.7 Point cloud of subsidiary facilities
2.3 半自动化建模
在点云分割的基础上,完成道路、建筑物与树和路灯等附属设施的建模。
1)道路建模。基于自动准确提取的道路点云数据,对道路点云进行三角网模型处理,同时辅以图像纹理信息完成街景道路的三维建模。
2)建筑物建模。由于自动分割后的建筑物主要以立面信息为主,利用图像的纹理信息辅助完成建筑物立面和顶面的三维建模。本次实验采用成熟的建模软件和方法,使用SketchUp软件完成点云数据的导入、独立坐标系的定义、面的挤压与拉伸、窗户阳台的细节建模以及纹理映射等过程,实现了建模的完整性和较强的准确性。
3)附属设施建模。树和路灯等附属设施的建模以点云提供的基点为基准,不要求实际模型的重建,只要插入现有的虚拟模型即可,最终得到附属设施的三维重建结果(图8)。
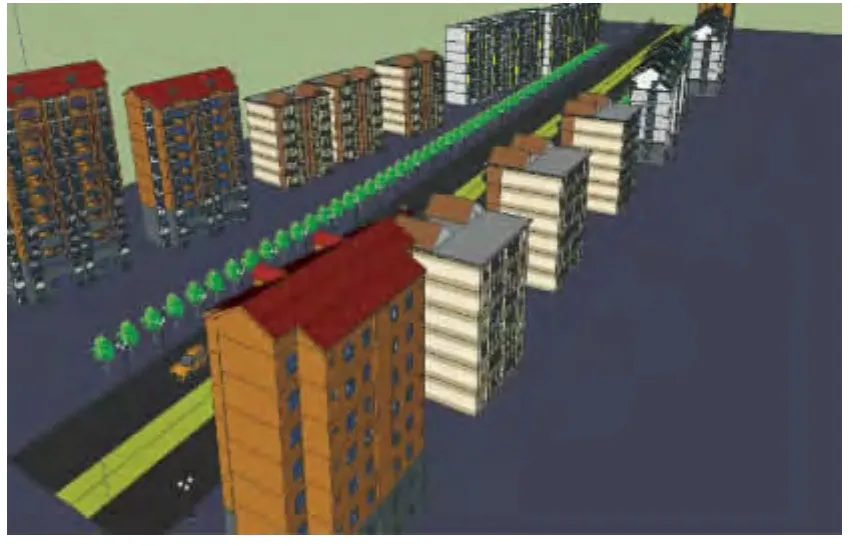
图8 局部街景三维模型Fig.8 3D model of local streetscape
2.4 建筑物模型精化
在车载激光系统扫描过程中会出现被测物体表面数据丢失的问题,其原因主要有3个方面[12]:①扫描过程中各个物体由于其自身空间拓扑结构产生的遮挡(这也是补洞的重点所在);②被测物体表面不良的反射特性(对之后的模型重建没有影响,可不考虑);③三维激光扫描仪自身的缺陷和误差(比如扫描距离不够时,扫描就会产生杂点)。
目前对于LiDAR点云的精化处理主要基于自身数据,通过统计模型得出被测目标表面较为完整的数据描述。本文从LiDAR数据本身出发,采用图像纹理辅助建模,利用纹理图像的信息及建筑物纹理的重复性,在建模过程通过复制、移动、镜像等操作完成模型的精化,实现对有树木等遮挡的建筑物的重建方法(图9和图10)。
图9 立面不完整的建筑物点云Fig.9 Point cloud of incomplete facade building

图10 修复后建筑物模型Fig.10 Repaired building model
上述方法对解决车载LiDAR点云扫描过程中其他地物遮挡建筑物的问题也很有效。另外,对于建筑物顶面无完整数据的处理,本次实验主要采用航空或遥感卫星图像辅助建模,利用建筑物的顶面纹理信息等,用人工方法完成三维建模的工作(图11和图12)。
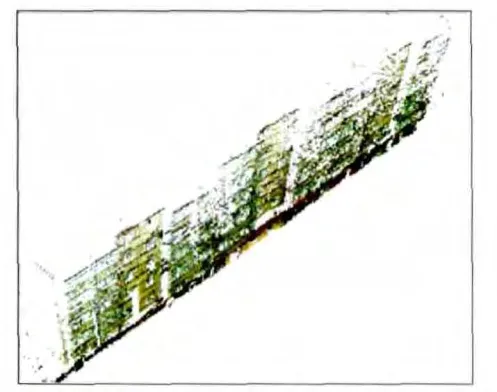
图11 顶面不完整的建筑物点云Fig.11 Point cloud of top surface of incomplete building
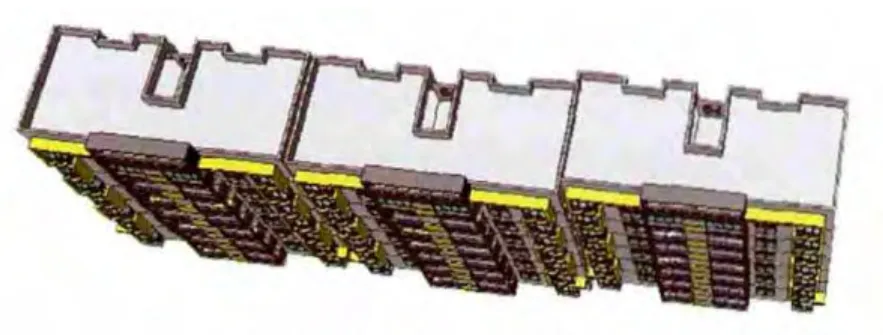
图12 修复后建筑物模型Fig.12 Repaired building model
3 结论
1)本文结合车载激光雷达(LiDAR)点云数据的获取方式和街景离散点云数据的特点,基于不同地物的属性和特征,对街景点云数据进行快速分割处理;并在分割的基础上对模型进行精化,完成了道路、建筑物及树和路灯等附属设施的三维重建。实验结果表明,本文提出的LiDAR点云数据的分割与建模方法比较简单,实现了道路和建筑物的半自动化分割;同时利用了成熟的建模软件和方法,达到了建模的完整性,而且具有较强的可靠性。
2)LiDAR点云数据的高精度和快速分割直接影响后期三维建模的精度与效率,因此,全自动化的分割方法还有待进一步研究。另外,由于实验数据的限制,本文没有涉及复杂造型或弧形等不规则表面的建筑物的重建问题。如何更高效、更准确地完成对车载LiDAR点云数据的三维重建,仍是今后的一个研究方向。
[1]Brenner K,Haala N.Rapid acquisition of virtual reality city models from multiple data sources[J].IAPRS,1998,32(5):323-330.
[2]Haala N,Brenner C,Stätter C.An integrated system for urban model generation[C]//Proceedings of ISPRS,Cambridge:ISPRS,1998:96-103.
[3]Zhao H J,Shibasaki R.Reconstructing a textured CAD model of an urban environment using vehicle-borne laser range scanners and line cameras[J].Machine Vision and Applications,2003,14(1):35-41.
