基于FPGA的视频实时边缘检测系统
2014-09-23段哲民田志海
郭 龙,段哲民,陈 洋,李 茸,田志海
(西北工业大学 电子信息学院,陕西 西安 710129)
基于FPGA的视频实时边缘检测系统
郭 龙,段哲民,陈 洋,李 茸,田志海
(西北工业大学 电子信息学院,陕西 西安 710129)
于对视频图像检测与识别的需要,提出了一种基于FPGA的视频边缘检测系统设计方案,并完成系统的硬件设计。通过FPGA控制摄像头进行视频采集,双端口SDRAM对图像数据进行缓存,FPGA再对数据进行实时处理。实际采用DE2-115开发板和CMOS摄像头OV7670为硬件平台进行验证。结果表明,该系统具有实时性高,检测准确的特点,达到了设计要求。
FPGA;OV7670;视频采集;边缘检测;VGA
随着科技的发展,视频采集系统越来越广泛的应用于各个领域,如体育直播,视频会议,导弹的电视制导等等。而图像边缘是图像的基本特征之一,其中包含了很重要的边界信息,这些信息是图像分析、目标识别的基础。在交通信息控制应用领域中,边缘检测已经是车牌识别、车流量监控、自动导航等技术中的重要环节。通过有效的边缘检测,可以大大简化后续图像处理过程对图像信息的分析工作[3]。对于视频图像的边缘检测,若采用软件方式实现由于受到系统处理速度的限制,容易出现断 帧现象,这对于要求实时处理的情况下将是一个很大的缺陷。硬件实现主要有基于专用芯片,基于DSP和基于FPGA的3种处理方式。基于专用芯片方式并不适合前期产品的开发。基于DSP方式在运算速度、数据吞吐量等方面有限制。本设计基于FPGA实现,边缘检测采用流水线结构[1]。实验结果表明,该系统十分适合视频数据的处理。
1 系统总体设计
本系统基于一片Altera公司的Cyclone IV系列的EP4CE115F29CN7主控FPGA,系统的整体结构框图如图1所示。主要包括:摄像头I2C配置模块、视频数据采集模块、SDRAM控制模块、Sobel边缘检测模块和VGA控制模块。
FPGA首先通过I2C总线完成对OV7670的初始化,然后将采集到的数据通过视频数据采集模块转换成RGB565标准的视频数据,图像数据通过FIFO_IN模块在SDRAM中进行缓冲,Sobel边缘检测模块通过FIFO_OUT模块读取数据并进行处理,VGA控制模块控制VGA接口的行同步和场同步信号完成VGA显示。

图1 系统整体结构框图Fig. 1 Structure diagram of the system
2 视频采集与边缘检测子模块
2.1 I2C配置模块
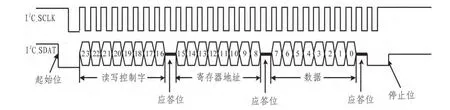
图2 I2C传输时序图Fig. 2 I2C timing diagram
本系统采用OmniVision公司的OV7670这一款CMOS传感器,为系统提供视频信号。通过SCCB(Serial Camera Control Bus)总线[7]对OV7670的共201个控制寄存器进行配置,来改变输出数据的格式、视频分辨率、传输方式,调整图像的白平衡、饱和度、色度、伽玛曲线等。两线制的SCCB总线与I2C总线相同,都是双向两线制同步串行总线。I2C传输时序如图2所示,I2C_SCLK就等同于SCCB中的SIOC、I2C_SDAT就等同于SCCB中的SIOD,模块每次传输24位数据,前8位为从设备地址(0x42代表写寄存器,0x43代表度寄存器),中间8位是从设备寄存器地址,最后8位是对寄存器进行配置的数据。
2.2 视频数据采集模块
