基于主从式结构的智能图书整理机器人的设计
2014-09-23郝建涛
张 振 ,张 琪 ,王 新 ,郝建涛
(1.山东理工大学 山东 淄博 255000;2.哈尔滨工业大学 深圳研究生院,广东 深圳 518055)
基于主从式结构的智能图书整理机器人的设计
张 振1,张 琪1,王 新1,郝建涛2
(1.山东理工大学 山东 淄博 255000;2.哈尔滨工业大学 深圳研究生院,广东 深圳 518055)
本文介绍了基于主从式结构的智能图书整理机器人的设计与实现,该系统由移动车体、机械臂和图书识别处理模块三部分组成。智能图书整理机器人控制系统采用主从式单片机的控制,由信息采集处理模块、机械臂控制模块和主控模块组成。它可以实现对图书的识别、取放、整理等工作。该系统设计简单、执行效率高、减少了管理人员的劳动强度。当今世界是信息化时代,图书整理的智能化必然会发展成为一大产业,并带动其他产业的发展,因此该系统拥有广阔的发展空间。
智能图书整理机器人;图像处理;移动机械臂;主从结构
当代社会是一个智能化、人性化的社会,处处体现了科技所带来的便利和无穷的魅力。根据我们的研究和调查发现,我国中等以上规模的图书馆占有相当大的比例,图书产业是一个有规模、有实力、有影响力的信息产业。国家图书馆、省( 市) 级图书馆、高校图书馆、各部门专业图书馆构成了图书馆事业的主体, 据不完全统计藏有书约10 亿余册( 件) , 每年接待读者约数千万( 人) 次。但是,我们的图书处理手段还停留在传统的人工整理阶段,图书馆还是采用人抱、车推和手工等方式进行上架、下架、整理、清点、记录等工作。人工整理图书要求工作人员首先要记住每一类图书的存放区域,其次要找到要存放图书的准确位置,才能完成图书的存放,工作量很大,而且效率很低。所以, 实现图书借阅、上架、下架、清点、整理、传送的机械化、自动化是图书馆自动化的重要组成部分。而在图书借阅、上架、下架、清点、整理、传送上采用机器人的处理方式是今后发展的一大趋势。
本项目研发的智能型图书整理机器人正是在这种背景下应运而生的,本智能型图书整理机器人是可以进行自动化识别并实现搬运作业的小型机器人。它的特点是可通过编程来完成机器人的各种预期的作业任务,在构造和性能上兼有人和机器各自的优点,尤其体现了机器人的智能型和人性化。它能灵活地实现图书的取放和整理工作,具有效率高,体积小巧、实用等特点,在图书馆的日常管理中有很大的应用空间。
1 系统整体方案
如图1所示,智能图书整理机器人整体结构采用主从式,主要有移动车体、机械臂和图书识别处理模块组成[1-2]。主控机采用技术成熟的AT89C51单片机进行控制,主要完成对从机的控制及机械臂的控制来完成取放任务。从机采用双从机结构设计,其中采用infineonXC164CS单片机进行传感器信息的处理及驱动机器人按指定路径扫描图书,而图书识别模块的信息处理由MC9S12XS128单片机完成。采用这种结构,大大降低了对主机性能的要求,而且实现了对信息准确的获取与快速处理,使整体系统运作更高效。
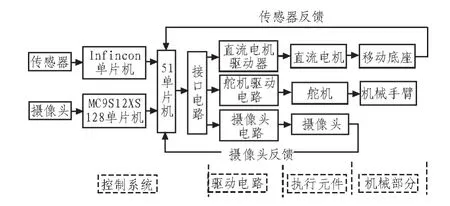
