双电机控制系统在吊放电缆寿命试验台中的应用方案
2014-09-23张争气
潘 璐 ,张争气
(西北工业大学 陕西 西安 710072)
双电机控制系统在吊放电缆寿命试验台中的应用方案
潘 璐 ,张争气
(西北工业大学 陕西 西安 710072)
主要阐述了吊放电缆寿命试验台电机控制系统的硬件部分设计方案,其主要采用双直流电机和美国德州仪器公司的TMS320F2812构成控制系统,包括电源电路、PWM产生电路、DSP外围电路、速度控制及检测电路等硬件模块设计。该控制系统能同时驱动两台直流电机,并能精确实现同步控制。
双直流电机;DSP;TMS320F2812;控制系统
吊放声纳主要装备在反潜直升机上,用吊放电缆将声呐探头垂入水中探测目标。用于对潜艇、水雷等的探测和定位。它主要由探头、电子机柜、吊放电缆及其收放装置3部分构成。吊放电缆及其收放装置包括吊放电缆、鼓轮、绞车及转动装置,用于控制吊放电缆及探头的收放。在探测工作中,当直升机在探测点上低空悬停时,声呐探测器需要用吊放电缆通过绞车送入水中,电缆随洋流等条件不断摆动。在这一过程中对吊放电缆的损伤非常大。目前尚没有针对电缆与滑轮磨损并模拟水下分机随洋流摆动的实验设备。传统的做法是在不考虑电缆摆动的情况下来确定吊放电缆的使用寿命。
文中是以DSP及双直流电机构成的系统为研究对象,主要针对吊放电缆的收放及吊放电缆的摆动系统,以实现两台电机联动工作的功能。当一台电机发生故障时另一台电机同时停止工作。
1 双电机联动控制系统
控制系统主要由两台无刷直流电动机构成,额定转速为1 500 r/min,额定功率为4 kW,主要用于收放电缆和模拟电缆摆动,因此需要两台电动机联动工作,而且能够根据所需各自调节转速,已达到两台电机联动的目的。
无刷直流电机的控制系统主要分为控制电路部分、转子位置检测、驱动电路、逆变电路部分及电流采样电路等几部分。此控制系统的核心部分主要是TMS320F2812芯片,它主要承担控制运算、模拟采样等任务。其中TMS320F2812以其事件管理器模块最为突出:由于它有EVA和EVB两个事件管理器,因此可以输出8个16位脉宽调制(PWM)信号。本控制系统就是借助这一突出特点来设计的,在PWM波的输出上相当简单方便;可编程的PWM死区可以避免上下桥臂同时输出触发脉冲造成的直通;控制电路输出的弱电信号被驱动电路功率放大,输出驱动能力强的电信号来控制逆变电路的开关管,供给电动机交流电,实现控制电动机的目的;位置检测电路用来检测电动机的转子信号,并输送给控制电路来处理;电流采样电路主要完成对直流电源电流的检测工作。本控制系统外围器件减少,设计难度小,高性能传感器检测电路的采用,使系统稳定性和精度大大提高。
2 无刷直流电动机控制系统
无刷直流电动机的控制主要是换相,其控制方法为双环调速系统,外环为速度环,内环为电流环,经过双环调节,得所需的PWM信号,信号控制哪个开关管由霍尔检测信号决定。其无刷直流电动机控制系统如图1所示。
3 控制系统的硬件方案设计
控制板以TMS320F2812为核心,一些外围电路和接口组成。该系统主要是实现控制指令的接收与执行,电流采样信号接收与转换,速度信号的接收与处理,电流闭环与速度闭环控制算法的运行。系统硬件电路如图2所示。

图1 无刷直流电动机控制系统Fig.1 Brushless dc motor control system

图2 系统硬件电路Fig.2 System hardware circuit
3.1 TMS320F2812主要性能
TMS320F2812芯片非常适用于电机控制等场合,它是目前市场上最强大的定点32位DSP芯片。采用了先进的哈佛总线结构,将程序空间与数据空间分隔,数据的吞吐率提高了整整一倍。
电机控制主要采用片上的两个事件管理器EVA和EVB。T1和T2两个通用定时器产生两个六路PWM波形正好可以驱动两个三相桥电路。用捕获单元CAP1-6来捕获外部输出脉冲的上升沿和下降沿,已达到计数和调速的目的。同时TMS320F2812有两个12位AD转换模块对电机输出的电流信号和电压信号进行存储和转换。
3.2 驱动电路
无刷直流电动机不同时刻各相的通断状态是由自身的霍尔传感器各相位置信号所决定。DSP芯片产生PWM信号并放大后,用来控制逆变电路中的开关管状态。逆变电路输出需要的控制信号驱动电机转动。本系统选择了专用集成功率驱动芯片IR2131,该芯片只需要一个供电电源就能驱动三相桥式逆变电路的6个MOSFET管,进而让驱动电路变得可靠简单。IR2131内部设计有过流、过压及欠压保护。驱动部分电路如图(3)所示,其中PWM1-6是由DSP输出的波形信号,U、V、W分别接到电动机的不同相。
驱动电路采用24 V电压,采用三相全桥与电机连接。PWM调制方法为软斩波方法,当导通时,下桥臂功率管状态保持为打开,上桥臂功率管由 信号控制其开关。集成功率开关器件采用HITACHI公司的6AM15,由3个N MOSFET管和P型MOSFET管组成三相全桥功率开关电路。从而提高了系统的集成度,使电路板面积减小。其中每个MOSFET管带有的二极管使其在关闭期间起到反向续流作用,提高了系统的稳定性。
功率驱动部分电路框图如图3所示。L01、L02、L03代表三路低侧输出,H01、H02、H03代表三路高侧输出。
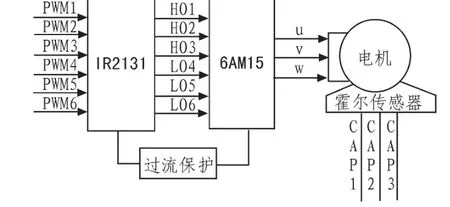
图3 功率驱动部分电路框图Fig.3 Power drive part of the circuit