视频数据采集模块,主要是通过FPGA配合CMOS摄像头OV7670的行、场同步信号采集图像数据。首先通过配置控制寄存器,控制OV7670输出视频数据为RGB565格式。因为OV7670数据位宽为8,视频数据采集模块主要是将采集到的前后2个8位数据合并成一个16位数据,以方便数据在SDRAM中的缓存以及后续模块的处理。如图3所示为数据采集ModelSim时序仿真图。
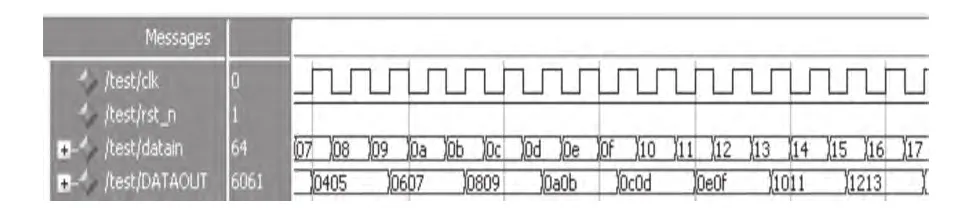
图3 数据采集时序仿真Fig. 3 Data acquisition timing simulation
2.3 SDRAM控制模块
SDRAM模块主要有FIFO和片外SDRAM两部分组成,因为CMOS摄像头OV7670采集的数据速率和SDRAM读写速率是不一样的,为了匹配这两个不同传输速率的模块,其中必须添加一个FIFO存储器。其中FIFO不需要单独通过语言描述得到,只需要通过MegaWizard工具配置得到。本设计中用到的SDRAM为DE2-115开发板上的两个64M字节SDRAM,其中每个SDRAM又包含4个BANK。SDRAM行地址线和列地址线是复用13位的地址总线,在读写时,先要激活某个BANK,接着锁存行地址,最后在读写指令有效时锁存列地址。SDRAM的最高读写速率可达到166 MHz,本系统中应用为100 MHz,同时每个时钟上升沿又可读写16 bit数据,因此SDRAM完全可以实现数据的无缝缓冲工作。
2.4 Sobel边缘检测模块
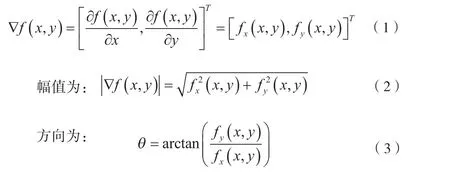
图像边缘是一幅图像中灰度变化比较剧烈的区域,计算灰度图像中各区域的梯度幅值可以用来判定图像的边缘信息。设图像的亮度为f (x , y),则梯度可以定义如下[2]:
Sobel边缘检测便是是基于梯度的检测,其利用Sobel算子如图4所示Gx与Gy,在3×3的图像邻域内和亮度数据做卷积运算,表达式如下[6]:
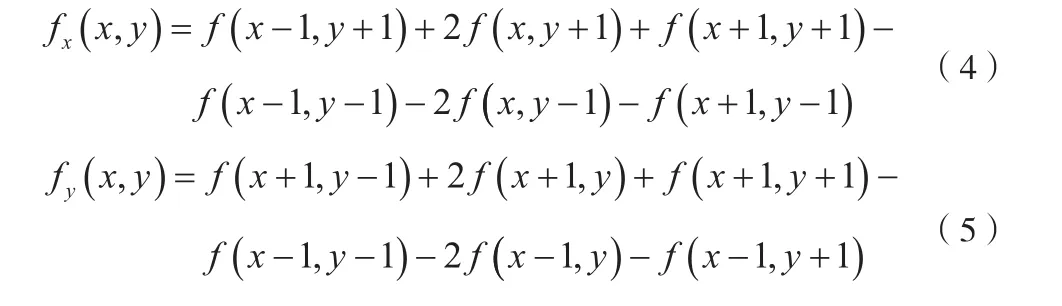
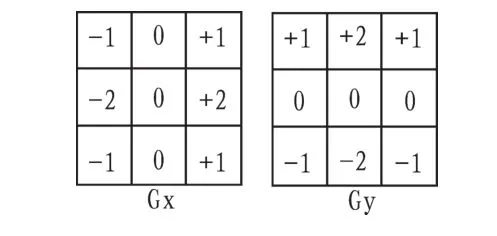
图4 Sobel梯度算子Fig. 4 Sobel gradient operator
用硬件左边缘检测,由于是实时处理,SDRAM中缓存的数据只是连续视频图像中一帧图像,而且视频数据还不停的从摄像头中传过来,因此就不能像软件处理那样先建立一个二维的数据阵列,这样就必须采用流水线方式进行运算,流水线数目和每次参加运算的像素数目相等,这里就总共需要9条流水线。为此我们就专门设计了3条Line_Buffer来完成式(4)与式(5)的运算,3条Line_Buffer由MegaWizard中配置的altshift_tab完成,altshift_tab实际上就是一个移位寄存器,因为视频分辨率为640×480像素,所以每条Line_Buffer实际是向后移位一整行,也就是640个像素值。这样就等同于3条Line_Buffer中的数据视频图像中相毗邻的三行图像数据,这3行数据再与Sobel算子做卷积。如图5所示为卷积运算硬件结构图,其中P9—P1为像素数据,X9—X1为Sobel梯度算子。乘法与并行加法部分分别有MegaWizard配置的altmult_add和parallel_add完成。
2.5 VGA显示模块
VGA显示器的显示采用逐行扫描,从屏幕左上方开始,从左到右,从上到下扫描。每一行的现实受到行同步信号