图1 系统整体结构图Fig. 1 Overall system structure diagram
2 系统硬件设计
2.1 主控电路设计
本系统采用AT89C51作为主控芯片,其主要特性为:4 kB内部Flash ROM,128B内部RAM,32根I/O线,2个16位定时器/计数器,1个可编程全双工串行通讯口,最高工作频率24 MHz[3]。如图2所示为主控系统的电路原理图,为实现主控芯片对于五自由度移动机械臂的控制,外接两片8253可编程定时器/计数器即可方便的实现对五自由度机械臂的控制。本系统的优点是处理速度快、性价比高、资源丰富可扩展,并且工作稳定可靠[4]。

图2 主控电路设计Fig. 2 Main control circuit design
2.2 图书识别模块设计
图书识别模块分为图像采集模块和图像处理模块,图像采集是基于Omnivision公司的CMOS图像传感器---OV7620的方案设计,它支持连续和隔行两种扫描方式,VGA与QVGA两种图像格式;最高像素为664×492,帧速率为30 fps;数据格式包括YUV、YCrCb、RGB 3种,能够满足一般图像采集系统的要求[5]。其电路图如图3所示。
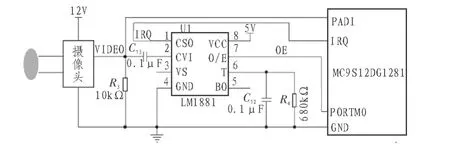
图3 图像采集电路Fig. 3 Image acquisition circuit
基于现在图书的种类繁杂,且无统一的电子识别标准,本文所研发的智能型图书整理机器人对于的图书识别暂定采用指定模型图书,即长15 cm,高20 cm,宽5 cm的规则长方体。不同的图书用不同颜色的长方体代替,经过实验调试,本机器人可以识别的图书颜色种类可达数10种。
图像处理芯片采用MC9S12XS128,其可实现对摄像头采集的信息进行分析处理确定目标图书,并将处理后的信号通过串口通信送于主控系统,用于发现目标图书或乱架图书,主控系统根据所送信号实现对图书的定位和取放。
2.3 驱动电路设计
驱动系统和传感器定位系统电路主要为XC164CS单片机模块,XC164CS电路板控制电机和传感器的原理图如图4所示。电源转换模块采用LM2575和电阻、电容滤波将24 V的电压转成5 V电压,给单片机模块和驱动器公共端供电,通信模块采用ADM2587芯片实现数据输出,电源转换模块和通信模块如图5、6所示。直流电机用一个直流电机驱动器,芯片是LMD18200。该芯片的优点是转速可调,抗干扰能力强;具有续流保护,PWM脉宽平滑调速,可实现正反转。直流电机驱动器需要3个信号,从而控制直流电机的转速方向刹车。直流电机的转速由PWM控制,通过这种可调脉宽来控制直流
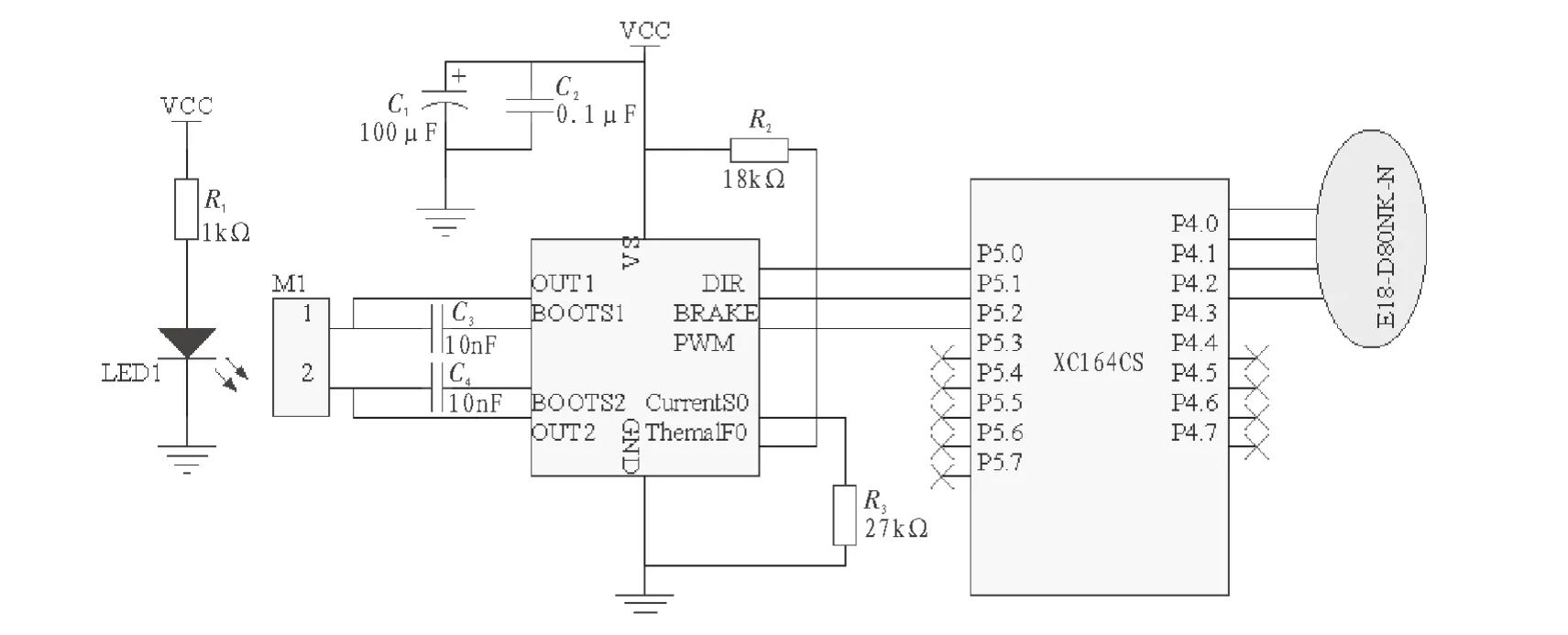
图4 XC164CS控制电机和传感器原理图Fig. 4 XC164CS motor control and sensor principle diagram
电机的速度,PWM信号由infineonXC164CS芯片生成。

图5 电源转换模块设计Fig. 5 Design of power conversion module