[4]Grinstead B,Koschan A,Page D,et al.Vehicle-borne scanning for detailed 3D terrain model generation[C]//Proceedings of SAE Commercial Vehicle Engineering Congress,Chicago,USA:SAE,2005:210-218.
[5]江 水,盛业华,李永强.基于车载激光扫描的带状地物表面快速重建[J].地球信息科学,2007,9(5):19-23,30.Jing S,Sheng Y H,Li Y Q.Rapid surface modeting of large strip objects based on vehicle-borne laser scanning[J].Geo-Information Science,2007,9(5):19-23,30.
[6]卢秀山,李清泉,冯文灏,等.车载式城市信息采集与三维建模系统[J].武汉大学学报:工学版,2003,36(6):76-80.Lu X S,Li Q Q,Feng W H,et al.Vehicle-borne urban information acquisition and 3D modeling system[J].Journal of Wuhan University:Engineering Version,2003,36(6):76-80.
[7]Li B J,Li Q Q,Shi W Z,et al.Feature extraction and modeling of urban building from vehicle-borne laser scanning data[J].ISPRS Journal of Photogrammetry and Remote Sensing,2004,35:934-939.
[8]Haala N,Brenner C.Extraction of buildings and trees in urban environments[J].ISPRS Journal of Photogrammetry and Remote Sensing,1999,54(2/3):130-137.
[9]潘建刚.基于激光扫描数据的三维重建关键技术研究[D].北京:首都师范大学,2005.Pan J G.Based on the research on the key technologies of laser scanning data of three dimensional reconstruction[D].Beijing:Capital Normal University,2005.
[10]戴 彬.基于车载激光扫描数据的三维重建研究[D].北京:首都师范大学,2011.Dai B.Research on 3D reconstruction of data based on vehicleborne laser scanning[D].Beijing:Capital Normal University,2011.
[11]戴 彬,钟若飞,胡 竞.基于车载激光扫描数据的城市地物三维重建研究[J].首都师范大学学报:自然科学版,2011,32(3):89-96.Dai B,Zhong R F,Hu J.Research on 3D reconstruction of urban features from data based on vehicle-borne laser scanning[J].Journal of Capital Normal University:Natural Sciencces Edition,2011,32(3):89-96.
[12]王华建,张爱武,马惠敏,等.基于统计模型的三维场景重建补洞算法[J].光电子·激光,2004,15(10):1234-1237.Wang H J,Zhang A W,Mang H M,et al.Hole filling in range image processing based on statistical model[J].Journal of Optoelectronics·Laser,2004,15(10):1234-1237.