基于红外传感原理的无人机姿态测量系统设计*
2014-09-25李晓雨马春林褚金奎
李晓雨, 马春林, 支 炜, 褚金奎
(大连理工大学 精密特种加工教育部重点实验室,辽宁 大连 116023)
0 引 言
无人机稳定控制和导航的最基本、最核心的参数之一是姿态角。传统姿态测量方法主要是惯性测量系统,但由于其硬件系统设计复杂,成本较高,陀螺仪在长时间工作时还存在累积误差,因此,想低成本地完成无人机自主控制仍旧比较困难[1]。考虑到红外温度传感器能感知天空地面间的热辐射的特点,本文提出一种新型的测量姿态信息的方法,相比传统姿态测量系统,其具有体积小、重量轻、成本低等特点。采用新型的ARM Cortex—M3内核微处理器STM32F103ZET6作为处理单元,使用两对红外温度传感器对飞机的俯仰和横滚信息进行姿态捕获,实验表明:该方法能有效满足一般无人机姿态测量的需求。
1 硬件设计
飞机的稳定性是飞机设计中最为重要的参数,它直接表征飞机在受到扰动后恢复到原始状态的能力。其中,飞机的稳定性包括纵向、横向和航向稳定性,分别反映俯仰、滚转及方向的稳定特性。本文所设计的基于红外传感原理的无人机姿态测量系统是无人机飞行控制系统的重要组成部分之一,主要针对飞机飞行中在纵向和横向稳定性的控制。无人机飞行控制系统硬件平台如图1,主要由红外传感器、气压传感器、处理器、执行机构、遥控接收机、电台等部分组成。其中处理器作为数据处理和飞行控制的核心,主要完成采集各只传感器的数据,对数据进行综合处理并解算出飞机的姿态,从而实现对飞机稳定飞行的控制。综合数字信号处理能力和体积大小,选择性价比较高的STM32F103ZET6型微处理器作为主控模块,可使用其内部A/D转换口接收信息,经计算产生多路PWM信号驱动执行机构,用以调整飞行姿态[2]。传感器单元包括两对红外传感器和气压传感器构成,主要完成对飞行中的姿态和高度信息的采集。地面控制用以稳定飞行中的模式切换和危险保护。
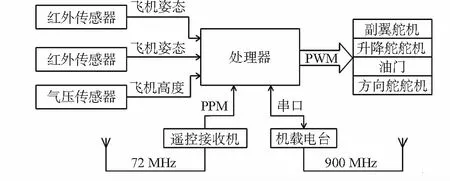
图1 飞控系统结构框图
2 红外传感器设计
2.1 MLX90247型红外线温度传感器
MLX90247型红外线温度传感器是由集成电路组成并且能够检测很小的热量辐射,包括热吸收区(热端)、硅基片(冷端)及外封装组成。基本工作原理类似于普通的热电偶原理,也即吸收红外线能量后输出一个与温度呈相应比例的电压信号。有效感知-20~85 ℃的温度变化范围,视角范围约100 ℃,使其可探测视角范围内所有物体的温度值,距离为无穷远。在探头附件放置滤光片后可有效反射太阳光等其他波长的光线,大大提高了飞行中的抗干扰能力。
2.2 红外传感器设计
红外温度传感器测量姿态的主要原理是根据地面与天空的温度差来估计无人机的倾斜程度,亦即无人机的姿态信息。由于天空的温度比地面的温度低,在没有干扰的情况下,2只红外温度传感器反方向放置在同一水平面,其两端感知到的视角内的温度值相同[3]。图2所示当倾斜使得左端偏向地面,右端偏向天空,这样将测得左边传感器温度远远高于右边,即可计算出倾斜角度的大小[4]。

图2 红外平衡工作示意图
结合红外传感器良好的视场角范围并基于上述原理,设计由两对红外温度传感器组成的红外线平衡系统,水平安置于机身且与机翼中心轴线成45°,综合测量无人机俯仰与横滚信息[5]。当飞机水平飞行时,两对相反放置的传感器感知到相同温度,输出电压值也相同,处理器判断此时的电压差为基值电压,飞行状态为稳定。而当飞机不稳定飞行时,两端感知温度不同,输出的电压差也不处于基值电压,此时电压差值由处理器A/D转换后进行判断飞行姿态,进而通过向舵机输出PWM信号做出相应的调整。
图3是基于上述原理设计的红外传感器板,电路使用5 V供电并由2.5 V作为基准电压,这样传感器水平放置输出理论为2.5 V,正倾和负倾分别向0 V和5 V电压靠近。设计的红外传感器板通过实验寻找出温度与倾角间的关系,确定相应的函数模型。实验仪器主要有水平转台、红外传感器板、万用表等。选择户外开阔的场地,避免其他干扰热源的影响,分别在不同温度,不同时间段进行测量。将水平传感器固定于转台上,测量从-90°~90°范围间,每旋转10°记录一次数据,由于飞机大部分处于稳定飞行状态,故在-50°~50°范围间,每旋转5°记录一次数据。由多组实验数据,绘出散点图并进行曲线拟合 ,曲线如图4所示。图中A是天阴,温度为4 ℃;B是天晴,温度为6 ℃;C是天阴,温度为9 ℃;D是天晴,温度为10 ℃。由大量数据绘成的曲线图可看出,单对红外传感器其倾角与电压存在函数关系式
U=Asin(Kφ)+B.
(1)