图6 通信模块设计Fig. 6 Design of communication module
3 系统设计与实现
控制系统设计的整体思路如图7,传感器实时采集外部环境信息,通过对不同传感器采集信息的融合完成对机器人的定位,根据程序要求确定任务并进行路径规划,机器人在指定路径进行扫描,确定目标图书后,主控单片机控制移动机械臂完成对图书的拿取,根据要求放入规定位置完成图书借阅或整理。
本设计采用移动机械臂系统,是将机械臂固定在移动车体上构成的一类移动机器人。这种结构使机械臂拥有几乎无限大的工作空间和高度的运动冗余性,并同时具有移动和操作功能,这使它优于移动机器人和传统的机械臂[6]。

图7 整体设计思路Fig. 7 Overall design idea
AT89C51主控芯片控制具体流程图如图8所示,图像处理流程图如图9所示。开始,首先进行机器人的初始化,控制从机启动并初始化,随后机器人按程序设定进行图书扫描,如果搜索到目标图书,由从机向主机申请中断请求,进入中断程序由主机控制舵机完成对图书的拿取工作,判断是否是乱架图书或待借图书,如果是乱架图书,将图书放到正确位置;如果是待借图书,放至取书处,完成一次借书任务。
实物样机的研发,首先用solidworks软件构建机器人模型,并进行各个结构参数的优化,确定好参数后进行样机的试制,最后是机器人的调试,完成预定任务。三维模型和样机照片如图10所示。
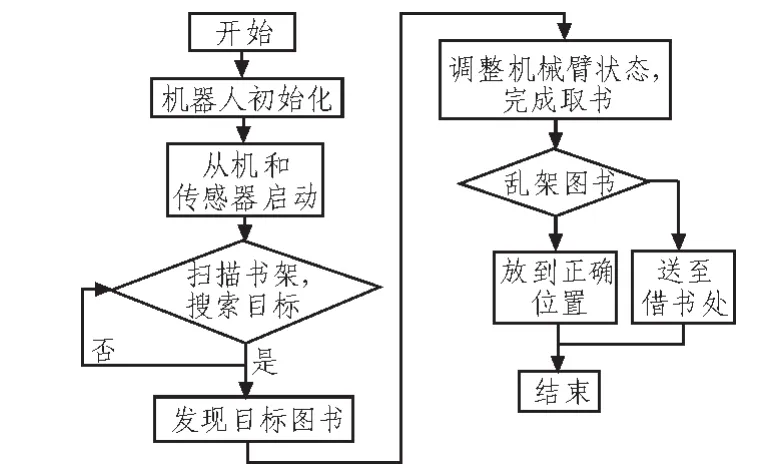
图8 主控芯片控制流程图Fig. 8 Main control chip control flow chart

图9 图像处理模块流程图Fig. 9 Image processing module flow chart
4 结 论
文中给出了基于主从式单片机控制的智能图书整理机器人的硬件和软件设计方法,该方法成本低,易于实现。经过反复调试和实验,机器人能够准确识别图书,完成对图书的取放和整理。该系统还可以加入数据库技术和基于足球机器人平台的摄像定位技术,在信息化时代的今天有较大的发展
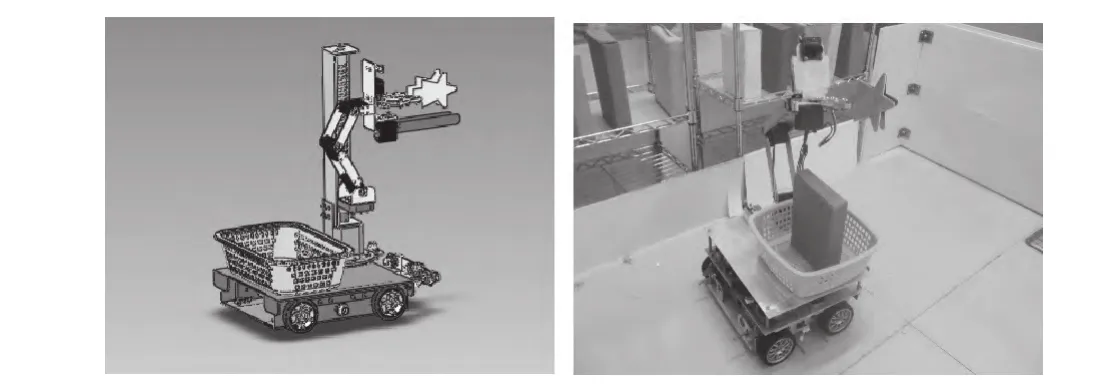
图10 整体结构图Fig. 10 The overall structure diagram
前景。
[1] 李雷.基于MCS-51控制的军用自动仓储搬运机器人设计实现[J].系统仿真技术,2011,7(2):100-103.
LI Lei. The military automatic warehouse handling robot design based on MCS-51[J]. System simulation technology,2011,7(2):100-103.
[2] 靳大为,轮式物料搬运机器人系统开发研究[D].北京:北京交通大学,2006.
[3] 张毅刚.MCS-51单片机应用设计[M].哈尔滨:哈尔滨工业大学出版社,1997.
[4] 郭天祥.新概念51单片机C语言教程[M].北京:电子工业出版社,1999.