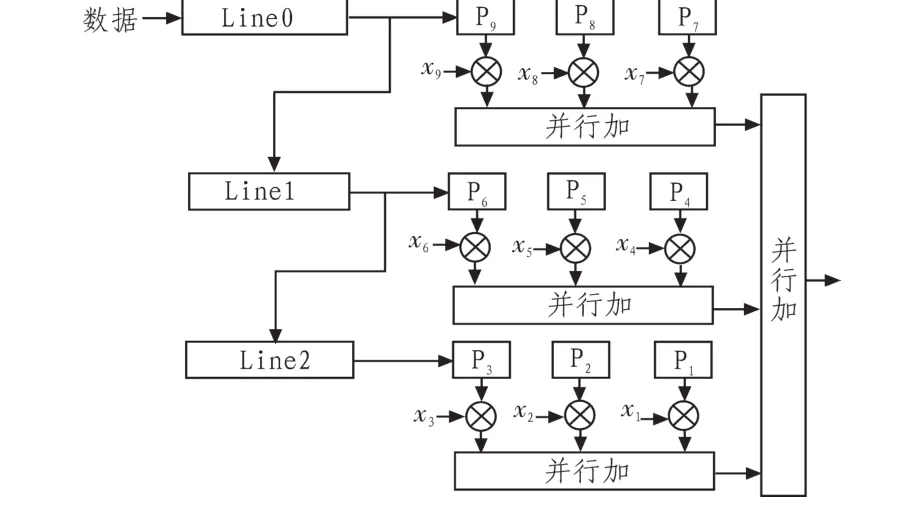
图5 卷积硬件结构图Fig. 5 Hardware structure of convolution
3 实验结果
(HREF)控制,每一帧的信号受到场同步信号(VSYNC)控制。本系统中CMOS摄像头采集图像分辨率为640×480像素,VGA(640×480)的工业标准为[4,8]行扫描:Ta(同步脉冲)=96,Tb (行消隐后肩)=40,Tc=8,Td (有效时序)=640,Te=80,Tf(行消隐前肩)=8,Tg(行周期)=800;场扫描:Ta(同步脉冲)=2,Tb(场消隐后肩)=25,Tc=8,Td(有效时序)=480,Te=8,Tf(场消隐前肩)=2,Tg(场周期)=525。图6为由SignalTapII抓取的VGA时序图,其中最后一行数据为当前一帧视频所显示的行数统计。

图6 SignaltapII抓取VGA时序图Fig. 6 SignaltapII capture VGA timing diagram完整顺畅,并没有断祯现象发生。
由QuartusII软件综合仿真后可知,系统最高工作频率为100 MHz,片上资源使用情况如表1所示。通过DE2-115开发板为验证平台,对上述系统进行测验,结果如图7所示。其中,图7(a)为对所采集到的视频直接通过液晶显示器显示的彩色图像,图7(b)为对采集的视频进行处理得到的灰度图像,图7(c)灰度图像经过Sobel边缘检测算法处理后的图像。实际液晶显示彩色图像、灰度图像、边缘检测图像
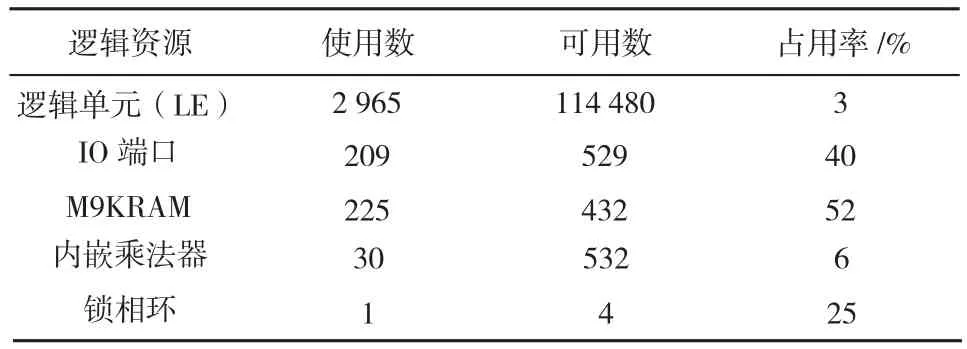
表1 片上资源使用情况Tab.1 Device utilization summary

图7 系统实际显示效果图Fig. 7 System actual display figure
4 结 论
设计了一个基于FPGA的的视频实时边缘检测系统,利用FPGA良好的并行结构,使计算速率得到了很大提升,达到了系统的实时性要求。实现了VGA分辨率视频在液晶屏上的彩色显示、灰度显示、边缘检测图像显示,在图像纹理复杂的情况下也能较好的提取图像边缘。实验结果表明,该系统具有速度快、精度高等优点,能够很好的应用在目标识别、目标跟踪、智能视频监控等领域。
[1] 吴继华,蔡海宁,王诚.Altera FPGA/CPLD设计(高级篇)[M].北京:人民邮电出版社,2011.
[2] 杨杰,黄朝兵.数字图像处理及MATLAB实现[M].北京:电子工业出版社,2010.
[3] 蔡立晶,蔡立娟,杨立.基于指纹图像边缘检测算法的比较研究[J].中国新技术新产品, 2009(01):3-4.
CAI Li-jing,CAI Li-juan,YANG Li. A comparative study of image edge detection algorithm based on fingerprint[J].China New Technologies and Products,2009(01):3-4.
[4] 刘威,石彦杰,高博.基于FPGA 的VGA 显示模式识别 [J].计算机工程与科学,2008(4):152-155.
LIU Wei,SHI Yan-hao,GAO Bo.FPGA-Based VGA Display Mode Recogniton[J].Computer Engineering & Science,2008(4):152-155.