3.3 外围电路设计
3 .3 .1 霍尔检测电路
对于无刷直流电动机,电动机上集成霍尔元件,即转子位置传感器上带有霍尔元件,传感器输出H1、H2、H3三个脉冲信号用于检测转子所在位置。电机驱动电路中的功率管的导通顺序是依据转子位置信号改变的,控制电动机转动方向和转速,因此,实际霍尔检测信号的获取在无刷直流电动机控制中至关重要。传感器的输出信号经过整形后送入DSP的CAP单元,在每个上升或下降沿的CAP口的状态决定转子的位置和速度,从而实现电动机正确换相和电动机速度的调节。利用CAP1-3和CAP4-6为EVA和EVB单元中的霍尔信号采样端口,实现霍尔信号检测。
3 .3 .2 电压检测电路
电压检测电路主要检测电源输出电压及直流母线电压。采用电阻分压方法对母线电压进行检测。电阻分压后取母线电压的1/10,经隔离运放后送入AD采样口,实现过压保护。过压阈值设定为27 V,若母线电压大于27 V,比较器输出低电平,进而触发故障保护。
欠压故障检测开关电源12 V输出电压,当开关电源12 V输出电压小于10 V时,则为欠压,若发生VCC欠压,则欠压检测器快速速翻转,故障逻辑处理单元输出低电平。
3.4 其他外围电路设计
该系统的外围电路包括RS232通讯电路、JATG仿真接口电路、手动复位电路、晶振电路等。在这里只介绍下RS232通讯电路。RS232电平转换芯片MAX3232E,它只支持3.3V低电压;连接头则采用标准的9针插头。
4 结论
文中提出了一套完整的双电机联动步控制系统的硬件方案,采用TI公司的TMS320F2812作为主处理器,整个系统的集成度高,易于设计应用。一个控制器同时控制两台电动机完全取决于TMS320F2812有两个功能相同的EV模块,本设计节省了成本,为实现吊放电缆寿命试验台的双电机同步控制提供了稳定的硬件系统。该系统可以将控制系统和实际的控制策略相结合,实现不同的控制功能,故应用较为广泛。
[1]王晓明,王玲.电动机的DSP控制—TI公司DSP应用[M].北京北京航空航天大学出版社,2004.
[2]陈忠,吴靓.基于DSP的双电机同步控制系统在中小水电站中的应用方案[J].中国农村水利水电,2010(3):1-2.
CHEN ZHONG,WU JING.Double motor synchronous control system based on DSP application in small and medium-sized hydropower station scheme[J].China's Rural Water Conservancy and Hydropower,Preceding,2010(3):1-2.
[3]Wang YF,Xia CL.Adaptive speed control for brushless DC motors based on genetic algorithm and RBF neural network[J].IEEE International Conference on Control and Automation,China,2007,1210-1216.
[4]Texas Instruments.TMS320C28X DSP Controllers System and Peripherals Reference Guide [M]. Beijing: Texas Instruments,2002,21-33.
[5]苏奎峰,吕强,耿庆峰,等.TMS320F2812原理与开发[M].北京:电子工业出版社,2005.
[6]顾卫钢.手把手教你学DSP—基于TMS320X281x[M].北京:北京航空航天大学出版社,2011.
Double motor control system in the application of sling the cable life test rig
PAN Lu,ZHANG Zheng-qi
(Northwestern Polytechnical University,Xi’an 710072,China)
Mainly expounds the sling the cable longevity test-beds motor control system design of the hardware part,it mainly adopts the TMS320F2812 of ti and double dc mechanism into control system,including power circuit,PWM circuit,DSP peripheral circuit,speed control and detection circuit hardware module design,etc.The control system can be driven by two dc motors at the same time,and can be accurate synchronization control.
double Dc motor;DSP;TMS320F2812;control system
TN710.9
A
1674-6236(2014)13-0094-02
2013-10-11 稿件编号:201310047
潘 璐(1987—),女,陕西西安人,硕士研究生。研究方向:声学与电子工程。