[5] 李刚,陈世利,周鑫玲. 飞思卡尔8位单片机实用教程. [M].北京:电子工业出版社,2009.
[6] 闫超勤.智能移动机械臂的控制研究[D].西安:西安电子科技大学,2003.
Design of book sorting robots based on master-slave structure
ZHANG Zhen1, ZHANG Qi1, WANG Xin1, HAO Jian-tao2
(1.Shandong University of Technology, Zibo 255000, China; 2.Shenzhen Graduate School of Harbin Institute of Technology, Shenzhen 518055, China)
This paper introduces the design and implementation of the intelligent book sorting robot based on masterslave structure. The system consists of three parts: the mobile body, the mechanical arm and the book recognition processing module. The intelligent book sorting robot system adopts the master-slave SCM system. It is concluded that the information acquisition and processing module, the manipulated control module and main control module. It can achieve the work about the recognition, placing and sorting of the book. And so on. The design of the system is simple,high efficiency, and it can reduce labor intensity of managers. The world today is the era of information, intelligent book arrangements will become a big industry, and promote the development of other industries, so the system has broad developing space.
book sorting robot; image processing; mobile manipulator; master-slave structure
TN710
A
1674-6236(2014)03-0120-04
2013–06–14 稿件编号:201306092
张 振(1991—),男,山东齐河人。研究方向:测控技术及仪器,智能机器人。