[5] 张辉,曲士茹.基于FPGA硬件实现的图像边缘检测及仿真[J].计算机仿真,2010(3):232-236.
ZHANG Hui,QU Shi-ru.Image edge detection and simulation based on FPGA[J].Computer Simulation,2010(3):232-236.
[6] 陆小峰,张俊豪,陆晓成.基于FPGA的图像分块实时边缘检测系统[J].电视技术,2012(21):51-54.
LU Xiao-feng,ZHANG Jun-hao,LU Xiao-cheng. Real-time edge detection system based on image partition using FPGA[J].Video Engineering,2012(21):51-54.
[7] Omni Vision Technologies Inc.OV7670 Datasheet V1.4[S.l.]:Omni Vision Technologies Inc,2006:8.
[8] 宋海吒,唐立军,谢新辉.基于FPGA 和OV7620 的图像采集及VGA 显示[J].电视技术,2011(5):45-61.
SONG Hai-tuo,TANG Li-jun,XIE Xin-hui. Image acquisition and VGA display based on OV7620 and FPGA[J].Video Engineering,2011(5):45-61.
FPGA-based real-time video edge detection system
GUO Long, DUAN Zhe-min, CHEN Yang, LI Rong, TIAN Zhi-hai
( College of Electronic Information, Northwestern Polytechnic University, Xi’an 710129, China)
Based on the requirement of the video image detection and identification, the design of the video edge detection system based on FPGA is proposed in this paper. Camera is controlled by FPGA for video capture, dual-port SDRAM cache image data, FPGA complete the real-time data processing. Actual use DE2-115 development board and CMOS camera OV7670 as the hardware platform for verification. The experiment and application show that this system has good performance, and achieve the design requirement.
FPGA; OV7670; video capture; edge detection; VGA
TN83
A
1674-6236(2014)03-0183-03
2013–05–29 稿件编号:201305290
郭 龙(1989—),男,陕西咸阳人,硕士研究生。研究方向:数模混合集成电路设计。