图3 红外传感器板实物图

图4 实验数据拟合曲线图
由曲线图可看出:该函数关系式中B与水平电压有关,理论值为2.5 V,A与垂直电压有关,理论值为(Vmax-2.5)V,而K可通过大量输出电压进行解算。
对表1中的多次实验所解算的K值取平均值得K=-1.407,为此得到了由红外传感器的输出电压解算对地倾角的经验公式
U=(Vmax-2.5)sin(-1.407φ)+2.5.
(2)
实际飞行中,可由当地环境测量出垂直电压后确定上述公式,进行飞行实验。

表1 红外传感器测量数据
2.3 姿态角解算
红外传感器测量的倾角φ是对地的倾角,无人机的姿态角是在机体坐标系下定义,而且上述以说明红外传感器板与飞机的机头机尾轴线成45°安置,这样必须进行相应的姿态角解算以确定无人机正确的姿态信息。
图5所示为红外传感器板安装示意图,由红外传感器A与B测量的电压为UA,UB,由公式(2)可解算出该对传感器对地倾角φA,φB,引入方向余弦矩阵(DCM)进行地面坐标系到机体坐标系的转换可导出俯仰角θ和滚转角φ,亦即[6]
(3)
由式(2)、式(3)可确定无人机的姿态角,通过机载实验,将测得的姿态信息与传统惯性测量单元(IMU)进行数据比对,以此验证红外传感器的可行性与精确性。

图5 红外传感器在无人机上的安装
3 机载实验
为了验证上述算法与相关理论,将红外传感器与传统IMU一同安装在小型固定翼无人机上进行机载飞行实验。实验场地选择空旷的操场以避免地面其他热源干扰,气候适宜,正午晴天15℃时。实验测量输出曲线如图6(a)和图6(b)所示,其中,1#实线是红外传感器测量数据,2#实线是IMU所测量数据。
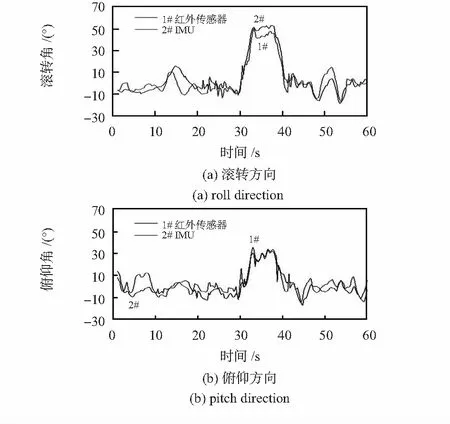
图6 滚转和俯仰方向姿态信息输出曲线图
图6(a)和(b)分别是同时段的滚转运动曲线和俯仰运动曲线,由图所测数据可知,前30s期间飞机基本稳定飞行,此时IMU与红外传感器测量数据误差保持在10°以内;30s后飞机转弯,此时姿态发生大角度的变换,红外传感器所测量数据也能控制在理想范围内;之后又继续稳定飞行。整个直飞、转弯、在直飞的过程可以看出红外传感器均能有效感知姿态信息的变化,并且与传统的IMU相比测量误差均能满足试飞要求。
实验截取的是当中一段数据进行分析,在起飞和降落时,飞机发生大幅度的姿态变化,此时数据会有较大的震荡,其余过程均在允许范围内。由于太阳辐射功率比地球辐射功率大数百倍,很可能会进入红外视场,干扰红外传感器工作的光谱波段,这严重影响了红外传感器的正常工作。在红外传感器的4只红外探头前端分别贴上红外滤光片,该滤光片可有效减弱可见光干扰,使得传感器测量的姿态信息能够更加接近真实值,使更有效地适应多种环境,实验测量数据显示说明该设计方案可行。
4 结 论
本文分析红外传感原理并自行设计红外传感器应用于无人机姿态测量方向,通过场地实验寻找倾角与电压关系,建立函数模型,进一步坐标变换找出测量信息与姿态角的关系。在红外探头前端放置滤光片有效抑制太阳干扰情况下,进行机载飞行实验,通过与传统IMU测量的姿态信息做比对验证设计的可行性。实验结果表明:该红外传感器能有效反映无人机飞行过程中的姿态信息,准确度和灵敏度均较高,对低成本无人机飞控系统提出了一种新的方案。
参考文献:
[1] 唐 强,朱志强,王建元.国外无人机自主飞行控制研究[J].系统工程与电子技术,2004(3):419-422.
[2] 梅羡林.基于ARM的嵌入式SUAV飞控系统设计与实现[D].南京:南京航空航天大学,2008.
[3] Di L,Chao H,Chen Y Q.A two-stage calibration method for low-cost UAV attitude estimation using infrared sensor[C]∥2010 IEEE/ASME International Conference on Mechatronics and Embedded Systems and Applications(MESA),IEEE,2010:137-142.
[4] 张鹏翼,罗卫兵,楼超英.红外传感器在无人机姿态平衡设计中的应用[J].电光与控制,2007,14(6):171-171.
[5] Tayler B,Bil C,Watkins S.Horizon sensing attitude stabilization:A VMC autopilot[C]∥The 18th International UAV Systems Conference,Bristol,UK,2003.
[6] 陈天华,郭培源.小型无人机自主飞行控制系统的实现[J].航天控制,2006,24(5):86-90.
